Tutorial: Serial Communication in Matlab
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Series 90-70 Programmable Controller Data Sheet Manual, GFK-0600F
This Datasheet for the IC697CGR935 Hot Standby Genius Dual Bus CPU, 486DX4, 12K Discrete I/O, 1M byte fixed user memory, Floating Pt. http://www.cimtecautomation.com/parts/p-14765-ic697cgr935.aspx Provides the wiring diagrams and installation guidelines for this GE Series 90-30 module. For further information, please contact Cimtec Technical Support at 1-866-599-6507 [email protected] 1 PLC CPUs 24 IC697CGR935 GFK-1439C 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory November 1999 PLC CPUs Central Processing Unit for CPU Redundancy Applications 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory Central Processing Unit for CPU Redundancy Applications (IC697CGR935) datasheet GFK-1439C Features D Symptom status bits and fault tables D Memory parity and checksums D Required for CPU redundancy applications D Supports floating point calculation D CommonI/O on IC660/IC661 bus D Single slot CPU D Manual switching with pushbutton switch on Redundan- D 12K inputs and 12K outputs (any mix) cy Communications Module D Up to 8K analog I/O a45734 D 0.4 microseconds per boolean function D 96 MHz, 80486DX4 microprocessor ÎÎÎÎÎ D SupportsIC660/IC661 and IC697 I/O products ÎÎ OK P1 CGR 935 ÎÎÎÎÎ ÎÎ Î ÎÎ ÎÎÎ D Programmed by MS-DOSr or Windowsr based software RUN P2 Î TOP products EN P3 OFF ÎÎÎÎ Î Î ÎÎ Î ÎÎÎ ÎÎÎ ÎÎÎ D MEM PROTECT O Supports 1 Mbyte of battery-backed fast CMOS RAM B REMOTE PROGRAMMERN ÎÎÎÎÎ Î Î ÎÎÎ ÎÎÎ ÎÎA MEMORY PROTECT memory in the same slot T KEY POSITION T ÎÎÎÎÎ Î Î ÎÎÎ D ÎÎE FRONT Configurable data and program memory R O -

Experiment 2: Identify Common Peripheral Ports, Associated Cables and Their Connectors
Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th Experiment 2: Identify Common Peripheral ports, associated cables and their connectors. Aim To identify Identify Common Peripheral ports, associated cables and their connectors. Objectives After performing this experiment students will be able to: Identify various peripherals ports. Identify different types of cables used in computer. Identify various connectors. Assumptions Students have basic knowledge of English language and Computer Hardware A Computre System Requirement Screw Driver Software Nil Requirement Learning Major Learning outcome of this experiment are: Outcome Identifying Ports, Cables and Connectors THEORY Port The Point at which peripheral attaches to. Communicates with a system unit so that peripheral can send data to or receive information from the computer. Following are the different Types of Ports of Computer System. 1) PS/2 Ports The PS/2 Ports are simple, 6-pin, low-speed serial connections commonly dedicated to a keyboard and mouse. Although these ports may look identical at first glance, they are not interchangeable, so you'll need to be extremely careful to attach the keyboard and mouse to their respective PS/2 port. 2) VGA Mointer Port Video Graphics Array: used to connect the monitor to the computer 3) Parallel Port P a g e | 8 Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th The parallel port originally started out as a unidirectional (output only) Printers and other devices are said to be either parallel or serial. Parallel means the device is capable of receiving more than one bit at a time (that is, it receives several bits in parallel). Most modern printers are parallel. -
Linking Computers and Consumer Electronics
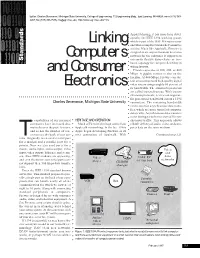
. Editor: Charles Severance, Michigan State University, College of Engineering, 112 Engineering Bldg., East Lansing, MI 48824; voice (517) 353- 2268; fax (517) 355-7516; [email protected]; http://www.egr.msu.edu/~crs Apple’s blessing, it has since been devel- oped by the IEEE 1394 working group, Linking which is part of the IEEE Microprocessor and Microcomputer Standards Committee activity. Much like Appletalk, Firewire is designed as an easy-to-maintain local area Computers network for the consumer. It supports an Standards Bianry Critic extremely flexible daisy-chain- or tree- based topology for complete flexibility in wiring layouts. and Consumer Firewire operates at 100, 200, or 400 Mbps. A gigabit version is also on the horizon. At 400 Mbps, Firewire can sus- tain an uncompressed high-quality digital Electronics video stream using roughly 50 percent of its bandwidth. The standard’s protocols are called isosynchronous. With isosyn- chronous protocols, devices can negotiate for guaranteed bandwidth across a 1394 Charles Severance, Michigan State University connection. The remaining bandwidth can be used for asynchronous data trans- fers, which are more typical of computer data traffic. Asynchronous data transfers occur during periods not reserved for syn- he capabilities of our personal HERITAGE AND OPERATION chronous traffic. This approach allows computers have increased dra- Much of Firewire’s heritage comes from reliable delivery of audio, video, and com- matically over the past 15 years, Appletalk networking. In the late 1980s puter data on the same medium. and so has the number of con- Apple began developing Firewire as its Tnectors on the back of our sys- next generation of Appletalk. -
Serial Port Utilities Installation
Serial Port Utilities August 2018 © 2017, 2018, Dilithium Design Serial Port Utilities Aug 2018 Contents Overview ............................................................................................................................................................................. 2 VCP Driver Installation .................................................................................................................................................. 2 Telnet Client Installation ................................................................................................................................................ 3 Firmware Upgrade .............................................................................................................................................................. 6 Performing an Upgrade .................................................................................................................................................. 6 Mac OSX Driver Installation .............................................................................................................................................. 8 Android Driver Installation ............................................................................................................................................... 13 Warrantee and Support ..................................................................................................................................................... 16 Document History ............................................................................................................................................................ -

How to Make “In Use” COM Ports Available 2 3
How to Make “in use” COM Ports Available When you connect your Computer Timing Interface to a USB Port, Windows assigns a COM Port number to the device. If you use a different USB Port the next time you plug it in, or if you’re also using a USB printer, they might get assigned a different COM Port number each time you use them. When a new port number is assigned, Windows doesn’t always clear the old port number so that it will still show as “in use”. Since TIMEWARE 2/MEETWARE recognize only 9 COM ports, you may eventually run out of available ports (this will change in the next version upgrade). Clearing the “in use” ports that aren’t really being used is a bit cumbersome, so here’s a step-by-step procedure to follow: Window’s Device Manager will show you a list of ports that are currently being used, but will not show ports that are assigned but not currently being used (“in use”). The first step is to make these “in use” ports visible on the list. (The red numbers on the picture match the numbers in the list below.) 1. Go to the Start button or Desktop, right-click on My Computer and select Properties 2. In the System Properties dialog box, select the Advanced tab 3. Click the Environment Variables button 4. In the Environment Variables dialog box, locate the System Variables panel and click New Picture 3 2 5 3 4 5. In the New System Variable dialog box, type DEVMGR_SHOW_NONPRESENT_DEVICES in the Variable Name text box and type 1 in the Variable Value text box. -
Serial Communication Buses
Computer Architecture 10 Serial Communication Buses Made wi th OpenOffi ce.org 1 Serial Communication SendingSending datadata oneone bitbit atat oneone time,time, sequentiallysequentially SerialSerial vsvs parallelparallel communicationcommunication cable cost (or PCB space), synchronization, distance ! speed ? ImprovedImproved serialserial communicationcommunication technologytechnology allowsallows forfor transfertransfer atat higherhigher speedsspeeds andand isis dominatingdominating thethe modernmodern digitaldigital technology:technology: RS232, RS-485, I2C, SPI, 1-Wire, USB, FireWire, Ethernet, Fibre Channel, MIDI, Serial Attached SCSI, Serial ATA, PCI Express, etc. Made wi th OpenOffi ce.org 2 RS232, EIA232 TheThe ElectronicElectronic IndustriesIndustries AllianceAlliance (EIA)(EIA) standardstandard RS-232-CRS-232-C (1969)(1969) definition of physical layer (electrical signal characteristics: voltage levels, signaling rate, timing, short-circuit behavior, cable length, etc.) 25 or (more often) 9-pin connector serial transmission (bit-by-bit) asynchronous operation (no clock signal) truly bi-directional transfer (full-duplex) only limited power can be supplied to another device numerous handshake lines (seldom used) many protocols use RS232 (e.g. Modbus) Made wi th OpenOffi ce.org 3 Voltage Levels RS-232RS-232 standardstandard convertconvert TTL/CMOS-levelTTL/CMOS-level signalssignals intointo bipolarbipolar voltagevoltage levelslevels toto improveimprove noisenoise immunityimmunity andand supportsupport longlong cablecable lengthslengths TTL/CMOS → RS232: 0V = logic zero → +3V…+12V (SPACE) +5V (+3.3V) = logic one → −3V…−12V (MARK) Some equipment ignores the negative level and accepts a zero voltage level as the "OFF" state The "dead area" between +3V and -3V may vary, many receivers are sensitive to differentials of 1V or less Made wi th OpenOffi ce.org 4 Data frame CompleteComplete one-byteone-byte frameframe consistsconsists of:of: start-bit (SPACE), data bits (7, 8), stop-bits (MARK) e.g. -

A Gumstix-Based MIDI-To-OSC Converter
midOSC: a Gumstix-Based MIDI-to-OSC Converter Sebastien´ Schiesser Institute for Computer Music and Sound Technology Zurich University of the Arts Baslerstrasse 30, 8048 Zurich, Switzerland [email protected] Abstract [14], sent to the remote-controlled devices location and con- A MIDI-to-OSC converter is implemented on a commer- verted back to MIDI. Until now, this has been done at each cially available embedded linux system, tighly integrated conversion point through a Max/MSP patch running on a with a microcontroller. A layered method is developed which computer connected to a MIDI interface. This is very de- permits the conversion of serial data such as MIDI to OSC manding in terms of hardware: in the backstage system of formatted network packets with an overall system latency the mAe, a computer is dedicated to conversion purposes below 5 milliseconds for common MIDI messages. only. And when MIDI devices are present on stage, an ad- The Gumstix embedded computer provide an interest- ditional laptop with interface is required. ing and modular platform for the development of such an The mAe is intended to be modular and to support several embedded applications. The project shows great potential “I/O hubs”, where audio and control data are collected and to evolve into a generic sensors-to-OSC ethernet converter dispatched. In order to avoid dependence on a converting which should be very useful for artistic purposes and could computer at each hub, it seemed appropriate to use a dedi- be used as a fast prototyping interface for gesture acquisition cated converter which can run independently, be stacked in devices. -

Introduction to Serial Communication
Technical Tutorial Introduction to Serial Communication Introduction to Serial Communication Technical Tutorial 2002 – 12 - 06 Technical Tutorial Introduction to Serial Communication Table of Contents 1: Introduction 1.1. DCE and DTE Devices 1.2. Synchronous data transfer 1.3. Asynchronous data transfer 2: RS232 2.1. RS232 on DB9 (9-pin D-type connector) 2.2. RS232 on DB25 (25-pin D-type connector) 2.3. RS232 on RJ-45 2.4. Signal Description 2.5. Limitations of RS232 3: RS422 and RS485 3.1. RS422 Serial Communication 3.2. RS485 Serial Communication 3.3. Converters 4: Summary Table 5: Serial Interface of Sena Products 5.1. HelloDevice Lite series 5.2. HelloDevice Pro series 5.3. HelloDevice Super series 5.4. IALink100 Series 5.5. VTS Series 2 Technical Tutorial Introduction to Serial Communication 1. Introduction The purpose of this application note is to attempt to describe the main elements in Serial Communication. This application note attempts to cover enough technical details of RS232, RS422 and RS485. 1.1. DCE and DTE Devices DTE stands for Data Terminal Equipment, and DCE stands for Data Communications Equipment. These terms are used to indicate the pin-out for the connectors on a device and the direction of the signals on the pins. Your computer is a DTE device, while most other devices such as modem and other serial devices are usually DCE devices. RS-232 has been around as a standard for decades as an electrical interface between Data Terminal Equipment (DTE) and Data Circuit-Terminating Equipment (DCE) such as modems or DSUs. -

Lab 5: Serial Communication (Sci/Spi) and C Objectives Required Materials Introduction
University of Florida EEL 3744 –Spring 2018 Dr. Eric M. Schwartz Electrical & Computer Engineering Dept. 28-Mar-18 Page 1/8 Revision 7 LAB 5: SERIAL COMMUNICATION (SCI/SPI) AND C OBJECTIVES As discovered in Homework 4, the asynchronous UART • Understand the basic operation and structure of protocol utilizes a transfer rate (denoted as the baud rate), as asynchronous and synchronous serial communication, well as two physical connections for each device to i.e., SCI (UART) and SPI. communicate data, i.e., a pin for Receiving data (Rx), and a pin • Utilize C programming constructs to create functions to for Transmitting data (Tx). The only way that this protocol interact with the XMEGA’s USART and SPI systems. functions correctly is if both devices agree on a common baud • Learn how to use SPI communication to interact with an rate. external IMU sensor package. • Stream and plot real-time 3D (XYZ) acceleration data SPI, on the other hand, utilizes a shared clock signal connected using the XMEGA’s USART system and Atmel Studio’s between (at least) two devices (usually denoted as SCK), where Data Visualizer. only one device is known as the “master” device, and where the other devices are “slaves.” Full-duplex communication is REQUIRED MATERIALS possible with SPI (i.e., two devices can talk to each other at the • µPAD v2.0 Development Board same time), although the master always starts any • Robotics Backpack communication between the devices. When the master wants • Digilent/NI Analog Discovery (DAD/NAD) kit to transmit/receive data to/from the slave(s), it generates the • LSM330.h header file synchronized Serial Clock signal (SCK). -

EB215 Local Interconnect Network (LIN)
Freescale Semiconductor EB215 Engineering Bulletin Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights the differences between two Local Interconnect Network (LIN) Physical Interfaces, namely the 33399 and the 33661. The LIN is a serial communication protocol designed to support automotive networks in conjunction with Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required. The 33399 and the 33661 are physical layer components dedicated to automotive sub-bus applications. They offer speech communication from 1.0 kbps to 20 kbps. There are two main operating modes: Normal and Sleep. For feature information, refer to the device data sheets for 33399 and 33661 © Freescale Semiconductor, Inc., 2005. All rights reserved. Differences Guide Differences Guide This section should be used as a quick guide to determine the main differences between the devices in a similar family. Using Table 1, you can note the differences most relevant to your system/application. This engineering bulletin should be used in conjunction with the most recent specification for each device, to ensure that all differences have been captured. Table 1. Device Differences Parameter 33399 33661 LIN Protocol Specification Addresses LIN 1.3 Applications Addresses LIN 2.0 Applications Terminal Out and Package 8-terminal SOICN. 8-terminal SOICN. One baud rate operation: Two baud rate operations: Baud Rate Operation 1.0 kbps to 20 kbps • 1.0 kbps to 10 kbps • 1.0 kbps to 20 kbps Capable of: Capable of: Controlling an external switchable voltage • Controlling an external switchable voltage INH Output regulator. -
LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications
AN1278 APPLICATION NOTE LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications INTRODUCTION Many mechanical components in the automotive sector have been replaced or are now being replaced by intelligent mechatronical systems. A lot of wires are needed to connect these components. To reduce the amount of wires and to handle communications between these systems, many car manufacturers have created different bus systems that are incompatible with each other. In order to have a standard sub-bus, car manufacturers in Europe have formed a consortium to define a new communications standard for the automotive sector. The new bus, called LIN bus, was invented to be used in simple switching applications like car seats, door locks, sun roofs, rain sensors, mirrors and so on. The LIN bus is a sub-bus system based on a serial communications protocol. The bus is a single master / multiple slave bus that uses a single wire to transmit data. To reduce costs, components can be driven without crystal or ceramic resonators. Time syn- chronization permits the correct transmission and reception of data. The system is based on a UART / SCI hardware interface that is common to most microcontrollers. The bus detects defective nodes in the network. Data checksum and parity check guarantee safety and error detection. As a long-standing partner to the automotive industry, STMicroelectronics offers a complete range of LIN silicon products: slave and master LIN microcontrollers covering the protocol handler part and LIN transceivers for the physical line interface. For a quick start with LIN, STMicroelectronics supports you with LIN software enabling you to rapidly set up your first LIN communication and focus on your specific application requirements. -

Getting Started with Your PCI Serial Hardware and Software for Windows 95
Serial Getting Started with Your PCI Serial Hardware and Software for Windows 95 PCI Serial for Windows 95 December 1997 Edition Part Number 321824A-01 Internet Support E-mail: [email protected] FTP Site: ftp.natinst.com Web Address: http://www.natinst.com Bulletin Board Support BBS United States: 512 794 5422 BBS United Kingdom: 01635 551422 BBS France: 01 48 65 15 59 Fax-on-Demand Support 512 418 1111 Telephone Support (USA) Tel: 512 795 8248 Fax: 512 794 5678 International Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 288 3336, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Hong Kong 2645 3186, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico 5 520 2635, Netherlands 0348 433466, Norway 32 84 84 00, Singapore 2265886, Spain 91 640 0085, Sweden 08 730 49 70, Switzerland 056 200 51 51, Taiwan 02 377 1200, United Kingdom 01635 523545 National Instruments Corporate Headquarters 6504 Bridge Point Parkway Austin, Texas 78730-5039 USA Tel: 512 794 0100 © Copyright 1997 National Instruments Corporation. All rights reserved. Important Information Warranty The serial hardware is warranted against defects in materials and workmanship for a period of two years from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period.