Further Investigations Into the Behaviour of Container Ships in Storms Above the Wadden Islands
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
PLASTIC MANAGEMENT and DEVELOPMENT on ISLANDS Research Project
\ Source: Frerck, n.d. PLASTIC MANAGEMENT AND DEVELOPMENT ON ISLANDS Research Project Nelle Kloosterboer IVM Supervisors: dr. P.J.H. van Beukering & H. Dijkstra Abstract The plastic soup is caused by large consumption and improper waste management of plastics worldwide. A global change in plastic management is needed to counter further growth of this problem. Many studies have been done on improving plastic management in large countries and regions, but islands have often been overlooked. Additionally, plastic pollution often ends up on the shorelines of islands, making sustainable plastic management a necessity on islands. This study investigates plastic management measures that contribute most effectively to sustainable plastic management and development on Texel and Sint Maarten. Firstly, the West Frisian Islands and the Dutch Caribbean Islands are analysed according to the island characteristics that influence the local plastic management system. Secondly, Material Flow Analyses of plastics are conducted for the West Frisian Islands and the Dutch Caribbean Islands to get an overview of the plastic product, waste, and pollution flows and discover specific trends surrounding plastics on the islands. Thirdly, Scenario Analyses are presented for the two case studies Texel and Sint Maarten, which show potential pathways towards sustainable plastic management on these islands. The results show that reducing plastic consumption is a slightly more effective strategy to improve sustainable plastic management and development than managing plastic waste and pollution. Furthermore, the methods utilized in this study have shown to be innovative and effective in improving plastic management systems on islands. Still, additional research is needed on macro- and microplastic flows, measures, and their impacts on islands worldwide to significantly contribute in reducing the plastic soup. -
Glossary of Nautical Terms: English – Japanese
Glossary of Nautical Terms: English – Japanese 2 Approved and Released by: Dal Bailey, DIR-IdC United States Coast Guard Auxiliary Interpreter Corps http://icdept.cgaux.org/ 6/29/2012 3 Index Glossary of Nautical Terms: English ‐ Japanese A…………………………………………………………………………………………………………………………………...…..pages 4 ‐ 6 B……………………………………………………………………………………………………………………………….……. pages 7 ‐ 18 C………………………………………………………………………………………………………………………….………...pages 19 ‐ 26 D……………………………………………………………………………………………..……………………………………..pages 27 ‐ 32 E……………………………………………………………………………………………….……………………….…………. pages 33 ‐ 35 F……………………………………………………………………………………………………….…………….………..……pages 36 ‐ 41 G……………………………………………………………………………………………….………………………...…………pages 42 ‐ 43 H……………………………………………………………………………………………………………….….………………..pages 49 ‐ 48 I…………………………………………………………………………………………..……………………….……….……... pages 49 ‐ 50 J…………………………….……..…………………………………………………………………………………………….………... page 51 K…………………………………………………………………………………………………….….…………..………………………page 52 L…………………………………………………………………………………………………..………………………….……..pages 53 ‐ 58 M…………………………………………………………………………………………….……………………………....….. pages 59 ‐ 62 N……………….........................................................................…………………………………..…….. pages 63 ‐ 64 O……………………………………..........................................................................…………….…….. pages 65 ‐ 67 P……………………….............................................................................................................. pages 68 ‐ 74 Q………………………………………………………………………………………………………..…………………….……...…… page 75 R………………………………………………………………………………………………..…………………….………….. -
Branch's Elements of Shipping/Alan E
‘I would strongly recommend this book to anyone who is interested in shipping or taking a course where shipping is an important element, for example, chartering and broking, maritime transport, exporting and importing, ship management, and international trade. Using an approach of simple analysis and pragmatism, the book provides clear explanations of the basic elements of ship operations and commercial, legal, economic, technical, managerial, logistical, and financial aspects of shipping.’ Dr Jiangang Fei, National Centre for Ports & Shipping, Australian Maritime College, University of Tasmania, Australia ‘Branch’s Elements of Shipping provides the reader with the best all-round examination of the many elements of the international shipping industry. This edition serves as a fitting tribute to Alan Branch and is an essential text for anyone with an interest in global shipping.’ David Adkins, Lecturer in International Procurement and Supply Chain Management, Plymouth Graduate School of Management, Plymouth University ‘Combining the traditional with the modern is as much a challenge as illuminating operations without getting lost in the fascination of the technical detail. This is particularly true for the world of shipping! Branch’s Elements of Shipping is an ongoing example for mastering these challenges. With its clear maritime focus it provides a very comprehensive knowledge base for relevant terms and details and it is a useful source of expertise for students and practitioners in the field.’ Günter Prockl, Associate Professor, Copenhagen Business School, Denmark This page intentionally left blank Branch’s Elements of Shipping Since it was first published in 1964, Elements of Shipping has become established as a market leader. -
Course Objectives Chapter 2 2. Hull Form and Geometry
COURSE OBJECTIVES CHAPTER 2 2. HULL FORM AND GEOMETRY 1. Be familiar with ship classifications 2. Explain the difference between aerostatic, hydrostatic, and hydrodynamic support 3. Be familiar with the following types of marine vehicles: displacement ships, catamarans, planing vessels, hydrofoil, hovercraft, SWATH, and submarines 4. Learn Archimedes’ Principle in qualitative and mathematical form 5. Calculate problems using Archimedes’ Principle 6. Read, interpret, and relate the Body Plan, Half-Breadth Plan, and Sheer Plan and identify the lines for each plan 7. Relate the information in a ship's lines plan to a Table of Offsets 8. Be familiar with the following hull form terminology: a. After Perpendicular (AP), Forward Perpendiculars (FP), and midships, b. Length Between Perpendiculars (LPP or LBP) and Length Overall (LOA) c. Keel (K), Depth (D), Draft (T), Mean Draft (Tm), Freeboard and Beam (B) d. Flare, Tumble home and Camber e. Centerline, Baseline and Offset 9. Define and compare the relationship between “centroid” and “center of mass” 10. State the significance and physical location of the center of buoyancy (B) and center of flotation (F); locate these points using LCB, VCB, TCB, TCF, and LCF st 11. Use Simpson’s 1 Rule to calculate the following (given a Table of Offsets): a. Waterplane Area (Awp or WPA) b. Sectional Area (Asect) c. Submerged Volume (∇S) d. Longitudinal Center of Flotation (LCF) 12. Read and use a ship's Curves of Form to find hydrostatic properties and be knowledgeable about each of the properties on the Curves of Form 13. Calculate trim given Taft and Tfwd and understand its physical meaning i 2.1 Introduction to Ships and Naval Engineering Ships are the single most expensive product a nation produces for defense, commerce, research, or nearly any other function. -

List of Registered Vessels Effective Date for EPD Reg
Environmental Protection Department Extended Port Facilities and Light Dues Incentive Scheme List of Registered Vessels Effective date for EPD Reg. registration Vessel Name IMO No. Call Sign Type of Vessel Nationality of Vessel Remarks No. (DD/MM/YYYY) N00001 1/7/2015 MAGNAVIA 9122447 A8BI5 CONTAINER LIBERIA N00002 1/7/2015 KARIN 9220433 A8IK5 CONTAINER LIBERIA N00003 1/7/2015 UNI ASSENT 9130585 3FBD9 CONTAINER PANAMA N00004 1/7/2015 UNI ASPIRE 9130573 3FVN8 CONTAINER PANAMA N00005 1/7/2015 UNI POPULAR 9202209 3FZG9 CONTAINER PANAMA N00006 1/7/2015 EVER PRIDE 9249233 VQGH8 CONTAINER UNITED KINGDOM OF GREAT BRITAIN N00007 1/7/2015 EVER UNITED 9116589 9V7957 CONTAINER SINGAPORE N00008 1/7/2015 EVER DYNAMIC 9142198 3FUB8 CONTAINER PANAMA N00009 1/7/2015 VANTAGE 9628192 9HA3435 CONTAINER MALTA N00010 1/7/2015 KARMEN 8906731 A8XJ9 CONTAINER LIBERIA N00011 1/7/2015 EVER UNIFIC 9168843 9V7961 CONTAINER SINGAPORE N00012 1/7/2015 ITAL MODERNA 9349629 ICAM CONTAINER ITALY N00013 1/7/2015 EVER PRIMA 9249245 VQUK5 CONTAINER UNITED KINGDOM OF GREAT BRITAIN N00014 1/7/2015 EVER DEVELOP 9142174 3FLF8 CONTAINER PANAMA N00015 1/7/2015 VALUE 9628166 9HA3355 CONTAINER MALTA N00016 1/7/2015 EVER LENIENT 9604146 2HDF9 CONTAINER UNITED KINGDOM OF GREAT BRITAIN N00017 1/7/2015 ITAL UNIVERSO 9196993 IBSP CONTAINER ITALY N00018 1/7/2015 UNI PACIFIC 9202156 3FCE9 CONTAINER PANAMA N00019 1/7/2015 EVER SMILE 9300415 MLTH5 CONTAINER UNITED KINGDOM OF GREAT BRITAIN N00020 1/7/2015 EVER SMART 9300403 MLBD9 CONTAINER UNITED KINGDOM OF GREAT BRITAIN N00021 1/7/2015 EVER -
Load Line Rules
RUSSIAN MARITIME REGISTER OF SHIPPING LOAFORD SEA-GOIN LINE GRULE SHIPS S Saint-Petersburg Edition 2017 Load Line Rules for Sea-Going Ships of Russian Maritime Register of Shipping have been approved in accordance with the established approval procedure and come into force on 1 January 2017. The present twentieth edition of the Rules is based on the nineteenth edition of 2016 taking into account the additions and amendments developed immediately before publication. The unified requirements, interpretations and recommendations of the International Association of Classification Societies (IACS) and the relevant resolutions of the International Maritime Organization (IMO) have been taken into consideration. The Rules are published in electronic format and hard copy in Russian and English. In case of discrepancies between the Russian and English versions, the Russian version shall prevail. ISBN 978-5-89331-352-9 © POCCHHCKHH MopcKofi peracTp CyHOXOflCTBa, 2017 As compared to the previous edition (2016), the twentieth edition contains the following amendments. LOAD LINE RULES FOR SEA-GOING SHIPS 1. Editorial amendments have been made. CONTENTS LOAD LINE RULES FOR SEA-GOING SHIPS 1 General 5 5 Special requirements for ships engaged in 1.1 Scope of application 5 international voyages which are assigned 1.2 Definitions and explanations 7 timber freeboards 43 1.3 Areas of navigation 10 5.1 Conditions of assignment of timber 1.4 Scope of survey and certificates 10 freeboards 43 1.5 General technical requirements 13 5.2 Calculation of minimum timber 2 Load line marking on ships engaged in freeboards 44 international voyages 14 6 Load lines of ships of 24 m in length and more 2.1 Deck line and load line mark 14 not engaged in international voyages 2.2 Lines to be used with load line mark. -

Verlies Van Containers Op Zee
THEMANUMMER: VERLIES VAN CONTAINERS OP ZEE NR 1 - MAART 2019 Maritieme hbo-opleidingen, cursussen en trainingen www.miwb.nl Postbus 26 8880 AA West-Terschelling T 0562 44 66 00 NHL Hogeschool. Vergroot je perspectief. COLOFON VOOR UW AGENDA Notices to Master Mariners verschijnt 4 maal per jaar en is 10 mei Antwerpen CESMA seminar het officiële en onafhankelijke orgaan van de 16 mei Amsterdam Algemene ledenvergadering Nederlandse Vereniging van Kapiteins ter Koopvaardij (NVKK). 10 oktober Amsterdam Symposium De NVKK is opgericht in 1943 en aangesloten bij: IFSMA, International Federation of Shipmaster’s Associations Beide locatie: Koninklijk College Zeemanshoop CESMA, Confederation of European Shipmaster’s Associations. ALGEMENE ADRESGEGEVENS: Postadres: Nederlandse Vereniging van Kapiteins ter Koopvaardij, Wassenaarseweg 2, 2596 CH ‘s-Gravenhage E-mail: [email protected] INHOUDSOPGAVE Website: www.nvkk.nl ----------------------------- Nieuwjaarstoespraak voorzitter 5 Dagelijks Bestuur: Kort Maritiem Nieuws 7 Voorzitter: L. van den Ende, : 06-83944694 North Pole Shift (NOAA) 8 Vice-voorzitter: J.P. Bosma, : 06-13827308 Container incident MSC Zoe 10 Secretaris: D. Roest, : 06-23850923 Penningmeester: J. Boonstra : 06-13639145 Ingezonden brief, J.M. Kooijman 12 Ingezonden brief, M.A. Busker 13 Hoe verliest een schip op zee 291 containers, C.A. den Rooijen 17 Betalingen: Container loss in heavy seas, T.n.v. Penningmeester NVKK, Den Haag analysis by G. Schütze 18 Bankrekening: IBAN: NL14 INGB 0002 4653 14 If Nobody Entered Enclosed Spaces 31 Nieuw boek, W.F. Erne 32 Redactie: H.A. L’Honoré Naber, CESMA seminar 10 mei 33 J.P.Bosma Bestuursmededelingen 34 C.J.W.Herfst J.C.Ulrich Bijdragen van: R. -

Extreme Waves and Ship Design
10th International Symposium on Practical Design of Ships and Other Floating Structures Houston, Texas, United States of America © 2007 American Bureau of Shipping Extreme Waves and Ship Design Craig B. Smith Dockside Consultants, Inc. Balboa, California, USA Abstract Introduction Recent research has demonstrated that extreme waves, Recent research by the European Community has waves with crest to trough heights of 20 to 30 meters, demonstrated that extreme waves—waves with crest to occur more frequently than previously thought. Also, trough heights of 20 to 30 meters—occur more over the past several decades, a surprising number of frequently than previously thought (MaxWave Project, large commercial vessels have been lost in incidents 2003). In addition, over the past several decades, a involving extreme waves. Many of the victims were surprising number of large commercial vessels have bulk carriers. Current design criteria generally consider been lost in incidents involving extreme waves. Many significant wave heights less than 11 meters (36 feet). of the victims were bulk carriers that broke up so Based on what is known today, this criterion is quickly that they sank before a distress message could inadequate and consideration should be given to be sent or the crew could be rescued. designing for significant wave heights of 20 meters (65 feet), meanwhile recognizing that waves 30 meters (98 There also have been a number of widely publicized feet) high are not out of the question. The dynamic force events where passenger liners encountered large waves of wave impacts should also be included in the (20 meters or higher) that caused damage, injured structural analysis of the vessel, hatch covers and other passengers and crew members, but did not lead to loss vulnerable areas (as opposed to relying on static or of the vessel. -

Teluk Rubiah Maritime Terminal
TELUK RUBIAH MARITIME TERMINAL Summary of information on Major Import Wharf (MIW) Distance of Trestle 2116 M (Main Access Trestle : 1894 M & Transfer Platform : 222 M) from shore Width of Trestle 4.080 M Length MIW 510 meter Width of MIW 35 m Maximum Vessel 362 meter (Valemax) Length projected Minimum Vessel 234.36 (Capesize) Length projected Expected Type of Valemax & Capesize Vessel Major Import Wharf (MIW) TELUK RUBIAH MARITIME TERMINAL TELUK RUBIAH MARITIME TERMINAL Quick Release Hook Arrangement at Main Import Wharf Green Color Quick Release Hook White Color No Quick Release Hook Number of QRH 21 (all double hook) QRH SWL 100 ton per Hook QRH opening 90°opening, 45° turning inside Distance between 15 meter for QRH (J19 till J25 & J41 till J47), 30 meter for QRH (J27 till QRH J39) TELUK RUBIAH MARITIME TERMINAL Type of Fender Cell Fender Cell Fender Diagram n Dimension (unit in mm) SCK 2250H E0.9 Projection for QRH 12 QRH (24 lines) use for Valemax Distance between Fender to QRH 2.5 m 6.15 meter TELUK RUBIAH MARITIME TERMINAL Maximum Berthing Velocity 0.2 knots Maximum Allowable 200kn/m₂ Hull Pressure TELUK RUBIAH MARITIME TERMINAL Ship Unloader Specification 1. SHIP UNLOADER INFORMATION CAPACITY A Total lifting capacity 73 t 73T B Grab dead weight 26T C Grab load capacity 47T 2. CAPACITY (per grab) A Rated capacity 2900 t/h B Maximum capacity 3500 t/h C Average capacity 1400 t/h D Time per cycle (optimum) 43.8s E Number of cycle per hour 82.2 c/hr 3. -

ORR Rulebook Provides Details About Measurement, Rule Restrictions, Ratings and the Requirements to Race Under ORR
2018 OFFSHORE RACING RULE (ORR™) A Handicap Rating System for Offshore Boats Published by the Offshore Racing Association www.offshoreraceracingrule.org ORR OWNER’S QUICK START GUIDE* (*The Quick Start Guide is meant to be used as a help guide for owners and for informational purposes only: it is not to be considered part of the ORR Rule Book). Brief The Offshore Racing Rule (ORR) is owned and administered by the Offshore Racing Association (ORA). The ORA is the Rule Authority. The ORR predicts relative time allowances between boats to permit boats of different sizes, types and ages to compete with the fairest ratings possible. The ORR is an objective rule. Its ratings are based on the measurement of the speed-related features of sailboats and on the use of the ORR Velocity Prediction Program (VPP) that then calculates the speed potential of each boat at any combination of wind speed and course direction by assessing the measured data. The ORR VPP is a set of algorithms developed through the latest specific fundamental scientific research for its ongoing development. ORR is intended to be a non-type forming measurement rule that fairly rates properly designed and prepared boats which are equipped for offshore racing. It must be clearly understood by all who use the ORR that it is not a development rule and therefore is not intended for sailors who are looking to “beat” the rule. In order to discourage attempts to design boats “to the rule”, the algorithms of the VPP are non-public and only limited access is allowed for trial certificates. -
Ship Particulars For
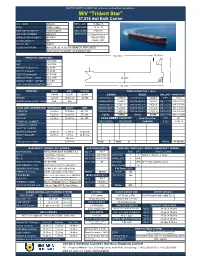
SHIP'S PARTICULARS (for reference only without guarantee) M/V "Trident Star" 57,836 dwt Bulk Carrier CALL SIGN VROR5 KEEL LAID 13-May-15 FLAG HONG KONG LAUNCHED 14-Jul-15 Ship's Photo PORT OF REGISTRY HONG KONG DELIVERED 8-Oct-15 OFFICIAL NUMBER HK-4373 SHIPYARD TSUNEISHI HEAVY IMO/LLOYDS NUMBER 9707637 INDUSTRIES CLASS SOCIETY NK (CEBU), INC. P & I CLUB GARD CLASS NOTATION NS*(CSR, BC-A, BC-XII, GRAB 20, PSPC-WBT) (ESP)(IWS)(PSCM)(BWTS)(IHM)MNS*(M0) 162.72 m 27.27m PRINCIPAL DIMENSIONS LOA 189.99 M LBP 185.78 M BREADTH (Extreme) 32.26 M DEPTH (molded) 18.00 M HEIGHT (maximum) 47.516 M BRIDGE FRONT - BOW 162.72 M 18.00m BRIDGE FRONT - STERN 27.27M LIGHT SHIP DISPLACEMETNT 9974 185.78m TONNAGE REGD SUEZ PANAM TANK CAPACITIES ( cbm ) NET 19,449 32,241 26,841 GRAIN BALE BALLAST TANK(100%) GROSS 32,370 32,694.28 32,370 CARGO HOLD 1 12704.5 CARGO HOLD 1 12024.2 FPT 1683.4 GROSS Reduced (R'n:13495) N/A N/A CARGO HOLD 2 15524.3 CARGO HOLD 2 14810.9 DBT 1 P/S1,314.8 /1,314.8 CARGO HOLD 3 15231.8 CARGO HOLD 3 14523.4 DBT 2 P/S1,618.7 /1,618.7 LOAD LINE INFORMATION FREEBOARD DRAFT DWT CARGO HOLD 4 15190.6 CARGO HOLD 4 14472.0 DBT 3 P/S1,701.1 /1,701.1 TROPICAL 4.958 m 13.094 m 59, 371 CARGO HOLD 5 14003.0 CARGO HOLD 5 13517.5 DBT 4 P/S1,238.8 /1,238.8 SUMMER 5.225 m 12.827 m 57, 836 TOTAL 72654.2 TOTAL 69348 DBT 5 P/S1,059.8 /1,059.8 WINTER 5.492 m 12.560 m 56, 302 LOG/LUMBER CAPACITY Deck Stanchion APT 661 TROPICAL, LUMBER DECK(CBM) HOLD(CBM) Height(M) C.H.3 15,343.10 SUMMER, LUMBER WINTER, LUMBER NORMAL BALLAST 12.912 m 5.140 m 15,053 mt HEAVY BALLAST 9.262 m 8.79 m 34,923 mt FWA 294 mm TPC @ Summer draft 57.47 mt Total:0 Total: 0 TOTAL 31,553.90 MACHINERY / PROPELLER / RUDDER HFO TANKS(100%) WINCHES / WINDLASS / ROPES / EMERGENCY TOWING MAIN ENGINE MITSUI MAN B&W 6S50ME-C8.2 NO.1 P 364.7 FWD AFT PARTICULARS M.C.R. -

Vessel's Particulars
VESSEL'S PARTICULARS NAME : M/V INCE ANADOLU MMSI NO : 271002722 CALL SIGN : TCTP5 INM F PHN. NO : 764898190 NATIONALITY : TURKISH INM F FAX NO : 764898192 PORT OF REGISTRY : ISTANBUL INM F MPDS NO : 600796032 OFFICIAL NO : TUGS 1721 INM C TLX NO : 427100699 CLASS / NO : NIPPON KAIJI KYOKAI NO; 091743 INM F E-MAIL : [email protected] P&I CLUB : NORTH OF ENGLAND INM C E-MAIL : [email protected] IMO NO : 9527271 ISSC EXP.DATE&NO : 7th SEPT 2014/ 9HO-0818ISSC MANAGER : INCE DENIZCILIK VE TICARET A.S. Fahrettin Kerim Gokay Caddesi Denizciler Is Merkezi Altunizade-Uskudar 34662 ISTANBUL / TURKEY Phone;90-216-6511818, Fax;90-216-6511849, e-mail; [email protected]; Web; www.incedeniz.com BUILDER : IMABARI SHIP BUILDING CO.,LTD.SHIN KASADO DOCKYARD / JAPAN LAUCHED : 02nd MARCH 2009 DELIVERED : 21st APRIL 2009 KIND OF VESSEL : GEARLESS PANAMAX BULK CARRIER TYPE OF VESSEL : FLUSH DECKER TONNAGE : INTERNATIONAL SUEZ PANAMA SUEZ ID : 9339688 GRT. : 39737 41202.88 -- PANAMA ID : -- NRT. : 25754 38360.86 32849 PANAMA TOTAL VOLUME :131407M3 LOA : 224.94 M SUMMER TPC : 66,6 MT AIR DRAFT LOADED : 34.54 M LBP : 217.00 M FWA : 326 mm AIR DRAFT H. BALLAST : 40.33 M BREADTH : 32.26 M LIGHT SHIP : 10205 MT AIR DRAFT L. BALLAST : 41.25 M DEPTH : 19.50 M KEEL TO INMC ANT : 48,68 M DRAFT DEADWEIGHT DIPSLACEMENT FREEBOARD SUMMER : 14.139 M 76619 MT 86824 MT 5.404 M FRESHWATER : 14.465 M 76622 MT 86827 MT 5.078 M TROPICAL : 14.433 M 78579 MT 88784 MT 5.110 M TROPICAL FW : 14.759 M 78537 MT 88742 MT 4.784 M WINTER : 13.845 M 74668 MT 84873 MT 5.698 M WINTER N.ATLANTIC : 13.845 M 74668 MT 84873 MT 5.698 M 1 CUB.M.: 35.315 CUB.FEET GRAIN CAP.