Analytical Solid Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry Around Us an Introduction to Non-Euclidean Geometry
Geometry Around Us An Introduction to Non-Euclidean Geometry Gaurish Korpal (gaurish4math.wordpress.com) National Institute of Science Education and Research, Bhubaneswar 23 April 2016 Science Day Celebration Gaurish Korpal(gaurish4math.wordpress.com) (NISER) Geometry Around Us 23 April 2016 1 / 15 Theorem In any triangle, trisector lines intersect at three points, that are vertices of an equilateral triangle. A. Bogomolny, Morley's Theorem: Proof by R. J. Webster, Interactive Mathematics Miscellany and Puzzle, http://www.cut-the-knot.org/triangle/Morley/Webster.shtml Morley's Miracle Frank Morley (USA) discovered a theorem about triangle in 1899, approximately 2000 years after first theorems about triangle were published by Euclid. Euclid (Egypt) is referred as father of Plane Geometry, often called Euclidean Geometry. Science Day Celebration Gaurish Korpal(gaurish4math.wordpress.com) (NISER) Geometry Around Us 23 April 2016 2 / 15 Morley's Miracle Frank Morley (USA) discovered a theorem about triangle in 1899, approximately 2000 years after first theorems about triangle were published by Euclid. Euclid (Egypt) is referred as father of Plane Geometry, often called Euclidean Geometry. Theorem In any triangle, trisector lines intersect at three points, that are vertices of an equilateral triangle. A. Bogomolny, Morley's Theorem: Proof by R. J. Webster, Interactive Mathematics Miscellany and Puzzle, http://www.cut-the-knot.org/triangle/Morley/Webster.shtml Science Day Celebration Gaurish Korpal(gaurish4math.wordpress.com) (NISER) Geometry Around Us 23 April 2016 2 / 15 Morley's original proof was (published in 1924) stemmed from his results on algebraic curves tangent to a given number of lines. It arose from the consideration of cardioids [(x 2 + y 2 − a2)2 = 4a2((x − a)2 + y 2)]. -

Analytic Geometry
STATISTIC ANALYTIC GEOMETRY SESSION 3 STATISTIC SESSION 3 Session 3 Analytic Geometry Geometry is all about shapes and their properties. If you like playing with objects, or like drawing, then geometry is for you! Geometry can be divided into: Plane Geometry is about flat shapes like lines, circles and triangles ... shapes that can be drawn on a piece of paper Solid Geometry is about three dimensional objects like cubes, prisms, cylinders and spheres Point, Line, Plane and Solid A Point has no dimensions, only position A Line is one-dimensional A Plane is two dimensional (2D) A Solid is three-dimensional (3D) Plane Geometry Plane Geometry is all about shapes on a flat surface (like on an endless piece of paper). 2D Shapes Activity: Sorting Shapes Triangles Right Angled Triangles Interactive Triangles Quadrilaterals (Rhombus, Parallelogram, etc) Rectangle, Rhombus, Square, Parallelogram, Trapezoid and Kite Interactive Quadrilaterals Shapes Freeplay Perimeter Area Area of Plane Shapes Area Calculation Tool Area of Polygon by Drawing Activity: Garden Area General Drawing Tool Polygons A Polygon is a 2-dimensional shape made of straight lines. Triangles and Rectangles are polygons. Here are some more: Pentagon Pentagra m Hexagon Properties of Regular Polygons Diagonals of Polygons Interactive Polygons The Circle Circle Pi Circle Sector and Segment Circle Area by Sectors Annulus Activity: Dropping a Coin onto a Grid Circle Theorems (Advanced Topic) Symbols There are many special symbols used in Geometry. Here is a short reference for you: -
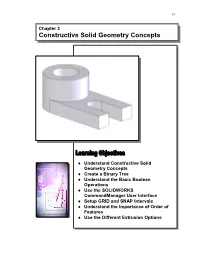
Constructive Solid Geometry Concepts
3-1 Chapter 3 Constructive Solid Geometry Concepts Understand Constructive Solid Geometry Concepts Create a Binary Tree Understand the Basic Boolean Operations Use the SOLIDWORKS CommandManager User Interface Setup GRID and SNAP Intervals Understand the Importance of Order of Features Use the Different Extrusion Options 3-2 Parametric Modeling with SOLIDWORKS Certified SOLIDWORKS Associate Exam Objectives Coverage Sketch Entities – Lines, Rectangles, Circles, Arcs, Ellipses, Centerlines Objectives: Creating Sketch Entities. Rectangle Command ................................................3-10 Boss and Cut Features – Extrudes, Revolves, Sweeps, Lofts Objectives: Creating Basic Swept Features. Base Feature .............................................................3-9 Reverse Direction Option ........................................3-16 Hole Wizard ..............................................................3-20 Dimensions Objectives: Applying and Editing Smart Dimensions. Reposition Smart Dimension ..................................3-11 Feature Conditions – Start and End Objectives: Controlling Feature Start and End Conditions. Reference Guide Reference Extruded Cut, Up to Next .......................................3-25 Associate Certified Constructive Solid Geometry Concepts 3-3 Introduction In the 1980s, one of the main advancements in solid modeling was the development of the Constructive Solid Geometry (CSG) method. CSG describes the solid model as combinations of basic three-dimensional shapes (primitive solids). The -

Historical Introduction to Geometry
i A HISTORICAL INTRODUCTION TO ELEMENTARY GEOMETRY Geometry is an word derived from ancient Greek meaning “earth measure” ( ge = earth or land ) + ( metria = measure ) . Euclid wrote the Elements of geometry between 330 and 320 B.C. It was a compilation of the major theorems on plane and solid geometry presented in an axiomatic style. Near the beginning of the first of the thirteen books of the Elements, Euclid enumerated five fundamental assumptions called postulates or axioms which he used to prove many related propositions or theorems on the geometry of two and three dimensions. POSTULATE 1. Any two points can be joined by a straight line. POSTULATE 2. Any straight line segment can be extended indefinitely in a straight line. POSTULATE 3. Given any straight line segment, a circle can be drawn having the segment as radius and one endpoint as center. POSTULATE 4. All right angles are congruent. POSTULATE 5. (Parallel postulate) If two lines intersect a third in such a way that the sum of the inner angles on one side is less than two right angles, then the two lines inevitably must intersect each other on that side if extended far enough. The circle described in postulate 3 is tacitly unique. Postulates 3 and 5 hold only for plane geometry; in three dimensions, postulate 3 defines a sphere. Postulate 5 leads to the same geometry as the following statement, known as Playfair's axiom, which also holds only in the plane: Through a point not on a given straight line, one and only one line can be drawn that never meets the given line. -

1 Paper Rom the Problem of Solid Geometry (Klaus Volkert, University
Paper Rom The problem of solid geometry (Klaus Volkert, University of Cologne and Archives Henri Poincaré Nancy) Some history In Euclid’s “Elements” solid geometry is studied in books XI to XIII. Here Euclid gives a systematic treatment of geometry in space focussing on polyhedra. He discusses basic notions like “being parallel” and “being orthogonal”, gives some simple constructions (like the perpendicular from a point to a plane), discusses the problem of creating a vertex and gives some hints on volume using equidecomposability (in modern terms). Book XIII is devoted to the construction of the five Platonic solids and the proof that there are no more regular polyhedra. Certainly there were some gaps in Euclid’s treatment but not much work was done on solid geometry until the times of Kepler. In particular there was no conceptual analysis of solids – that is a decomposition of them into units of lower dimensions: they were constructed but not analyzed. Euler (1750) was very surprised than he noticed that he was the first to do so. In his “Harmonice mundi” Kepler formulated the theory of Archimedean solids, a more or less new class of semi-regular polyhedra. Picturing polyhedra was a favourite occupation of artists since the introduction of perspective but without a theoretical interest. In Euclid’s “Elements” there is a strict separation between plane geometry (books I to IV, VI) and solid geometry (books XI to XIII) [of course the results of plane geometry are used also in solid geometry and there are also results of plane geometry in the books dedicated to stereometry – in particular on the regular pentagon] which marked the development afterwards. -

Tilted Planes and Curvature in Three-Dimensional Space: Explorations of Partial Derivatives
Tilted Planes and Curvature in Three-Dimensional Space: Explorations of Partial Derivatives By Andrew Grossfield, Ph. D., P. E. Abstract Many engineering students encounter and algebraically manipulate partial derivatives in their fluids, thermodynamics or electromagnetic wave theory courses. However it is possible that unless these students were properly introduced to these symbols, they may lack the insight that could be obtained from a geometric or visual approach to the equations that contain these symbols. We accept the approach that just as the direction of a curve at a point in two-dimensional space is described by the slope of the straight line tangent to the curve at that point, the orientation of a surface at a point in 3-dimensional space is determined by the orientation of the plane tangent to the surface at that point. A straight line has only one direction described by the same slope everywhere along its length; a tilted plane has the same orientation everywhere but has many slopes at each point. In fact the slope in almost every direction leading away from a point is different. How do we conceive of these differing slopes and how can they be evaluated? We are led to conclude that the derivative of a multivariable function is the gradient vector, and that it is wrong and misleading to define the gradient in terms of some kind of limiting process. This approach circumvents the need for all the unnecessary delta-epsilon arguments about obvious results, while providing visual insight into properties of multi-variable derivatives and differentials. This paper provides the visual connection displaying the remarkably simple and beautiful relationships between the gradient, the directional derivatives and the partial derivatives. -
SOLID GEOMETRY CAMBRIDGE UNIVERSITY PRESS Eon^On: FETTER LANE, E.G
QA UC-NRLF 457 ^B 557 i35 ^ Ml I 9^^ soLiTf (itlOMK'l'RV BY C. GODFREY, HEAD M STER CF THE ROY I ^1 f i ! i-ORMERI.Y ; EN ;R MAI :: \: i^;. ; \MNCHEST1-R C(.1J,E(;E an:; \\\ A. SIDDON , MA :^1AN r MASTER .AT ..\:--:: : ', l-ELLi)V* i OF JESL'S COI.' E, CAMf. ^'ambridge : at tlie 'Jniversity Press 191 1 IN MEMORIAM FLORIAN CAJORI Q^^/ff^y^-^ SOLID GEOMETRY CAMBRIDGE UNIVERSITY PRESS Eon^on: FETTER LANE, E.G. C. F. CLAY, Manager (fFtjinfturgi) : loo, PRINCES STREET iSerlin: A. ASHER AND CO. ILjipjig: F. A. BROCKHAUS ^tia lork: G. P. PUTNAM'S SONS iSombas anU Calcutta: MACMILLAN AND CO., Ltd. A /I rights resei'ved SOLID GEOMETRY BY C. GODFREY, M.V.O. ; M.A. w HEAD MASTER OF THE ROYAL NAVAL COLLEGE, OSBORNE FORMERLY SENIOR MATHEMATICAL MASTER AT WINCHESTER COLLEGE AND A. W. SIDDONS, M.A. ASSISTANT MASTER AT HARROW SCHOOL LATE FELLOW OF JESUS COLLEGE, CAMBRIDGE Cambridge : at the University Press 191 1 Camfariljge: PRINTED BY JOHN CLAY, M.A. AT THE UNIVERSITY PRESS. CAJORl PREFACE "It is a great defect in most school courses of geometry " that they are entirely confined to two dimensions. Even *' if solid geometry in the usual sense is not attempted, every ''occasion should be taken to liberate boys' minds from "what becomes the tyranny of paper But beyond this "it should be possible, if the earlier stages of the plane "geometry work are rapidly and effectively dealt with as "here suggested, to find time for a short course of solid " geometry. -

(T) — ABCD a Sphere (Q) Whose Center Is the Monge P
ON THE THEORY OF THE TETRAHEDRON N. A. COURT I. DEFINITION. We associate with the general tetrahedron (T) — ABCD a sphere (Q) whose center is the Monge point M of (T) and the square of whose radius is (a) q2 = (MO2 - R2)/3, where O and R are the center and the radius of the circumsphere (0) of (T). In what follows, a number of propositions regarding the sphere (<2) will be established and it will be shown that from the properties of (Q) may be derived, as special cases, properties of the polar sphere (H) of the orthocentric tetrahedron (Th). For want of a better name we shall refer to (Q) as the "quasi-polar" sphere of the general tetrahedron (T). The expression M02 — R2 is the power of the Monge point M of (T) for the sphere (O). THEOREM 1. The square of the radius of the quasi-polar sphere of the general tetrahedron is equal to one-third of the power of the Monge point of the tetrahedron f or its circumsphere. The sphere (Q) is real, a point sphere, or imaginary according as MO is greater than, equal to, or smaller than R. Moreover, we have MO<2R, for the mid-point of MO is the centroid G of (T), and G necessarily lies within the sphere (0). COROLLARY. In an orthocentric tetrahedron (Th) the Monge point coincides with the orthocenter H, and the above properties of (Q) are valid for the polar sphere (H) of (Th).1 The Monge point M of (T) is a center of similitude of the circum* sphere (0) and the twelve point sphere (L) of (T)2 hence M is the center of a sphere of antisimilitude of (0) and (L), that is, a sphere with respect to which the spheres (O) and (L) are inverse of one an other. -

Solid Geometry Introduction
Copyright © 2009 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved. Solid Geometry Introduction Creating and Editing Solid Geometry Copyright © 2009 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved. Solid Geometry: What is it? A solid is: • A geometric entity that define a 3-dimensional volume • Same as solids used in most CAD programs Used in functions where defining a volume is required •Hexameshing (3D : solid map :volume sub-panel) •Tetrameshing(3D : tetramesh : volume tetra sub-panel) Especially helpful when dividing a part into multiple volumes • A part can be divided into multiple, connected solids • The connection between adjacent solids (topology) can maintain the connectivity of mesh • Aids visualization when dividing a part into simple, mappable regions (used in hexa meshing) Copyright © 2009 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved. Solid Geometry: 3D Topology Example: 2 connected solids in topology display Solid faces Edges • Selectable as surfaces • Selectable as lines • Bounding Faces • Shared Edges • Green • Green • Belong to 1 solid • Belong to 2 adjacent faces of 1 solid • Partition Faces •Yellow • Non-manifold Edges • Shared between connected solids • Yellow • Belong to: • A partition face - OR - • 2 solid faces Fixed Points and 1+ surfaces • Selectable as points • Lie at the ends of edges Copyright © 2009 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved. Solid Geometry: Tools for Creating Solids Import • Pull-down -
Euclid of Alexandria the Writer of the Elements
Euclid of Alexandria The Writer of the Elements OLLI Summer 2014 1 BIO • Little is known of Euclid's life. According to Proclus (410-485 A.D.) in his Commentary on the First Book of Euclid's Elements , he came after the first pupils of Plato and lived during the reign of Ptolemy I (306-283 B.C.). Pappus of Alexandria (fl. c. 320 A.D.) in his Collection states that Apollonius of Perga (262-190 B.C.) studied for a long while in that city under the pupils of Euclid. Thus it is generally accepted that Euclid flourished at Alexandria in around 300 B.C. and established a mathematical school there. 2 Ptolemy I (323 – 285 BC) • Upon the death of Alexander the Great in 323 BC, the throne of Egypt fell to Ptolemy one of Alexander’s trusted commanders • It is said that Ptolemy once asked Euclid if there was in geometry any shorter way than that of the Elements. Euclid replied that there was no royal road to geometry. • From the time of Archimedes onwards, the Greeks referred to Euclid as the writer of the Elements instead of using his name. 3 Euclid’s Elements (300 BC) The greatest mathematical textbook of all time • Book I. The fundamentals of geometry: theories of triangles, parallels, and area. • Book II. Geometric algebra. • Book III. Theory of circles. • Book IV. Constructions for inscribed and circumscribed figures. • Book V. Theory of abstract proportions. • Book VI. Similar figures and proportions in geometry. • Book VII. Fundamentals of number theory. • Book VIII. Continued proportions in number theory. -

Treatise on Conic Sections
OF CALIFORNIA LIBRARY OF THE UNIVERSITY OF CALIFORNIA fY OF CALIFORNIA LIBRARY OF THE UNIVERSITY OF CALIFORNIA 9se ? uNliEHSITY OF CUIFORHU LIBRARY OF THE UNIVERSITY OF CUIfORHlA UNIVERSITY OF CALIFORNIA LIBRARY OF THE UNIVERSITY OF CALIFORNIA APOLLONIUS OF PERGA TREATISE ON CONIC SECTIONS. UonDon: C. J. CLAY AND SONS, CAMBRIDGE UNIVERSITY PRESS WAREHOUSE, AVE RIARIA LANE. ©Inaooh): 263, ARGYLE STREET. lLftp>is: P. A. BROCKHAUS. 0fto goTit: MACMILLAN AND CO. ^CNIVERSITT• adjViaMai/u Jniuppus 9lnlMus%^craticus,naufmato cum ejcctus aa UtJ ammaScrudh Geainetncn fJimmta defer,pta, cxcUnwimJIe cnim veiiigia video. coMXiXcs ita Jiatur^hcnc fperemus,Hominnm APOLLONIUS OF PEEGA TEEATISE ON CONIC SECTIONS EDITED IN MODERN NOTATION WITH INTRODUCTIONS INCLUDING AN ESSAY ON THE EARLIER HISTORY OF THE SUBJECT RV T. L. HEATH, M.A. SOMETIME FELLOW OF TRINITY COLLEGE, CAMBRIDGE. ^\€$ .•(', oh > , ' . Proclub. /\b1 txfartl PRINTED BY J. AND C. F. CLAY, AT THE UNIVERSITY PRESS. MANIBUS EDMUNDI HALLEY D. D. D. '" UNIVERSITT^ PREFACE. TT is not too much to say that, to the great majority of -*- mathematicians at the present time, Apollonius is nothing more than a name and his Conies, for all practical purposes, a book unknown. Yet this book, written some twenty-one centuries ago, contains, in the words of Chasles, " the most interesting properties of the conies," to say nothing of such brilliant investigations as those in which, by purely geometrical means, the author arrives at what amounts to the complete determination of the evolute of any conic. The general neglect of the " great geometer," as he was called by his contemporaries on account of this very work, is all the more remarkable from the contrast which it affords to the fate of his predecessor Euclid ; for, whereas in this country at least the Elements of Euclid are still, both as regards their contents and their order, the accepted basis of elementary geometry, the influence of Apollonius upon modern text-books on conic sections is, so far as form and method are concerned, practically nil. -

Solid Geometry1
Solid Geometry Solid Geometry is the geometry of three-dimensional space, the kind of space we live in. Three Dimensions It is called three-dimensional or 3D because there are three dimensions: width, depth and height. There are two main types of solids, "Polyhedra", and "Non- Polyhedra": Polyhedra A polyhedron is a solid made of flat surfaces. A polyhedron is a solid with flat faces (from Greek poly- meaning "many" and -edron meaning "face"). Each flat surface (or "face") is a polygon. So, to be a polyhedron there should be no curved surfaces. Examples of Polyhedra: Platonic Solids Prisms Pyramids Non-Polyhedra Some solids have curved surfaces or a mix of curved and flat surfaces (so they aren't polyhedra). Examples: Sphere Torus Cylinder Cone Properties Solids have properties (special things about them), such as: Volume (think of how much water it could hold) Surface area (think of the area you would have to paint) Platonic Solids There are five platonic solids. For each solid there are two printable nets (with and without tabs). These nets can be printed onto a piece of card. You can then make your own platonic solids by cutting them out and taping the edges together. Tetrahedron 4 Faces 4 Vertices 6 Edges Tetrahedron Net Cube 6 Faces 8 Vertices 12 Edges Cube Net Octahedron 8 Faces 6 Vertices 12 Edges Octahedron Net Prisms A prism has the same cross section all along its length ! These are all Prisms: Square Prism: Cross-Section: Cube: Triangular Prism: Cross-Section : Pentagonal Prism: Cross-Section: Regular and Irregular Prisms Here is an example of an Irregular Prism: Irregular Pentagonal Prism: Cross-Section: Cuboids and Rectangular Prisms A cuboid is a box-shaped object.