Absence of Mixing in Area-Preserving Flows on Surfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AR 96 Covers/Contents
ICTP FULL TECHNICAL REPORT 2018 INTRODUCTION This document is the full technical report of ICTP for the year 2018. For the non-technical description of 2018 highlights, please see the printed “ICTP: A Year in Review” publication. 2 ICTP Full Technical Report 2018 CONTENTS Research High Energy, Cosmology and Astroparticle Physics (HECAP) ........................................................................ 7 Director's Research Group – String Phenomenology and Cosmology ...................................... 30 Condensed Matter and Statistical Physics (CMSP)............................................................................................ 32 Sustainable Energy Synchrotron Radiation Related Theory Mathematics ........................................................................................................................................................................ 63 Earth System Physics (ESP) ......................................................................................................................................... 71 Applied Physics Multidisciplinary Laboratory (MLab) ....................................................................................................... 97 Telecommunications/ICT for Development Laboratory (T/ICT4D) ....................................... 108 Medical Physics ................................................................................................................................................. 113 Fluid Dynamics .................................................................................................................................................. -

“To Be a Good Mathematician, You Need Inner Voice” ”Огонёкъ” Met with Yakov Sinai, One of the World’S Most Renowned Mathematicians
“To be a good mathematician, you need inner voice” ”ОгонёкЪ” met with Yakov Sinai, one of the world’s most renowned mathematicians. As the new year begins, Russia intensifies the preparations for the International Congress of Mathematicians (ICM 2022), the main mathematical event of the near future. 1966 was the last time we welcomed the crème de la crème of mathematics in Moscow. “Огонёк” met with Yakov Sinai, one of the world’s top mathematicians who spoke at ICM more than once, and found out what he thinks about order and chaos in the modern world.1 Committed to science. Yakov Sinai's close-up. One of the most eminent mathematicians of our time, Yakov Sinai has spent most of his life studying order and chaos, a research endeavor at the junction of probability theory, dynamical systems theory, and mathematical physics. Born into a family of Moscow scientists on September 21, 1935, Yakov Sinai graduated from the department of Mechanics and Mathematics (‘Mekhmat’) of Moscow State University in 1957. Andrey Kolmogorov’s most famous student, Sinai contributed to a wealth of mathematical discoveries that bear his and his teacher’s names, such as Kolmogorov-Sinai entropy, Sinai’s billiards, Sinai’s random walk, and more. From 1998 to 2002, he chaired the Fields Committee which awards one of the world’s most prestigious medals every four years. Yakov Sinai is a winner of nearly all coveted mathematical distinctions: the Abel Prize (an equivalent of the Nobel Prize for mathematicians), the Kolmogorov Medal, the Moscow Mathematical Society Award, the Boltzmann Medal, the Dirac Medal, the Dannie Heineman Prize, the Wolf Prize, the Jürgen Moser Prize, the Henri Poincaré Prize, and more. -

CURRICULUM VITAE November 2007 Hugo J
CURRICULUM VITAE November 2007 Hugo J. Woerdeman Professor and Department Head Office address: Home address: Department of Mathematics 362 Merion Road Drexel University Merion, PA 19066 Philadelphia, PA 19104 Phone: (610) 664-2344 Phone: (215) 895-2668 Fax: (215) 895-1582 E-mail: [email protected] Academic employment: 2005– Department of Mathematics, Drexel University Professor and Department Head (January 2005 – Present) 1989–2004 Department of Mathematics, College of William and Mary, Williamsburg, VA. Margaret L. Hamilton Professor of Mathematics (August 2003 – December 2004) Professor (July 2001 – December 2004) Associate Professor (September 1995 – July 2001) Assistant Professor (August 1989 – August 1995; on leave: ’89/90) 2002-03 Department of Mathematics, K. U. Leuven, Belgium, Visiting Professor Post-doctorate: 1989– 1990 University of California San Diego, Advisor: J. W. Helton. Education: Ph. D. degree in mathematics from Vrije Universiteit, Amsterdam, 1989. Thesis: ”Matrix and Operator Extensions”. Advisor: M. A. Kaashoek. Co-advisor: I. Gohberg. Doctoraal (equivalent of M. Sc.), Vrije Universiteit, Amsterdam, The Netherlands, 1985. Thesis: ”Resultant Operators and the Bezout Equation for Analytic Matrix Functions”. Advisor: L. Lerer Current Research Interests: Modern Analysis: Operator Theory, Matrix Analysis, Optimization, Signal and Image Processing, Control Theory, Quantum Information. Editorship: Associate Editor of SIAM Journal of Matrix Analysis and Applications. Guest Editor for a Special Issue of Linear Algebra and -

Your Project Title
Curriculum vitae Alfonso Sorrentino Curriculum Vitae • Personal Information Full Name: Alfonso Sorrentino. Citizenship: Italian. Researcher unique identifier (ORCID): 0000-0002-5680-2999. Contact Information: Address: Dipartimento di Matematica, Universit`adegli Studi di Roma \Tor Vergata" Via della Ricerca Scientifica 1, 00133 Rome (Italy). Phone: (+39) 06 72594663 Email: [email protected] Website: http://www.mat.uniroma2.it/∼sorrenti • Research Interests Hamiltonian and Lagrangian systems: Aubry-Mather-Ma~n´etheory, KAM theory, weak KAM theory, Integrable systems, geodesic flows, Stability and Instability. Twist maps and symplectic maps: low-dimensional (topological) dynamics, Aubry-Mather theory. Billiards: dynamics, integrability, spectral properties, rigidity phenomena. Dissipative systems: conformally symplectic Aubry-Mather theory. Hamilton-Jacobi equation: Homogenization, Symplectic Homogenization, Hamilton-Jacobi on net- works and ramified spaces. Symplectic and contact geometry/topology: general theory, Hofer and Viterbo geometries, applica- tions to dynamics. • Education 2004 - 2008: Ph.D. in Mathematics, Princeton University (USA). Thesis Title: On the structure of action-minimizing sets for Lagrangian systems. Advisor: Prof. John N. Mather. Degree Committee: John N. Mather (President), Elon Lindenstrauss,Yakov Sinai and Bo0az Klartag. 2003 - 2004: M.A. in Mathematics, Princeton University (USA). Exam Committee: John Mather (President), Alice Chang and J´anosKoll´ar. 1998 - 2003: Laurea degree in Mathematics, Universit`adegli Studi \Roma Tre". Thesis Title: On smooth quasi-periodic solutions of Hamiltonian Systems. Supervisor: Prof. Luigi Chierchia. Evaluation: 110/110 cum laude. • Academic Positions 2014 - present: Associate Professor in Mathematical Analysis (01/A3, MAT/05) (tenured position) at Dipartimento di Matematica, Universit`adegli Studi di Roma \Tor Vergata", Rome (Italy). 2012 - 2014: Researcher in Mathematical Analysis MAT/05 (tenured position) at Dipartimento di Matematica e Fisica, Universit`adegli Studi \Roma Tre", Rome (Italy). -

Ergodic Theory Plays a Key Role in Multiple Fields Steven Ashley Science Writer
CORE CONCEPTS Core Concept: Ergodic theory plays a key role in multiple fields Steven Ashley Science Writer Statistical mechanics is a powerful set of professor Tom Ward, reached a key milestone mathematical tools that uses probability the- in the early 1930s when American mathema- ory to bridge the enormous gap between the tician George D. Birkhoff and Austrian-Hun- unknowable behaviors of individual atoms garian (and later, American) mathematician and molecules and those of large aggregate sys- and physicist John von Neumann separately tems of them—a volume of gas, for example. reconsidered and reformulated Boltzmann’ser- Fundamental to statistical mechanics is godic hypothesis, leading to the pointwise and ergodic theory, which offers a mathematical mean ergodic theories, respectively (see ref. 1). means to study the long-term average behavior These results consider a dynamical sys- of complex systems, such as the behavior of tem—whetheranidealgasorothercomplex molecules in a gas or the interactions of vi- systems—in which some transformation func- brating atoms in a crystal. The landmark con- tion maps the phase state of the system into cepts and methods of ergodic theory continue its state one unit of time later. “Given a mea- to play an important role in statistical mechan- sure-preserving system, a probability space ics, physics, mathematics, and other fields. that is acted on by the transformation in Ergodicity was first introduced by the a way that models physical conservation laws, Austrian physicist Ludwig Boltzmann laid Austrian physicist Ludwig Boltzmann in the what properties might it have?” asks Ward, 1870s, following on the originator of statisti- who is managing editor of the journal Ergodic the foundation for modern-day ergodic the- cal mechanics, physicist James Clark Max- Theory and Dynamical Systems.Themeasure ory. -

Spring 2014 Fine Letters
Spring 2014 Issue 3 Department of Mathematics Department of Mathematics Princeton University Fine Hall, Washington Rd. Princeton, NJ 08544 Department Chair’s letter The department is continuing its period of Assistant to the Chair and to the Depart- transition and renewal. Although long- ment Manager, and Will Crow as Faculty The Wolf time faculty members John Conway and Assistant. The uniform opinion of the Ed Nelson became emeriti last July, we faculty and staff is that we made great Prize for look forward to many years of Ed being choices. Peter amongst us and for John continuing to hold Among major faculty honors Alice Chang Sarnak court in his “office” in the nook across from became a member of the Academia Sinica, Professor Peter Sarnak will be awarded this the common room. We are extremely Elliott Lieb became a Foreign Member of year’s Wolf Prize in Mathematics. delighted that Fernando Coda Marques and the Royal Society, John Mather won the The prize is awarded annually by the Wolf Assaf Naor (last Fall’s Minerva Lecturer) Brouwer Prize, Sophie Morel won the in- Foundation in the fields of agriculture, will be joining us as full professors in augural AWM-Microsoft Research prize in chemistry, mathematics, medicine, physics, Alumni , faculty, students, friends, connect with us, write to us at September. Algebra and Number Theory, Peter Sarnak and the arts. The award will be presented Our finishing graduate students did very won the Wolf Prize, and Yasha Sinai the by Israeli President Shimon Peres on June [email protected] well on the job market with four win- Abel Prize. -

Sinai Awarded 2014 Abel Prize
Sinai Awarded 2014 Abel Prize The Norwegian Academy of Sci- Sinai’s first remarkable contribution, inspired ence and Letters has awarded by Kolmogorov, was to develop an invariant of the Abel Prize for 2014 to dynamical systems. This invariant has become Yakov Sinai of Princeton Uni- known as the Kolmogorov-Sinai entropy, and it versity and the Landau Insti- has become a central notion for studying the com- tute for Theoretical Physics plexity of a system through a measure-theoretical of the Russian Academy of description of its trajectories. It has led to very Sciences “for his fundamen- important advances in the classification of dynami- tal contributions to dynamical cal systems. systems, ergodic theory, and Sinai has been at the forefront of ergodic theory. mathematical physics.” The He proved the first ergodicity theorems for scat- Photo courtesy of Princeton University Mathematics Department. Abel Prize recognizes contribu- tering billiards in the style of Boltzmann, work tions of extraordinary depth he continued with Bunimovich and Chernov. He Yakov Sinai and influence in the mathemat- constructed Markov partitions for systems defined ical sciences and has been awarded annually since by iterations of Anosov diffeomorphisms, which 2003. The prize carries a cash award of approxi- led to a series of outstanding works showing the mately US$1 million. Sinai received the Abel Prize power of symbolic dynamics to describe various at a ceremony in Oslo, Norway, on May 20, 2014. classes of mixing systems. With Ruelle and Bowen, Sinai discovered the Citation notion of SRB measures: a rather general and Ever since the time of Newton, differential equa- distinguished invariant measure for dissipative tions have been used by mathematicians, scientists, systems with chaotic behavior. -

Prizes and Awards Session
PRIZES AND AWARDS SESSION Wednesday, July 12, 2021 9:00 AM EDT 2021 SIAM Annual Meeting July 19 – 23, 2021 Held in Virtual Format 1 Table of Contents AWM-SIAM Sonia Kovalevsky Lecture ................................................................................................... 3 George B. Dantzig Prize ............................................................................................................................. 5 George Pólya Prize for Mathematical Exposition .................................................................................... 7 George Pólya Prize in Applied Combinatorics ......................................................................................... 8 I.E. Block Community Lecture .................................................................................................................. 9 John von Neumann Prize ......................................................................................................................... 11 Lagrange Prize in Continuous Optimization .......................................................................................... 13 Ralph E. Kleinman Prize .......................................................................................................................... 15 SIAM Prize for Distinguished Service to the Profession ....................................................................... 17 SIAM Student Paper Prizes .................................................................................................................... -

BILLIARDS in REGULAR 2N-GONS and the SELF-DUAL INDUCTION
BILLIARDS IN REGULAR 2n-GONS AND THE SELF-DUAL INDUCTION SEBASTIEN´ FERENCZI Abstract. We build a coding of the trajectories of billiards in regular 2n-gons, similar but different from the one in [16], by applying the self-dual induction [9] to the underlying one-parameter family of n-interval exchange transformations. This allows us to show that, in that family, for n = 3 non-periodicity is enough to guarantee weak mixing, and in some cases minimal self-joinings, and for every n we can build examples of n-interval exchange transformations with weak mixing, which are the first known explicitly for n > 6. In [16], see also [15], John Smillie and Corinna Ulcigrai develop a rich and original theory of billiards in the regular octagons, and more generally of billiards in the regular 2n-gons, first studied by Veech [17]: their aim is to build explicitly the symbolic trajectories, which generalize the famous Sturmian sequences (see for example [1] among a huge literature), and they achieve it through a new renormalization process which generalizes the usual continued fraction algorithm. In the present shorter paper, we show that similar results, with new consequences, can be obtained by using an existing, though recent, theory, the self-dual in- duction on interval exchange transformations. As in [16], we define a trajectory of a billiard in a regular 2n-gon as a path which starts in the interior of the polygon, and moves with constant velocity until it hits the boundary, then it re-enters the polygon at the corresponding point of the parallel side, and continues travelling with the same velocity; we label each pair of parallel sides with a letter of the alphabet (A1; :::An), and read the labels of the pairs of parallel sides crossed by the trajectory as time increases; studying these trajectories is known to be equivalent to studying the trajectories of a one-parameter family of n-interval exchange transformations, and to this family we apply a slightly modified version of the self-dual induction defined in [9]. -

The Legacy of Norbert Wiener: a Centennial Symposium
http://dx.doi.org/10.1090/pspum/060 Selected Titles in This Series 60 David Jerison, I. M. Singer, and Daniel W. Stroock, Editors, The legacy of Norbert Wiener: A centennial symposium (Massachusetts Institute of Technology, Cambridge, October 1994) 59 William Arveson, Thomas Branson, and Irving Segal, Editors, Quantization, nonlinear partial differential equations, and operator algebra (Massachusetts Institute of Technology, Cambridge, June 1994) 58 Bill Jacob and Alex Rosenberg, Editors, K-theory and algebraic geometry: Connections with quadratic forms and division algebras (University of California, Santa Barbara, July 1992) 57 Michael C. Cranston and Mark A. Pinsky, Editors, Stochastic analysis (Cornell University, Ithaca, July 1993) 56 William J. Haboush and Brian J. Parshall, Editors, Algebraic groups and their generalizations (Pennsylvania State University, University Park, July 1991) 55 Uwe Jannsen, Steven L. Kleiman, and Jean-Pierre Serre, Editors, Motives (University of Washington, Seattle, July/August 1991) 54 Robert Greene and S. T. Yau, Editors, Differential geometry (University of California, Los Angeles, July 1990) 53 James A. Carlson, C. Herbert Clemens, and David R. Morrison, Editors, Complex geometry and Lie theory (Sundance, Utah, May 1989) 52 Eric Bedford, John P. D'Angelo, Robert E. Greene, and Steven G. Krantz, Editors, Several complex variables and complex geometry (University of California, Santa Cruz, July 1989) 51 William B. Arveson and Ronald G. Douglas, Editors, Operator theory/operator algebras and applications (University of New Hampshire, July 1988) 50 James Glimm, John Impagliazzo, and Isadore Singer, Editors, The legacy of John von Neumann (Hofstra University, Hempstead, New York, May/June 1988) 49 Robert C. Gunning and Leon Ehrenpreis, Editors, Theta functions - Bowdoin 1987 (Bowdoin College, Brunswick, Maine, July 1987) 48 R. -
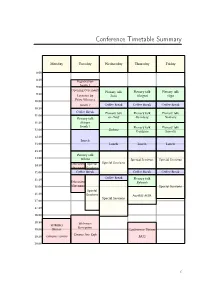
Conference Timetable Summary
Conference Timetable Summary Monday Tuesday Wednesday Thursday Friday 8:00 8:30 Registration 9:00 South 1 Opening Ceremony Plenary talk Plenary talk Plenary talk 9:30 Lectures by Joshi Ulcigrai Giga 10:00 Prize Winners South 1 Coffee Break Coffee Break Coffee Break 10:30 Coffee Break Plenary talk Plenary talk Plenary talk 11:00 Plenary talk an Huef Steinberg Norbury 11:30 Krieger South 1 Plenary talk Plenary talk 12:00 Debate Trudgian Samotij 12:30 Lunch 13:00 Lunch Lunch Lunch 13:30 Plenary talk 14:00 Sikora Special Sessions Special Sessions Special Sessions 14:30 Education Special Afternoon Sessions 15:00 Coffee Break Coffee Break Coffee Break Coffee Break 15:30 Plenary talk Education Rylands 16:00 Afternoon Special Sessions Special 16:30 Sessions AustMS AGM Special Sessions 17:00 17:30 18:00 18:30 Welcome WIMSIG Reception 19:00 Dinner Conference Dinner Cinque Lire Cafe 19:30 Campus Centre MCG 20:00 1 Contents Foreword 4 Conference Sponsors 5 Conference Program 6 Education Afternoon 7 Session 1: Plenary Lectures 8 Special Sessions 2. Algebra 9 3. Applied and Industrial Mathematics 10 4. Category Theory 11 5. Combinatorics and Graph Theory 12 6. Computational Mathematics 14 7. Dynamical Systems and Ergodic Theory 15 8. Financial mathematics 16 9. Functional Analysis, Operator Algebra, Non-commutative Geometry 17 10. Geometric Analysis and Partial Differential Equations 18 11. Geometry including Differential Geometry 20 12. Harmonic and Semiclassical Analysis 21 13. Inclusivity, diversity, and equity in mathematics 22 14. Mathematical Biology 23 15. Mathematics Education 24 16. Mathematical Physics, Statistical Mechanics and Integrable systems 25 17. -

Full List of Publications Doctoral Dissertation Mathematical Papers
Full list of publications Martin Raussen Doctoral dissertation M. Raussen. Contributions to directed algebraic topology – with inspirations from concurrency theory. Aalborg University, Department of Mathematical Sciecnes, 2014. xv+63 pp. Short version Full version Mathematical Papers In reverse chronological order, based on Mathematical Reviews and Zentralblatt fur¨ Mathe- matik und ihre Grenzgebiete: [1] M. Raussen and K. Ziemianski.´ Homology of spaces of directed paths on euclidean cubical complexes. J. Homotopy Relat. Struct., 9(1):67–84, 2014. [2] M. Raussen. Simplicial models for trace spaces II: General higher-dimensional au- tomata. Algebr. Geom. Topol., 12(3):1745–1765, 2012. [3] M. Raussen. Execution spaces for simple higher dimensional automata. Appl. Algebra Engrg. Comm. Comput., 23:59–84, 2012. [4] L. Fajstrup, E.´ Goubault, E. Haucourt, S. Mimram, and M. Raussen. Trace Spaces: An Efficient New Technique for State-Space Reduction. In H. Seidl, editor, Programming Languages and Systems, volume 7211 of Lecture Notes in Computer Sci., pages 274–294. ESOP 2012, Springer-Verlag, 2012. [5] M. Raussen. Simplicial models for trace spaces. Algebr. Geom. Topol., 10:1683–1714, 2010. [6] M. Raussen. Trace spaces in a pre-cubical complex. Topology Appl., 156(9):1718–1728, 2009. [7] M. Raussen. Reparametrizations with given stop data. J. Homotopy Relat. Struct., 4(1):1– 5, 2009. [8] U. Fahrenberg and M. Raussen. Reparametrizations of continuous paths. J. Homotopy Relat. Struct., 2(2):93–117, 2007. [9] M. Raussen. Invariants of directed spaces. Appl. Categ. Struct., 15(4):355–386, 2007. [10] R. Wisniewski and M. Raussen. Geometric analysis of nondeterminacy in dynamical systems.