Surface Areas of Pyramids and Cones 617
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE GEOMETRY of PYRAMIDS One of the More Interesting Solid
THE GEOMETRY OF PYRAMIDS One of the more interesting solid structures which has fascinated individuals for thousands of years going all the way back to the ancient Egyptians is the pyramid. It is a structure in which one takes a closed curve in the x-y plane and connects straight lines between every point on this curve and a fixed point P above the centroid of the curve. Classical pyramids such as the structures at Giza have square bases and lateral sides close in form to equilateral triangles. When the closed curve becomes a circle one obtains a cone and this cone becomes a cylindrical rod when point P is moved to infinity. It is our purpose here to discuss the properties of all N sided pyramids including their volume and surface area using only elementary calculus and geometry. Our starting point will be the following sketch- The base represents a regular N sided polygon with side length ‘a’ . The angle between neighboring radial lines r (shown in red) connecting the polygon vertices with its centroid is θ=2π/N. From this it follows, by the law of cosines, that the length r=a/sqrt[2(1- cos(θ))] . The area of the iscosolis triangle of sides r-a-r is- a a 2 a 2 1 cos( ) A r 2 T 2 4 4 (1 cos( ) From this we have that the area of the N sided polygon and hence the pyramid base will be- 2 2 1 cos( ) Na A N base 2 4 1 cos( ) N 2 It readily follows from this result that a square base N=4 has area Abase=a and a hexagon 2 base N=6 yields Abase= 3sqrt(3)a /2. -

1 Lifts of Polytopes
Lecture 5: Lifts of polytopes and non-negative rank CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Lifts of polytopes 1.1 Polytopes and inequalities Recall that the convex hull of a subset X n is defined by ⊆ conv X λx + 1 λ x0 : x; x0 X; λ 0; 1 : ( ) f ( − ) 2 2 [ ]g A d-dimensional convex polytope P d is the convex hull of a finite set of points in d: ⊆ P conv x1;:::; xk (f g) d for some x1;:::; xk . 2 Every polytope has a dual representation: It is a closed and bounded set defined by a family of linear inequalities P x d : Ax 6 b f 2 g for some matrix A m d. 2 × Let us define a measure of complexity for P: Define γ P to be the smallest number m such that for some C s d ; y s ; A m d ; b m, we have ( ) 2 × 2 2 × 2 P x d : Cx y and Ax 6 b : f 2 g In other words, this is the minimum number of inequalities needed to describe P. If P is full- dimensional, then this is precisely the number of facets of P (a facet is a maximal proper face of P). Thinking of γ P as a measure of complexity makes sense from the point of view of optimization: Interior point( methods) can efficiently optimize linear functions over P (to arbitrary accuracy) in time that is polynomial in γ P . ( ) 1.2 Lifts of polytopes Many simple polytopes require a large number of inequalities to describe. -

Geometry © 2000 Springer-Verlag New York Inc
Discrete Comput Geom OF1–OF15 (2000) Discrete & Computational DOI: 10.1007/s004540010046 Geometry © 2000 Springer-Verlag New York Inc. Convex and Linear Orientations of Polytopal Graphs J. Mihalisin and V. Klee Department of Mathematics, University of Washington, Box 354350, Seattle, WA 98195-4350, USA {mihalisi,klee}@math.washington.edu Abstract. This paper examines directed graphs related to convex polytopes. For each fixed d-polytope and any acyclic orientation of its graph, we prove there exist both convex and concave functions that induce the given orientation. For each combinatorial class of 3-polytopes, we provide a good characterization of the orientations that are induced by an affine function acting on some member of the class. Introduction A graph is d-polytopal if it is isomorphic to the graph G(P) formed by the vertices and edges of some (convex) d-polytope P. As the term is used here, a digraph is d-polytopal if it is isomorphic to a digraph that results when the graph G(P) of some d-polytope P is oriented by means of some affine function on P. 3-Polytopes and their graphs have been objects of research since the time of Euler. The most important result concerning 3-polytopal graphs is the theorem of Steinitz [SR], [Gr1], asserting that a graph is 3-polytopal if and only if it is planar and 3-connected. Also important is the related fact that the combinatorial type (i.e., the entire face-lattice) of a 3-polytope P is determined by the graph G(P). Steinitz’s theorem has been very useful in studying the combinatorial structure of 3-polytopes because it makes it easy to recognize the 3-polytopality of a graph and to construct graphs that represent 3-polytopes without producing an explicit geometric realization. -

Lateral and Surface Area of Right Prisms 1 Jorge Is Trying to Wrap a Present That Is in a Box Shaped As a Right Prism
CHAPTER 11 You will need Lateral and Surface • a ruler A • a calculator Area of Right Prisms c GOAL Calculate lateral area and surface area of right prisms. Learn about the Math A prism is a polyhedron (solid whose faces are polygons) whose bases are congruent and parallel. When trying to identify a right prism, ask yourself if this solid could have right prism been created by placing many congruent sheets of paper on prism that has bases aligned one above the top of each other. If so, this is a right prism. Some examples other and has lateral of right prisms are shown below. faces that are rectangles Triangular prism Rectangular prism The surface area of a right prism can be calculated using the following formula: SA 5 2B 1 hP, where B is the area of the base, h is the height of the prism, and P is the perimeter of the base. The lateral area of a figure is the area of the non-base faces lateral area only. When a prism has its bases facing up and down, the area of the non-base faces of a figure lateral area is the area of the vertical faces. (For a rectangular prism, any pair of opposite faces can be bases.) The lateral area of a right prism can be calculated by multiplying the perimeter of the base by the height of the prism. This is summarized by the formula: LA 5 hP. Copyright © 2009 by Nelson Education Ltd. Reproduction permitted for classrooms 11A Lateral and Surface Area of Right Prisms 1 Jorge is trying to wrap a present that is in a box shaped as a right prism. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -
Pentagonal Pyramid
Chapter 9 Surfaces and Solids Copyright © Cengage Learning. All rights reserved. Pyramids, Area, and 9.2 Volume Copyright © Cengage Learning. All rights reserved. Pyramids, Area, and Volume The solids (space figures) shown in Figure 9.14 below are pyramids. In Figure 9.14(a), point A is noncoplanar with square base BCDE. In Figure 9.14(b), F is noncoplanar with its base, GHJ. (a) (b) Figure 9.14 3 Pyramids, Area, and Volume In each space pyramid, the noncoplanar point is joined to each vertex as well as each point of the base. A solid pyramid results when the noncoplanar point is joined both to points on the polygon as well as to points in its interior. Point A is known as the vertex or apex of the square pyramid; likewise, point F is the vertex or apex of the triangular pyramid. The pyramid of Figure 9.14(b) has four triangular faces; for this reason, it is called a tetrahedron. 4 Pyramids, Area, and Volume The pyramid in Figure 9.15 is a pentagonal pyramid. It has vertex K, pentagon LMNPQ for its base, and lateral edges and Although K is called the vertex of the pyramid, there are actually six vertices: K, L, M, N, P, and Q. Figure 9.15 The sides of the base and are base edges. 5 Pyramids, Area, and Volume All lateral faces of a pyramid are triangles; KLM is one of the five lateral faces of the pentagonal pyramid. Including base LMNPQ, this pyramid has a total of six faces. The altitude of the pyramid, of length h, is the line segment from the vertex K perpendicular to the plane of the base. -
Unit 6 Visualising Solid Shapes(Final)
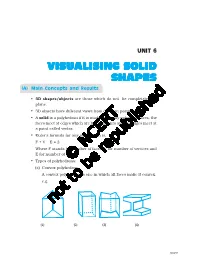
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Steinitz's Theorem Project Report §1 Introduction §2 Basic Definitions
Steinitz's Theorem Project Report Jon Hillery May 17, 2019 §1 Introduction Looking at the vertices and edges of polyhedra gives a family of graphs that we might expect has nice properties. It turns out that there is actually a very nice characterization of these graphs! We can use this characterization to find useful representations of certain graphs. §2 Basic Definitions We define a space to be convex if the line segment connecting any two points in the space remains entirely inside the space. This works for two-dimensional sets: and three-dimensional sets: Given a polyhedron, we define its 1-skeleton to be the graph formed from the vertices and edges of the polyhedron. For example, the 1-skeleton of a tetrahedron is K4: 1 Jon Hillery (May 17, 2019) Steinitz's Theorem Project Report Here are some further examples of the 1-skeleton of an icosahedron and a dodecahedron: §3 Properties of 1-Skeletons What properties do we know the 1-skeleton of a convex polyhedron must have? First, it must be planar. To see this, imagine moving your eye towards one of the faces until you are close enough that all of the other faces appear \inside" the face you are looking through, as shown here: This is always possible because the polyedron is convex, meaning intuitively it doesn't have any parts that \jut out". The graph formed from viewing in this way will have no intersections because the polyhedron is convex, so the straight-line rays our eyes see are not allowed to leave via an edge on the boundary of the polyhedron and then go back inside. -

Module-03 / Lecture-01 SOLIDS Introduction- This Chapter Deals with the Orthographic Projections of Three – Dimensional Objects Called Solids
1 Module-03 / Lecture-01 SOLIDS Introduction- This chapter deals with the orthographic projections of three – dimensional objects called solids. However, only those solids are considered the shape of which can be defined geometrically and are regular in nature. To understand and remember various solids in this subject properly, those are classified & arranged in to two major groups- Polyhedron- A polyhedron is defined as a solid bounded by planes called faces, which meet in straight lines called edges. Regular Polyhedron- It is polyhedron, having all the faces equal and regular. Tetrahedron- It is a solid, having four equal equilateral triangular faces. Cube- It is a solid, having six equal square faces. Octahedron- It is a solid, having eight equal equilateral triangular faces. Dodecahedron- It is a solid, having twelve equal pentagonal faces. Icosahedrons- It is a solid, having twenty equal equilateral triangular faces. Prism- This is a polyhedron, having two equal and similar regular polygons called its ends or bases, parallel to each other and joined by other faces which are rectangles. The imaginary line joining the centre of the bases is called the axis. A right and regular prism has its axis perpendicular to the base. All the faces are equal rectangles. 1 2 Pyramid- This is a polyhedron, having a regular polygon as a base and a number of triangular faces meeting at a point called the vertex or apex. The imaginary line joining the apex with the centre of the base is known as the axis. A right and regular pyramid has its axis perpendicular to the base which is a regular plane. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs. -

Edge Energies and S S of Nan O Pred P I Tatt
SAND2007-0238 .. j c..* Edge Energies and S s of Nan o pred p i tatt dexim 87185 and Llverm ,ultIprogramlabora lartln Company, for Y'S 11 Nuclear Security Admini 85000. Approved for Inallon unlimited. Issued by Sandia National Laboratories, operated for the United States Department of Energy by Sandia Corporation. NOTICE: This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government, nor any agency thereof, nor any of their employees, nor any of their contractors, subcontractors, or their employees, make any warranty, express or implied, or assume any legal liability or responsibility for the accuracy, completeness, or usefidness of any information, apparatus, product, or process disclosed, or represent that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government, any agency thereof, or any of their contractors or subcontractors. The views and opinions expressed herein do not necessarily state or reflect those of the United States Government, any agency thereof, or any of their contractors. Printed in the United States of America. This report has been reproduced directly from the best available copy. Available to DOE and DOE contractors from U.S. Department of Energy Office of Scientific and Technical Information P.O. Box 62 Oak Ridge, TN 3783 1 Telephone: (865) 576-8401 Facsimile: (865) 576-5728 E-Mail: reDorts(cL.adonls.os(I.oov Online ordering: htto://www.osti.ao\ /bridge Available to the public from U.S. -

Apollonius of Pergaconics. Books One - Seven
APOLLONIUS OF PERGACONICS. BOOKS ONE - SEVEN INTRODUCTION A. Apollonius at Perga Apollonius was born at Perga (Περγα) on the Southern coast of Asia Mi- nor, near the modern Turkish city of Bursa. Little is known about his life before he arrived in Alexandria, where he studied. Certain information about Apollonius’ life in Asia Minor can be obtained from his preface to Book 2 of Conics. The name “Apollonius”(Apollonius) means “devoted to Apollo”, similarly to “Artemius” or “Demetrius” meaning “devoted to Artemis or Demeter”. In the mentioned preface Apollonius writes to Eudemus of Pergamum that he sends him one of the books of Conics via his son also named Apollonius. The coincidence shows that this name was traditional in the family, and in all prob- ability Apollonius’ ancestors were priests of Apollo. Asia Minor during many centuries was for Indo-European tribes a bridge to Europe from their pre-fatherland south of the Caspian Sea. The Indo-European nation living in Asia Minor in 2nd and the beginning of the 1st millennia B.C. was usually called Hittites. Hittites are mentioned in the Bible and in Egyptian papyri. A military leader serving under the Biblical king David was the Hittite Uriah. His wife Bath- sheba, after his death, became the wife of king David and the mother of king Solomon. Hittites had a cuneiform writing analogous to the Babylonian one and hi- eroglyphs analogous to Egyptian ones. The Czech historian Bedrich Hrozny (1879-1952) who has deciphered Hittite cuneiform writing had established that the Hittite language belonged to the Western group of Indo-European languages [Hro].