Brno University of Technology Extension
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cubietruck – Mini PC
SPRZĘT Cubietruck – mini PC Rynek komputerków jednopłytkowych opartych o procesory ARM zapoczątkowany przez Raspberry Pi rozwija się doskonale. Może nie jak grzyby po deszczu, ale systematycznie pojawiają się nowe rozwiązania: BeagleBoard, Marsboard, Cubieboard, Olinuxino itp. Różnią się one wyposażeniem, wydajnością, dostępnością dokumentacji oraz wsparciem technicznym. Ciekawie rozwija się propozycja Cubieboard. mocujących. Niby nic, ale te trzy kawałki two- org, zapoczątkowana płytką Cubieboard A10 rzywa i paczka tulejek umożliwiają poskładanie Fotografi a 3. Obudowa Cubietruck (opisaną w EP06/2013) i Cubieboard2 zgod- samodzielnego systemu mini-PC wyposażo- ną mechanicznie, ale zbudowaną w oparciu nego w dysk HDD 2,5”, wystarczająco zabez- rolę domowego centrum multimedialnego lub o nowszy, dwurdzeniowy procesor A20, zwięk- pieczając mechanicznie jego elementy. Osłony Linuxowego komputera PC. Jedyne zastrzeżenie szający wydajność Cubie i paletę jej zastosowań w odpowiednich miejscach mają wyfrezowane można mieć do kilku różnokolorowych LED, (fotografi a 1). Najnowsza propozycja to Cubie- otwory umożliwiające korzystanie z GPIO bez bezlitośnie informujących nasze oczy o stanie truck (Cubieboard3), oparty podobnie jak Cu- zdejmowania obudowy. pracy Cubie. bieboard2 (fotografi a 2) o procesor Allwinner Ciekawą propozycją dla osób wykorzy- Cubieboard3 oparty jest o SoC w architektu- A20, lecz mający znacznie bogatsze wyposaże- stujących Cubieboard3 w roli samodzielnego rze ARM7 – Allwinner A20, który w połączeniu nie, co niestety wiąże się z wyższą ceną. Porów- mini-PC, jest pełna obudowa pokazana na fo- ze sporej wielkości dyskiem NAND Flash oraz nanie parametrów poszczególnych komputer- tografi i 3. W swoim wnętrzu mieści swobodnie zwiększoną pamięcią RAM bezproblemowo ków Cubieboard umieszczono w tabeli 1. płytkę Cubieboard3, dysk HDD 2,5” (fotogra- sprawdza się w roli komputera PC pracującego Podobnie jak w przypadku poprzednich fi a 4) i przewody połączeniowe. -
Improving the Beaglebone Board with Embedded Ubuntu, Enhanced GPMC Driver and Python for Communication and Graphical Prototypes
Final Master Thesis Improving the BeagleBone board with embedded Ubuntu, enhanced GPMC driver and Python for communication and graphical prototypes By RUBÉN GONZÁLEZ MUÑOZ Directed by MANUEL M. DOMINGUEZ PUMAR FINAL MASTER THESIS 30 ECTS, JULY 2015, ELECTRICAL AND ELECTRONICS ENGINEERING Abstract Abstract BeagleBone is a low price, small size Linux embedded microcomputer with a full set of I/O pins and processing power for real-time applications, also expandable with cape pluggable boards. The current work has been focused on improving the performance of this board. In this case, the BeagleBone comes with a pre-installed Angstrom OS and with a cape board using a particular software “overlay” and applications. Due to a lack of support, this pre-installed OS has been replaced by Ubuntu. As a consequence, the cape software and applications need to be adapted. Another necessity that emerges from the stated changes is to improve the communications through a GPMC interface. The depicted driver has been built for the new system as well as synchronous variants, also developed and tested. Finally, a set of applications in Python using the cape functionalities has been developed. Some extra graphical features have been included as example. Contents Contents Abstract ..................................................................................................................................................................................... 5 List of figures ......................................................................................................................................................................... -

Suzanne's Microcluster Slides
csinparallel.org Microclusters for teaching PDC Suzanne J. Matthews (West Point) 1 csinparallel.org What is a Microcluster? • A personal, highly portable Beowulf cluster • Enables highly interactive and tactile experiential learning • Notable early examples: – Ultimate Linux Lunch Box (Ron Minnich and Mitch Williams, Sandia National Labs) – LittleFe (Charlie Peck, Earlham College) – Microwulf (Joel Adams, Calvin College) 2 csinparallel.org Single Board Computers (SBCs) 3 csinparallel.org Student Pi (West Point) Suzanne J. Matthews Raspberry Pi nodes - Prototype: Raspberry Pi B nodes - Initial: Raspberry Pi B+ nodes - Current: Raspberry Pi 2 nodes - 900 Mhz quad-core CPU, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Raspbian Linux June 2014 - ~$40 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html October 2014 May 2016 4 csinparallel.org Student Parallella (West Point) Suzanne J. Matthews Parallella nodes - dual-core ARM A9 CPU, 16-core Epiphany co-processor, 1 GB of RAM, μHDMI, μUSB, Gigabit Ethernet - Linaro Linux - ~$145 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html - http://suzannejmatthews.github.io/ October 2014 April 2016 January 2015 5 csinparallel.org Half ShoeBox Clusters (Centre College) David Toth Cubieboard/ODROID nodes (2-node clusters) - Prototype: Cubieboard2: dual-core ARM Cortex A7, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Latest: ODROID C2: 2Ghz quad-core A53, 2 GB of RAM, HDMI, USB, Gigabit Ethernet, - Android/Ubuntu Linux - ~ $150-$200 p/cluster - Materials: Early 2014 - http://web.centre.edu/david.toth/portablecluster/index.html -

DFR0261 Dfrobot Datasheet
Cubieboard 2 Kit SKU:DFR0261 INTRODUCTION Cubieboard2 (ARM® Cortex™‐A7 Dual‐Core), a upgrade of current cubieboard, is ready to ship now. Cubieboard2 is based on Allwinner A20 SoC, small size , hacker friendly, extendable and very low‐cost.It is an alternative to the Raspberry Pi or pcDuino. Compare with Raspberry Pi, it has higher performance, SATA supported and 96 extended interface. Compared with cubieboard,just replacing one chip(well, the most important one),cubieboard2 are upgraded from a single core to a dual core and twice gpu performance, and even no change is needed on the PCB. So all the base boards, accessories that works with cubieboard will also fit in with cubieboard2. On the software side, cubieboard2 support both android 4.2 Jelly Bean, Ubuntu 12.04 and other Linux distributions. Android Jelly Bean improves on speed and simplicity and brings a lot of new feature. If you plan to assemble a small computer, you can try using this small ARM platform cubieboard. It supports Ubuntu and other Linux distributions; you could use it like an ordinary computer operation. At the same time, the platform also supports Android 4.0 Ice Cream Sandwich system and has bulit‐in IR sensor, can be used as "Android TV". SPECIFICATION CPU:ARM® Cortex™‐A7 Dual‐Core GPU:ARM® Mali400MP2, Complies with OpenGL ES 2.0/1.1 Memory:1GB DDR3 @960M Storage:4GB internal NAND flash, up to 64GB on uSD slot, up to 2T on 2.5 SATA disk Power:5VDC input 2A or USB otg input Networking:10/100 ethernet, optional wifi USB : Two USB 2.0 HOST, one USB 2.0 OTG Extended Interfaces: 96 extend pin interface, including I2C, SPI, RGB/LVDS, CSI/TS, FM‐IN, ADC, CVBS, VGA, SPDIF‐OUT, R‐TP, and more Other: One IR SHIPPING LIST Cubieboard 2 main board x1 DC to USB cable x1 SATA cable(data + power) x1 Cubieboard Case x1 Serial to USB cable x1 Powered By DFRobot © 2008-2017 . -

Cubieboard Cubieboard2 Cubietruck Beaglebone Black
Raspberry Pi (Model B rev.2) Cubieboard Cubieboard2 Cubietruck Beaglebone Black 1 Ghz (OC) ARM® Cortex-A6 1 Ghz ARM® Cortex-A8 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A8 CPU ARM1176JZF-F Allwinner A10 C8096CA Allwinner A20 Allwinner A20 AM335x GPU/FPU VideoCore IV Mali-400 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) SGX350 3D / NEON FPU accelerator RAM 512 MB 1 GB DDR3 2 GB 2 GB 512 MB DDR3 Storage micro SD/SDHC 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 2.0 2GB eMMC Power micro USB (5V/1A) 3.5 W DC 5v/2A DC 5v/2A DC 5v/2.5A DC 5V/500mA Video RCA Composite Video, HDMI 1.4 HDMI HDMI HDMI/VGA microHDMI Audio 3.5 mm Headphone Jack 3.5 mm Headphone Jack / Line In 3.5 mm Headphone Jack 3.5 mm Headphone Jack, SPDIF Network 10/100 Mbps 10/100 Mbps 10/100 Mbps 10/100/1000 Mbps, Wifi, Bluetooth 10/100 Mbps 2x46 PIN GPIO I/O ports 26 PIN GPIO, 2x Ribon 2x48 PIN GPIO, 4PIN Serial, 1IR 2x48 PIN GPIO, 4PIN Serial, 1IR 1x 54 PIN GPIO (Arduino Shield Compatible) USB ports 2x USB 2.0 2x USB 2.0 2x USB 2.0, 1 mini USB OTG 2x USB 2.0, 1 mini USB OTG 1x USB 2.0 Linux (Raspbian, Debian, Fedora, Arch, Gentoo, Kali), Andoid, Angstrom, Ubuntu, Fedora, Gentoo. -

Building a Datacenter with ARM Devices
Building a Datacenter with ARM Devices Taylor Chien1 1SUNY Polytechnic Institute ABSTRACT METHODS THE CASE CURRENT RESULTS The ARM CPU is becoming more prevalent as devices are shrinking and Physical Custom Enclosure Operating Systems become embedded in everything from medical devices to toasters. Build a fully operational environment out of commodity ARM devices using Designed in QCAD and laser cut on hardboard by Ponoko Multiple issues exist with both Armbian and Raspbian, including four However, Linux for ARM is still in the very early stages of release, with SBCs, Development Boards, or other ARM-based systems Design was originally only for the Raspberry Pis, Orange Pi Ones, Udoo critical issues that would prevent them from being used in a datacenter many different issues, challenges, and shortcomings. Have dedicated hard drives and power system for mass storage, including Quads, PINE64, and Cubieboard 3 multiple drives for GlusterFS operation, and an Archive disk for backups and Issue OS In order to test what level of service commodity ARM devices have, I Each device sits on a tray which can be slid in and out at will rarely-used storage Kernel and uboot are not linked together after a Armbian decided to build a small data center with these devices. This included Cable management and cooling are on the back for easy access Build a case for all of these devices that will protect them from short circuits version update building services usually found in large businesses, such as LDAP, DNS, Designed to be solid and not collapse under its own weight and dust Operating system always performs DHCP request Raspbian Mail, and certain web applications such as Roundcube webmail, Have devices hooked up to a UPS for power safety Design Flaws Allwinner CPUs crash randomly when under high Armbian ownCloud storage, and Drupal content management. -
ARM Based Customizing an Operating System for the Single Board System (Cubie-Truck)
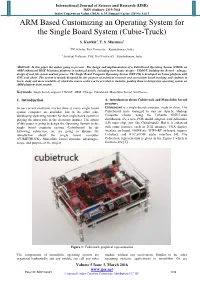
International Journal of Science and Research (IJSR) ISSN (Online): 2319-7064 Index Copernicus Value (2013): 6.14 | Impact Factor (2014): 5.611 ARM Based Customizing an Operating System for the Single Board System (Cubie-Truck) S. Karthik1, T. S. Murunya2 1PG Scholar, Prist University – Kumbakonam, India 2Assistant Professor, CSE, Prist University – Kumbakonam, India Abstract: In this paper the author going to present , The design and implementation of a CubieBoard Operating System (CBOS) on ARM (Advanced RISC Machine) platform in technical details, including boot loader design - UBOOT, building the Kernel - uImage, design of root file system and init process. The Single Board Computer Operating System (SBC OS) is developed on Linux platform with GNU tool chain. The system is mainly designed for the purpose of technical research and curriculum based teaching and students to learn, study and more readable, of which the source codes can be provided to students, guiding them to design tiny operating system on ARM platform from scratch. Keywords: Single board computer, UBOOT, ARM, UImage, Cubieboard, Monolithic Kernel, Init Process 1. Introduction A. Introduction about Cubietruck and Monolithic kernel structure In our current electronic market there is many single board Cubieboard is a single-board computer, made in china. The system computer are available, but in the other side, Cubieboard team managed to run an Apache Hadoop developing Operating System for that single board system is Computer cluster using the Lubuntu GNU/Linux playing the major role in the electronic market. The author distribution. It's a new PCB model adopted with Allwinner of this paper is going to design the Operating System to the A20 main chip, just like Cubieboard2. -

Proyecto Fin De Grado
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA Y SISTEMAS DE TELECOMUNICACIÓN PROYECTO FIN DE GRADO TÍTULO: Despliegue de Liota (Little IoT Agent) en Raspberry Pi AUTOR: Ricardo Amador Pérez TITULACIÓN: Ingeniería Telemática TUTOR (o Director en su caso): Antonio da Silva Fariña DEPARTAMENTO: Departamento de Ingeniería Telemática y Electrónica VºBº Miembros del Tribunal Calificador: PRESIDENTE: David Luengo García VOCAL: Antonio da Silva Fariña SECRETARIO: Ana Belén García Hernando Fecha de lectura: Calificación: El Secretario, Despliegue de Liota (Little IoT Agent) en Raspberry Pi Quizás de todas las líneas que he escrito para este proyecto, estas sean a la vez las más fáciles y las más difíciles de todas. Fáciles porque podría doblar la longitud de este proyecto solo agradeciendo a mis padres la infinita paciencia que han tenido conmigo, el apoyo que me han dado siempre, y el esfuerzo que han hecho para que estas líneas se hagan realidad. Por todo ello y mil cosas más, gracias. Mamá, papá, lo he conseguido. Fáciles porque sin mi tutor Antonio, este proyecto tampoco sería una realidad, no solo por su propia labor de tutor, si no porque literalmente sin su ayuda no se hubiera entregado a tiempo y funcionando. Después de esto Antonio, voy a tener que dejarme ganar algún combate en kenpo como agradecimiento. Fáciles porque, sí melones os toca a vosotros, Alex, Alfonso, Manu, Sama, habéis sido mi apoyo más grande en los momentos más difíciles y oscuros, y mis mejores compañeros en los momentos de felicidad. Amigos de Kulturales, los hermanos Baños por empujarme a mejorar, Pablo por ser un ejemplo a seguir, Chou, por ser de los mejores profesores y amigos que he tenido jamás. -

Cubieboard5 SKU: 10000 Category: Board Description General Details Documents
CubieBoard5 SKU: 10000 Category: Board Description General Details Documents Description Cubieboard5 is the 5rd generation product of CubieBoard series from Cubietech Limited Company, and it’s the updated version of CubieBoard3. Thanks to Allwinnertech’ H8 SOC, Compared with CubieBoard3 the performance has been increased by 4 times. CubieBoard5 is open source hardware, single board computer, or development board which targets Developers, Geeks, Makers, Students… CubieBoard5 is also can be used as low power industry computer in all works of life since we have designed a very sturdy and durable metallic enclosure for it which named CubieTruck Plus Metal case. In this case, not only the CubieBoard5 main board can be installed, but also the 2.5 inch HDD/SSD and 5300mAh Li-Po battery. With the HDD and battery, the CubieBoard5 is more suitable for industry applications. Because of open source strategy of our company, the CubieBoard5’s application space is more flexible, and the ecology is more perfect. Product Information Name: Cubieboard5, CB5 for short, Also named CubieTruck plus as MiniPc Property: Software open source, Hardware open, Production materials closed Owner: CubieTech Limited Chipset: Allwinner technology H8, Arm architecture Cortex-A7 octa-core SOC System: Android, Ubuntu and many other open source distribution… Target: Developer, Geek, Maker, Scholar, Student… Product Introduction Cubieboard5 is the updated version of CubieBoard3 open source hardware. It’s a new PCB model adopted with Allwinner H8 main chip. And it is enhanced with some features, such as 2GB DDR3 memory, DP display port on-board, 100M/1000M RJ45, WIFI+BT on-board, support Li-battery and RTC battery, SPDIF audio interface. -
Getting Started with Buildroot
Embedded Apprentice Linux Engineer Getting started with Buildroot Thomas Petazzoni [email protected] ľ Copyright 2004-2018, Bootlin. Creative Commons BY-SA 3.0 license. Formerly Free Electrons Corrections, suggestions, contributions and translations are welcome! - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 1/1 Thomas Petazzoni I Embedded Linux engineer at Free Electrons → Bootlin I Embedded Linux expertise I Development, consulting and training I Strong open-source focus I Freely available training materials I Open-source contributor I Living in Toulouse, France - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 2/1 Building an embedded Linux system + Readily available - Large, usually 100+ MB - Not available for all architectures - Not easy to customize - Generally require native compilation - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 3/1 Building an embedded Linux system + Smaller and flexible - Very hard to handle cross-compilation and dependencies - Not reproducible - No benefit from other people’s work - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 3/1 Building an embedded Linux system + Small and flexible + Reproducible, handles cross-compilation and dependencies + Available for virtually all architectures - One tool to learn - Build time - Kernel, drivers and embedded Linux - Development, -
Sidekick Basic Kit for Arduino V2
We have 45,000 LP502030-PCM-NTC-LD-A02554 - EEMB - Lithium Battery Rectangular 3.7V 250mAh Rechargeable in stock now. Starting at $0.034. This EEMB part is fully warrantied and traceable. 00000005981LF-000110060025 EOSSEEED Power DEVELOPMENT LIMITED Buy NowBuy Now Looking for a discount? Check out our current promotions! Give us a call 1-855-837-4225 1-415-281-3866 International: 1-415-281-38661-555-555-5555 ArrowArrow Electronics,Electronics, Inc Verical Division P.O.9201 Box East 740970 Dry Creek Road LosCentennial, Angeles, COCA 90074-097080112 This coversheet was created by Verical, a division of Arrow Electronics, Inc. (“Verical”). The attached document was created by the part supplier, not Verical, and is provided strictly 'as is.' Verical, its subsidiaries, affiliates, employees, and agents make no representations or warranties regarding the attached document and disclaim any liability for the consequences of relying on the information therein. All referenced brands, product names, service names, and trademarks are the property of their respective owners. Bazaar Fusion Propagate Community Wiki USD Login | Sign up Category Search for products, brands and platforms Feedback & Ideas|Help Bazaar / Arduino / Kits for Arduino / Sidekick Basic Kit for Arduino V2 Sidekick Basic Kit for Arduino V2 SKU 110060025 IN STOCK 3 Available Beginners-friendly design Qty: 1 Includes over 80 essential elements for basic DIY projects Compatible with Arduino, Seeeduino and many development boards Comes with a handy parts storage box ADD TO CART Description Documents Wiki The Arduino Sidekick Basic Kit is designed to be used with your Arduino / Seeeduino / Seeeduino ADK / Maple Lilypad or any MCU board. -

Banana PI M1 User Manual
Banana PI M1 User Manual Banana PI M1 User Manual <Version: V2.0 > Banana PI is the open source hardware platform which published to assistant the Elastos.org open source OS, Banana PI is the dual core Android 4.2 product which more better than the Raspberry Pi. 1 Banana PI M1 User Manual Banana Pi series run Android,Debian linux,Ubuntu linux, Raspberry Pi imange and cubieboard imange. Elastos coordinate multi CUP to from the family cloud entirnment which based on the “software/hardware service” Banana PI hardware: 1Ghz ARM7 dual-core processor, 1GB DDR3 SDRAM, Banana PI with Gigabit ethernet port, SATA Socket. It can run with Android 4.2.2 smoothly. The size of Banana PI M1 like the credit card, it can easily run with the game it support 1080P high definition video output, the GPIO compatible with Raspberry Pi and can run the ROM Image directly Hardware specification CPU A20 ARM Cortex™-A7 Dual-Core GPU ARM Mali400MP2Complies with OpenGL ES 2.0/1.1 Memory 1GB DDR3 (shared with GPU) (SDRAM) Onboard Storage SD (Max. 64GB) / MMC card slot UP to 2T on 2.5 SATA disk Onboard 10/100/1000 Ethernet RJ45,optional WIFI Network Video Input A CSI input connector allows for the connection of a designed camera module Video HDMI, CVBS , LVDS/RGB Outputs Audio Output 3.5 mm Jack and HDMI Power 5 volt via MicroUSB(DC In Only) and/or MicroUSB (OTG) Source USB 2.0 2 (direct from Allwinner A20 chip) Ports Reset button: Next to MicroUSB connector Buttons Power button: Next to Reset button Boot button (Optional): Behind HDMI connector GPIO(2X13) GPIO,UART,I2C bus,SPI bus with two chip selects, pin CAN bus,ADC,PWM,+3.3v,+5v,ground.