Three-Dimensional Coordinate Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Models of 2-Dimensional Hyperbolic Space and Relations Among Them; Hyperbolic Length, Lines, and Distances
Models of 2-dimensional hyperbolic space and relations among them; Hyperbolic length, lines, and distances Cheng Ka Long, Hui Kam Tong 1155109623, 1155109049 Course Teacher: Prof. Yi-Jen LEE Department of Mathematics, The Chinese University of Hong Kong MATH4900E Presentation 2, 5th October 2020 Outline Upper half-plane Model (Cheng) A Model for the Hyperbolic Plane The Riemann Sphere C Poincar´eDisc Model D (Hui) Basic properties of Poincar´eDisc Model Relation between D and other models Length and distance in the upper half-plane model (Cheng) Path integrals Distance in hyperbolic geometry Measurements in the Poincar´eDisc Model (Hui) M¨obiustransformations of D Hyperbolic length and distance in D Conclusion Boundary, Length, Orientation-preserving isometries, Geodesics and Angles Reference Upper half-plane model H Introduction to Upper half-plane model - continued Hyperbolic geometry Five Postulates of Hyperbolic geometry: 1. A straight line segment can be drawn joining any two points. 2. Any straight line segment can be extended indefinitely in a straight line. 3. A circle may be described with any given point as its center and any distance as its radius. 4. All right angles are congruent. 5. For any given line R and point P not on R, in the plane containing both line R and point P there are at least two distinct lines through P that do not intersect R. Some interesting facts about hyperbolic geometry 1. Rectangles don't exist in hyperbolic geometry. 2. In hyperbolic geometry, all triangles have angle sum < π 3. In hyperbolic geometry if two triangles are similar, they are congruent. -

Forces Different Types of Forces
Forces and motion are a part of your everyday life for example pushing a trolley, a horse pulling a rope, speed and acceleration. Force and motion causes objects to move but also to stay still. Motion is simply a movement but needs a force to move. There are 2 types of forces, contact forces and act at a distance force. Forces Every day you are using forces. Force is basically push and pull. When you push and pull you are applying a force to an object. If you are Appling force to an object you are changing the objects motion. For an example when a ball is coming your way and then you push it away. The motion of the ball is changed because you applied a force. Different Types of Forces There are more forces than push or pull. Scientists group all these forces into two groups. The first group is contact forces, contact forces are forces when 2 objects are physically interacting with each other by touching. The second group is act at a distance force, act at a distance force is when 2 objects that are interacting with each other but not physically touching. Contact Forces There are different types of contact forces like normal Force, spring force, applied force and tension force. Normal force is when nothing is happening like a book lying on a table because gravity is pulling it down. Another contact force is spring force, spring force is created by a compressed or stretched spring that could push or pull. Applied force is when someone is applying a force to an object, for example a horse pulling a rope or a boy throwing a snow ball. -

Geodesic Distance Descriptors
Geodesic Distance Descriptors Gil Shamai and Ron Kimmel Technion - Israel Institute of Technologies [email protected] [email protected] Abstract efficiency of state of the art shape matching procedures. The Gromov-Hausdorff (GH) distance is traditionally used for measuring distances between metric spaces. It 1. Introduction was adapted for non-rigid shape comparison and match- One line of thought in shape analysis considers an ob- ing of isometric surfaces, and is defined as the minimal ject as a metric space, and object matching, classification, distortion of embedding one surface into the other, while and comparison as the operation of measuring the discrep- the optimal correspondence can be described as the map ancies and similarities between such metric spaces, see, for that minimizes this distortion. Solving such a minimiza- example, [13, 33, 27, 23, 8, 3, 24]. tion is a hard combinatorial problem that requires pre- Although theoretically appealing, the computation of computation and storing of all pairwise geodesic distances distances between metric spaces poses complexity chal- for the matched surfaces. A popular way for compact repre- lenges as far as direct computation and memory require- sentation of functions on surfaces is by projecting them into ments are involved. As a remedy, alternative representa- the leading eigenfunctions of the Laplace-Beltrami Opera- tion spaces were proposed [26, 22, 15, 10, 31, 30, 19, 20]. tor (LBO). When truncated, the basis of the LBO is known The question of which representation to use in order to best to be the optimal for representing functions with bounded represent the metric space that define each form we deal gradient in a min-max sense. -

Vectors, Matrices and Coordinate Transformations
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between them, physical laws can often be written in a simple form. Since we will making extensive use of vectors in Dynamics, we will summarize some of their important properties. Vectors For our purposes we will think of a vector as a mathematical representation of a physical entity which has both magnitude and direction in a 3D space. Examples of physical vectors are forces, moments, and velocities. Geometrically, a vector can be represented as arrows. The length of the arrow represents its magnitude. Unless indicated otherwise, we shall assume that parallel translation does not change a vector, and we shall call the vectors satisfying this property, free vectors. Thus, two vectors are equal if and only if they are parallel, point in the same direction, and have equal length. Vectors are usually typed in boldface and scalar quantities appear in lightface italic type, e.g. the vector quantity A has magnitude, or modulus, A = |A|. In handwritten text, vectors are often expressed using the −→ arrow, or underbar notation, e.g. A , A. Vector Algebra Here, we introduce a few useful operations which are defined for free vectors. Multiplication by a scalar If we multiply a vector A by a scalar α, the result is a vector B = αA, which has magnitude B = |α|A. The vector B, is parallel to A and points in the same direction if α > 0. -

Holley GM LS Race Single-Plane Intake Manifold Kits
Holley GM LS Race Single-Plane Intake Manifold Kits 300-255 / 300-255BK LS1/2/6 Port-EFI - w/ Fuel Rails 4150 Flange 300-256 / 300-256BK LS1/2/6 Carbureted/TB EFI 4150 Flange 300-290 / 300-290BK LS3/L92 Port-EFI - w/ Fuel Rails 4150 Flange 300-291 / 300-291BK LS3/L92 Carbureted/TB EFI 4150 Flange 300-294 / 300-294BK LS1/2/6 Port-EFI - w/ Fuel Rails 4500 Flange 300-295 / 300-295BK LS1/2/6 Carbureted/TB EFI 4500 Flange IMPORTANT: Before installation, please read these instructions completely. APPLICATIONS: The Holley LS Race single-plane intake manifolds are designed for GM LS Gen III and IV engines, utilized in numerous performance applications, and are intended for carbureted, throttle body EFI, or direct-port EFI setups. The LS Race single-plane intake manifolds are designed for hi-performance/racing engine applications, 5.3 to 6.2+ liter displacement, and maximum engine speeds of 6000-7000 rpm, depending on the engine combination. This single-plane design provides optimal performance across the RPM spectrum while providing maximum performance up to 7000 rpm. These intake manifolds are for use on non-emissions controlled applications only, and will not accept stock components and hardware. Port EFI versions may not be compatible with all throttle body linkages. When installing the throttle body, make certain there is a minimum of ¼” clearance between all linkage and the fuel rail. SPLIT DESIGN: The Holley LS Race manifold incorporates a split feature, which allows disassembly of the intake for direct access to internal plenum and port surfaces, making custom porting and matching a snap. -

P. 1 Math 490 Notes 7 Zero Dimensional Spaces for (SΩ,Τo)
p. 1 Math 490 Notes 7 Zero Dimensional Spaces For (SΩ, τo), discussed in our last set of notes, we can describe a basis B for τo as follows: B = {[λ, λ] ¯ λ is a non-limit ordinal } ∪ {[µ + 1, λ] ¯ λ is a limit ordinal and µ < λ}. ¯ ¯ The sets in B are τo-open, since they form a basis for the order topology, but they are also closed by the previous Prop N7.1 from our last set of notes. Sets which are simultaneously open and closed relative to the same topology are called clopen sets. A topology with a basis of clopen sets is defined to be zero-dimensional. As we have just discussed, (SΩ, τ0) is zero-dimensional, as are the discrete and indiscrete topologies on any set. It can also be shown that the Sorgenfrey line (R, τs) is zero-dimensional. Recall that a basis for τs is B = {[a, b) ¯ a, b ∈R and a < b}. It is easy to show that each set [a, b) is clopen relative to τs: ¯ each [a, b) itself is τs-open by definition of τs, and the complement of [a, b)is(−∞,a)∪[b, ∞), which can be written as [ ¡[a − n, a) ∪ [b, b + n)¢, and is therefore open. n∈N Closures and Interiors of Sets As you may know from studying analysis, subsets are frequently neither open nor closed. However, for any subset A in a topological space, there is a certain closed set A and a certain open set Ao associated with A in a natural way: Clτ A = A = \{B ¯ B is closed and A ⊆ B} (Closure of A) ¯ o Iτ A = A = [{U ¯ U is open and U ⊆ A}. -
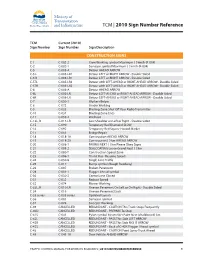
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

Molecular Symmetry
Molecular Symmetry Symmetry helps us understand molecular structure, some chemical properties, and characteristics of physical properties (spectroscopy) – used with group theory to predict vibrational spectra for the identification of molecular shape, and as a tool for understanding electronic structure and bonding. Symmetrical : implies the species possesses a number of indistinguishable configurations. 1 Group Theory : mathematical treatment of symmetry. symmetry operation – an operation performed on an object which leaves it in a configuration that is indistinguishable from, and superimposable on, the original configuration. symmetry elements – the points, lines, or planes to which a symmetry operation is carried out. Element Operation Symbol Identity Identity E Symmetry plane Reflection in the plane σ Inversion center Inversion of a point x,y,z to -x,-y,-z i Proper axis Rotation by (360/n)° Cn 1. Rotation by (360/n)° Improper axis S 2. Reflection in plane perpendicular to rotation axis n Proper axes of rotation (C n) Rotation with respect to a line (axis of rotation). •Cn is a rotation of (360/n)°. •C2 = 180° rotation, C 3 = 120° rotation, C 4 = 90° rotation, C 5 = 72° rotation, C 6 = 60° rotation… •Each rotation brings you to an indistinguishable state from the original. However, rotation by 90° about the same axis does not give back the identical molecule. XeF 4 is square planar. Therefore H 2O does NOT possess It has four different C 2 axes. a C 4 symmetry axis. A C 4 axis out of the page is called the principle axis because it has the largest n . By convention, the principle axis is in the z-direction 2 3 Reflection through a planes of symmetry (mirror plane) If reflection of all parts of a molecule through a plane produced an indistinguishable configuration, the symmetry element is called a mirror plane or plane of symmetry . -

Descriptive Geometry Section 10.1 Basic Descriptive Geometry and Board Drafting Section 10.2 Solving Descriptive Geometry Problems with CAD
10 Descriptive Geometry Section 10.1 Basic Descriptive Geometry and Board Drafting Section 10.2 Solving Descriptive Geometry Problems with CAD Chapter Objectives • Locate points in three-dimensional (3D) space. • Identify and describe the three basic types of lines. • Identify and describe the three basic types of planes. • Solve descriptive geometry problems using board-drafting techniques. • Create points, lines, planes, and solids in 3D space using CAD. • Solve descriptive geometry problems using CAD. Plane Spoken Rutan’s unconventional 202 Boomerang aircraft has an asymmetrical design, with one engine on the fuselage and another mounted on a pod. What special allowances would need to be made for such a design? 328 Drafting Career Burt Rutan, Aeronautical Engineer Effi cient travel through space has become an ambi- tion of aeronautical engineer, Burt Rutan. “I want to go high,” he says, “because that’s where the view is.” His unconventional designs have included every- thing from crafts that can enter space twice within a two week period, to planes than can circle the Earth without stopping to refuel. Designed by Rutan and built at his company, Scaled Composites LLC, the 202 Boomerang aircraft is named for its forward-swept asymmetrical wing. The design allows the Boomerang to fl y faster and farther than conventional twin-engine aircraft, hav- ing corrected aerodynamic mistakes made previously in twin-engine design. It is hailed as one of the most beautiful aircraft ever built. Academic Skills and Abilities • Algebra, geometry, calculus • Biology, chemistry, physics • English • Social studies • Humanities • Computer use Career Pathways Engineers should be creative, inquisitive, ana- lytical, detail oriented, and able to work as part of a team and to communicate well. -

Glossary of Linear Algebra Terms
INNER PRODUCT SPACES AND THE GRAM-SCHMIDT PROCESS A. HAVENS 1. The Dot Product and Orthogonality 1.1. Review of the Dot Product. We first recall the notion of the dot product, which gives us a familiar example of an inner product structure on the real vector spaces Rn. This product is connected to the Euclidean geometry of Rn, via lengths and angles measured in Rn. Later, we will introduce inner product spaces in general, and use their structure to define general notions of length and angle on other vector spaces. Definition 1.1. The dot product of real n-vectors in the Euclidean vector space Rn is the scalar product · : Rn × Rn ! R given by the rule n n ! n X X X (u; v) = uiei; viei 7! uivi : i=1 i=1 i n Here BS := (e1;:::; en) is the standard basis of R . With respect to our conventions on basis and matrix multiplication, we may also express the dot product as the matrix-vector product 2 3 v1 6 7 t î ó 6 . 7 u v = u1 : : : un 6 . 7 : 4 5 vn It is a good exercise to verify the following proposition. Proposition 1.1. Let u; v; w 2 Rn be any real n-vectors, and s; t 2 R be any scalars. The Euclidean dot product (u; v) 7! u · v satisfies the following properties. (i:) The dot product is symmetric: u · v = v · u. (ii:) The dot product is bilinear: • (su) · v = s(u · v) = u · (sv), • (u + v) · w = u · w + v · w. -
1-1 Understanding Points, Lines, and Planes Lines, and Planes
Understanding Points, 1-11-1 Understanding Points, Lines, and Planes Lines, and Planes Holt Geometry 1-1 Understanding Points, Lines, and Planes Objectives Identify, name, and draw points, lines, segments, rays, and planes. Apply basic facts about points, lines, and planes. Holt Geometry 1-1 Understanding Points, Lines, and Planes Vocabulary undefined term point line plane collinear coplanar segment endpoint ray opposite rays postulate Holt Geometry 1-1 Understanding Points, Lines, and Planes The most basic figures in geometry are undefined terms, which cannot be defined by using other figures. The undefined terms point, line, and plane are the building blocks of geometry. Holt Geometry 1-1 Understanding Points, Lines, and Planes Holt Geometry 1-1 Understanding Points, Lines, and Planes Points that lie on the same line are collinear. K, L, and M are collinear. K, L, and N are noncollinear. Points that lie on the same plane are coplanar. Otherwise they are noncoplanar. K L M N Holt Geometry 1-1 Understanding Points, Lines, and Planes Example 1: Naming Points, Lines, and Planes A. Name four coplanar points. A, B, C, D B. Name three lines. Possible answer: AE, BE, CE Holt Geometry 1-1 Understanding Points, Lines, and Planes Holt Geometry 1-1 Understanding Points, Lines, and Planes Example 2: Drawing Segments and Rays Draw and label each of the following. A. a segment with endpoints M and N. N M B. opposite rays with a common endpoint T. T Holt Geometry 1-1 Understanding Points, Lines, and Planes Check It Out! Example 2 Draw and label a ray with endpoint M that contains N.