The Development and Improvement of Instructions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Millimeter-Wave Metal Reflectarray Antennas with Sub-Wavelength Holes
electronics Article Millimeter-Wave Metal Reflectarray Antennas with Sub-Wavelength Holes Minwoo Yi * , Youngseok Bae and Sungjun Yoo Quantum Physics Technology Directorate, Agency for Defense Development, Daejeon 34186, Korea; [email protected] (Y.B.); [email protected] (S.Y.) * Correspondence: [email protected] Abstract: Reflectarray antennas composed of rectangular grooves with sub-wavelength holes on a metal plate are designed for millimeter-wave regions. All depths of multiple grooves in the metal reflectarray are elaborately manipulated for a high-gain reflector. A sub-wavelength hole in each groove reduces the mass of the reflectarray antenna, which rarely affects the re-radiated millimeter- wave filed from the groove. In this paper, we have demonstrated light high-gain reflectarray antennas and achieved a 25%-light reflectarray antenna compared with a metal reflectarray without sub- wavelength holes. The designed reflectarray antenna operates within the 15% wide-band bandwidth at 3 dB for millimeter-wave band. Keywords: reflectarray antenna; millimeter-wave; sub-wavelength holes; metal-only antenna 1. Introduction Citation: Yi, M.; Bae, Y.; Yoo, S. The reflectarray antenna was proposed in 1963 [1]. The reflectarray antenna consists Millimeter-Wave Metal Reflectarray of reflected phase arrays and a feed waveguide, which efficiently reflect electromagnetic Antennas with Sub-Wavelength waves. For the operation frequency, several reflectarrays have been intensively realized in Holes. Electronics 2021, 10, 945. the microwave [2,3], terahertz [4] and optical region [5,6]. https://doi.org/10.3390/ Reflectarray antennas utilizing printed-patch arrays are becoming considerable alter- electronics10080945 natives to solid parabolic reflectors due to numerous advantages such as their low profile, Academic Editor: Alejandro Melcón low weight, and ease of transportation and fabrication [7]. -

2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting
2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting Final Program 7–12 July 2019 Hilton Atlanta Atlanta, Georgia, U.S.A. Conference at a Glance Saturday, July 6 14:00-16:00 Strategic Planning Committee 16:15-17:15 AP-S Meetings Committee 17:15-18:15 JMC Meeting (Closed Session) 18:15-21:30 JMC Meeting, Dinner and Presentations 19:15-21:15 IEEE AP-S Constitution and Bylaws Committee Meeting & Dinner Sunday, July 7 08:00-10:00 Past Presidents’ Breakfast 10:00-18:00 AdCom Meeting 19:30-22:00 Welcome Dessert Reception at the Georgia Aquarium Monday, July 8 07:00-08:00 Amateur Radio Operators Breakfast 08:00-11:40 Technical Sessions 09:00-18:00 Technical Tour - “An Engineer’s Eye View” of the Mercedes Benz Stadium 12:00-13:20 Transactions on Antennas and Propagation Editorial Board Lunch Meeting 13:20-17:00 Technical Sessions 17:00-18:00 URSI Commission A Business Meeting 17:00-18:00 URSI Commission B Business Meeting 17:00-18:00 URSI Commissions C/E (combined) Business Meeting Tuesday, July 9 07:00-08:00 AP Magazine Staff Meeting 07:00-08:00 APS 2020 Committee Meeting 07:00-08:00 Industrial Initiatives 07:00-08:00 Membership Committee Meeting 07:00-08:00 Student Design Contest (Set-Up - Closed to Others) 07:00-08:00 Technical Committee on Antenna Measurement 08:00-11:40 Student Paper Competition 08:00-11:40 Technical Sessions 08:00-09:30 Student Design Contest (Demo for Judges - Closed to Others) 08:30-14:00 Standards Committee Meeting 09:30-12:00 Student Design Contest (Demo for Public) -

Reconfigurable Reflectarrays and Array Lenses for Dynamic Antenna Beam Control: a Review 3
IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. XX, NO. YY, MONTH 2013 1 Reconfigurable Reflectarrays and Array Lenses for Dynamic Antenna Beam Control: A Review Sean Victor Hum, Senior Member, IEEE, and Julien Perruisseau-Carrier, Senior Member, IEEE Abstract—Advances in reflectarrays and array lenses with gain antenna alternatives. Recently, researchers have become electronic beam-forming capabilities are enabling a host of new interested in electronically tunable versions of reflectarrays possibilities for these high-performance, low-cost antenna archi- and array lenses to realize reconfigurable beam-forming. By tectures. This paper reviews enabling technologies and topologies of reconfigurable reflectarray and array lens designs, and surveys making the scatterers in the aperture electronically tunable a range of experimental implementations and achievements that through the introduction of discrete elements such as varactor have been made in this area in recent years. The paper describes diodes, PIN diode switches, ferro-electric devices, and MEMS the fundamental design approaches employed in realizing recon- switches within the scatterer, the surface as a whole can be figurable designs, and explores advanced capabilities of these electronically shaped to adaptively synthesize a large range of nascent architectures, such as multi-band operation, polarization manipulation, frequency agility, and amplification. Finally, the antenna patterns. At high frequencies, tunable electromagnetic paper concludes by discussing future challenges and possibilities materials such as ferro-electric films, liquid crystals, and even for these antennas. new materials such as graphene can be used to as part of Index Terms—Reconfigurable antennas, reflectarrays, reflector the construction of the reflectarray elements to achieve the antennas, array lenses, transmitarrays, lens antennas, antenna ar- same effect. -

Technical Program
[WeA1] Small Antennas and RF Sensors Date / Time Oct. 24 (Wed.), 2018 / 13:00-14:40 Place Room A (Grand Ballroom 1) You-Chung Chung (Daegu University, Korea) Session Chairs Rangsan Wongsan (Suranaree University of Technology, Thailand) WeA1-1 13:00-13:20 TM02 Quarter Mode Substrate-Integrated Waveguide Resonator for Dual Sensing of Chemicals Ahmed Salim and Sungjoon Lim Chung-Ang University, Korea WeA1-2 13:20-13:40 Two-Element Compact Antenna Arrays with Four-Branch Diversity Using Directional Couplers and Phase Shifters Kengo Nishimoto, Yasuhiro Nishioka, and Naofumi Yoneda Mitsubishi Electric Corporation, Japan WeA1-3 13:40-14:00 Dual-Beam Steering Antenna Using Switchable Small Patches on PCB Based Square Patch Uaychai Yatongchai, Piyaphorn Meesawad, and Rangsan Wongsan Suranaree University of Technology, Thailand WeA1-4 14:00-14:20 Dual-Band Patch Antenna for Communication and Moisture Measurement of Coffee Bean Hwan-Sul Chang and You-Chung Chung Daegu University, Korea WeA1-5 14:20-14:40 Design of Electrically Small and Thin Huygens Source Antenna Su-Hyeon Lee, Sonapreetha Mohan Radha, Geonyeong Shin, and Ick-Jae Yoon Chungnam National University, Korea [WeB1] Channel Sounding and Estimation Date / Time Oct. 24 (Wed.), 2018 / 13:00-14:40 Place Room B (Grand Ballroom 2) Hisato Iwai (Doshisha University, Japan) Session Chairs Jae-Young Chung (Seoul National University of Science and Technology, Korea) WeB1-1 13:00-13:20 Investigation of Channel Properties for 28 GHz Band in Urban Street Microcell Environments Minoru Inomata, Tetsuro -
Reflectarray Antennas
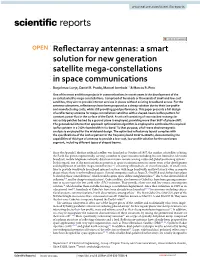
www.nature.com/scientificreports OPEN Refectarray antennas: a smart solution for new generation satellite mega‑constellations in space communications Borja Imaz‑Lueje, Daniel R. Prado, Manuel Arrebola* & Marcos R. Pino One of the most ambitious projects in communications in recent years is the development of the so‑called satellite mega‑constellations. Comprised of hundreds or thousands of small and low‑cost satellites, they aim to provide internet services in places without existing broadband access. For the antenna subsystem, refectarrays have been proposed as a cheap solution due to their low profle and manufacturing costs, while still providing good performance. This paper presents a full design of a refectarray antenna for mega‑constellation satellites with a shaped‑beam isofux pattern for constant power fux in the surface of the Earth. A unit cell consisting of two stacked rectangular microstrip patches backed by a ground plane is employed, providing more than 360° of phase‑shift. The generalized intersection approach optimization algorithm is employed to synthesize the required isofux pattern in a 2 GHz bandwidth in Ku‑band. To that purpose, a full‑wave electromagnetic analysis is employed for the wideband design. The optimized refectarray layout complies with the specifcations of the isofux pattern in the frequency band 16 GHz–18 GHz, demonstrating the capabilities of this type of antenna to provide a low‑cost, low‑profle solution for the user beam segment, including diferent types of shaped beams. Since the Sputnik I, the frst artifcial satellite, was launched in October of 1957, the number of satellites orbiting the Earth has grown exponentially, serving a number of space missions including, but not limited to, television broadcast, mobile telephone networks, data transmission, remote sensing, radar and global positioning systems 1. -

Reflectarray Antennas: a Review
Forum for Electromagnetic Research Methods and Application Technologies (FERMAT) Reflectarray antennas: A review Eduardo Carrasco (1) and Jose A. Encinar (2) (1) Foundation for Research on Information Technologies in Society (IT’IS) (Email: [email protected]) (2) Universidad Politécnica de Madrid (Email: [email protected]) Abstract—Reflectarray antennas have attracted special attention for implementing high gain antennas as they combine some advantages of phased arrays and reflectors, such as low losses, ease of manufacture in flat panels, low cross polarization and the possibility of an electronic control of the beam. This paper reviews different contributions in reflectarrays from fixed-beam to reconfigurable-beam implementations in single and multilayer configurations, including applications for linear and circular polarization, single and multiple beams, pencil and shaped beams, considering single and dual reflectarray configurations. Index Terms—reflectarray, reflectarray cells, (a) reconfigurable reflectarrays. I. INTRODUCTION The IEEE Standard for Definitions on Terms for Antennas [1], designates a reflectarray as: “An antenna consisting of a feed and an array of reflecting elements arranged on a surface and adjusted so that the reflected waves from the individual elements combine to produce a prescribed secondary radiation pattern”. According to the standard, other accepted synonyms for this kind of antenna are “reflective array antenna” and “reactive reflector antenna”. Because of their advantages if compared to phased-arrays and parabolic reflectors, reflectarray antennas have attracted great attention in the last years [2]. Fig. 1 shows the general architecture of a printed reflectarray working in transmission (b) mode. In that case, a pyramidal horn is used as a feed, but Fig. -

Mechanically Reconfigurable, Beam-Scanning
applied sciences Review Mechanically Reconfigurable, Beam-Scanning Reflectarray and Transmitarray Antennas: A Review Mirhamed Mirmozafari *,† , Zongtang Zhang † , Meng Gao †, Jiahao Zhao †, Mohammad Mahdi Honari †, John H. Booske and Nader Behdad Department of Electrical and Computer Engineering, University of Wisconsin-Madison, Madison, WI 53706, USA; [email protected] (Z.Z.); [email protected] (M.G.); [email protected] (J.Z.); [email protected] (M.M.H.); [email protected] (J.H.B.); [email protected] (N.B.) * Correspondence: [email protected] † These authors contributed equally to this work. Abstract: We review mechanically reconfigurable reflectarray (RA) and transmitarray (TA) antennas. We categorize the proposed approaches into three major groups followed by a hybrid category that is made up of a combination of the three major approaches. We discuss the examples in each category and compare their performance metrics including aperture efficiency, gain, bandwidth and scanning range and resolution. We also identify opportunities to build upon or extend these demonstrated approaches to realize further advances in antenna performance. Keywords: reconfigurable antennas; reflectarray antennas; transmitarray antennas; mechanically beam-scanning; scanning range Citation: Mirmozafari, M.; Zhang, Z.; 1. Introduction Gao, M.; Zhao, J.; Honari, M.M.; The advent of modern applications requiring antenna arrays with flexible scanning ca- Booske, J.H.; Behdad, N. pabilities has turned agile beam-scanning antenna design into an active area of research [1]. Mechanically Reconfigurable, Some of these diverse applications include automotive radars, weather observations, air Beam-Scanning Reflectarray and surveillance [2] and satellite communication (SatCom) [3]. The stringent requirements of Transmitarray Antennas: A Review. these applications limit the antenna options to the following: (i) conventional mechanically- Appl. -
A Nested Square-Shape Dielectric Resonator for Microwave Band Antenna Applications
International Journal of Electrical and Computer Engineering (IJECE) Vol. 11, No. 1, February 2021, pp. 481~488 ISSN: 2088-8708, DOI: 10.11591/ijece.v11i1.pp481-488 481 A nested square-shape dielectric resonator for microwave band antenna applications Ubaid Ullah1, Ismail Ben Mabrouk2, Muath Al-Hasan3, Mourad Nedil4, Mohd Fadzil Ain5 1,2,3Networks and Communication Engineering Department, Al Ain University, United Arab Emirates 4Engineering Department, Université de Québec, Canada 5School of Electrical and Electronic Engineering, Universiti Sains Malaysia, Malaysia Article Info ABSTRACT Article history: In this paper, a nested square-shape dielectric resonator (NSDR) has been designed and investigated for antenna applications in the microwave band. Received Jan 2, 2020 A solid square dielectric resonator (SSDR) was modified systematically by Revised Jun 30, 2020 introducing air-gap in the azimuth (ϕ-direction). By retaining the square Accepted Jul 13, 2020 shape of the dielectric resonator (DR), the well-known analysis tools can be applied to evaluate the performance of the NSDR. To validate the performance of the proposed NSDR in antenna applications, theoretical, Keywords: simulation, and experimental analysis of the subject has been performed. A simple microstrip-line feeding source printed on the top of Rogers RO4003 Dielectric resonator antenna grounded substrate was utilized without any external matching network. Microwave band Unlike solid square DR, the proposed NSDR considerably improves Nested square-shape dielectric the impedance bandwidth. The proposed antenna has been prototyped and Square-shape dielectric experimentally validated. The antenna operates in the range of 12.34 GHz Wideband antenna to 21.7 GHz which corresponds to 56% percentage bandwidth with peak realized gain 6.5 dB. -

A Ka-Band Cylindrical Paneled Reflectarray Antenna
Article A Ka-Band Cylindrical Paneled Reflectarray Antenna Francesco Greco, Luigi Boccia, Emilio Arnieri * and Giandomenico Amendola DIMES—Dept. Computer, Modeling, Electronics, and Systems Engineering, University of Calabria, 87036 Rende (CS), Italy; [email protected] (F.G.); [email protected] (L.B.); [email protected] (G.A.) * Correspondence: [email protected]; Tel.: +390984494701 Received: 13 May 2019; Accepted: 3 June 2019; Published: 10 June 2019 Abstract: Cylindrical parabolic reflectors have been widely used in those applications requiring high gain antennas. Their design is dictated by the geometric relation of the parabola, which relate the feed location, f, to the radiating aperture, D. In this work, the use of reflectarrays is proposed to increase D without changing the feed location. In the proposed approach, the reflecting surface is loaded with dielectric panels where the phase of the reflected field is controlled using continuous metal strips of variable widths. This solution is enabled by the cylindrical symmetry and, with respect to rectangular patches or to other discrete antennas, it provides increased gain. The proposed concept has been evaluated by designing a Ka-band antenna operating in the Rx SatCom band (19–21 GHz). A prototype has been designed and the results compared with the ones of a parabolic cylindrical reflector using the same feed architecture. Simulated results have shown how this type of antenna can provide higher gain in comparison to the parabolic counterpart, reaching a radiation efficiency of 65%. Keywords: reflectarray; Ka-band; reflector antennas 1. Introduction Reflectarray antennas have been among the most popular research topics of the last decades. -

Circularly Polarized Rectifying Reflectarray Antenna at C-Band
32nd URSI GASS, Montreal, 19-26 August 2017 Circularly Polarized Rectifying Reflectarray Antenna at C-band H.A. Malhat(1), H.A. El-Araby(2) and S.H. Zainud-Deen (3) (1),(3) Faculty of Electronic Eng., Menoufia University, Egypt. (2) Hydro-Power Plants Executive Authority, Ministry of Electricity and Energy, Egypt. [email protected] [email protected] [email protected] Abstract GHz, comprising of 1000 dipole elements has been designed in [6]. However, in the array rectenna design, In this paper, circularly polarized rectifying reflectarray there are several problems, such as: the relatively high loss antenna has been proposed. Cylindrical dielectric resonator of array feeding networks, difficulty in feeding network (CDRA) antenna is used to exhibit left-hand and right-hand design, thus causing lower rectenna array performance. circular polarizations. As well, the antenna operates in a Recently, rectenna systems using reflectarrays instead of linear polarization mode on the basis of the bias states of array antenna elements have been demonstrated. The two PIN diodes. The antenna is used to feed the reflectarray reflectarray is used for concentrating the incident waves on to increase its gain in a certain direction. A single piece of the receiving antenna. Due to the high gain property of the dielectric material sheet is divided into 17x17 unit-cell reflectarray, the combined rectenna array can be expected elements to build up the reflectarray. Each unit cell has four to achieve higher output power with a smaller area. An 8×1 circular holes of equal diameters and is supported on the rectenna array is designed as a feed antenna of the perfect conducting ground plane. -
Beam-Scanning Reflectarray Antennas a Technical Overview and State of the Art
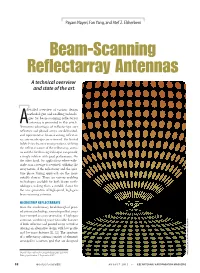
Payam Nayeri, Fan Yang, and Atef Z. Elsherbeni Beam-Scanning Reflectarray Antennas A technical overview and state of the art. detailed overview of various design methodologies and enabling technolo- gies for beam-scanning reflectarray antennas is presented in this article. ANumerous advantages of reflectarrays over reflectors and phased arrays are delineated, and representative beam-scanning reflectar- ray antenna designs are reviewed. For limited field-of-view beam-scanning systems, utilizing the reflector nature of the reflectarray anten- na and the feed-tuning technique can provide a simple solution with good performance. On the other hand, for applications where wide- angle scan coverage is required, utilizing the array nature of the reflectarray and the aper- ture phase-tuning approach are the more suitable choices. There are various enabling technologies available for both design meth- odologies, making them a suitable choice for the new generation of high-speed, high-gain beam-scanning antennas. MICROSTRIP REFLECTARRAYS Since the revolutionary breakthrough of print- ed antenna technology, microstrip reflectarrays have emerged as a new generation of high-gain antennas, combining many favorable features of both reflectors and printed arrays as well as offering an alternative design with low-profile and low-mass features [1], [2]. The aperture of a reflectarray antenna consists of elements arranged in a certain grid that are designed Digital Object Identifier 10.1109/MAP.2015.2453883 IMAGE LICENSED BY INGRAM PUBLISHING LICENSED BY IMAGE Date of publication: 1 September 2015 32 1045-9243/15©2015IEEE AUGUST 2015 IEEE ANTENNAS & PROpaGATION MAGAZINE to collimate the main beam of the antenna by controlling the BEAM-SCANNING REFLECTARRAY ANTENNAS phase of the reflected wave, as shown in Figure 1. -
Holographic Transmitarray Antenna with Linear Polarization in X Band
Holographic Transmitarray Antenna with linear Polarization in X band Mahdi Salehi ( [email protected] ) Iran University of Science and Technology https://orcid.org/0000-0003-1182-1608 Homayoon Oraizi Iran University of Science and Technology Research Article Keywords: Holographic Transmitarray, Metasurface, Articial Impedance Surface, Wideband, Transmission Impedance Surface Posted Date: April 27th, 2021 DOI: https://doi.org/10.21203/rs.3.rs-468556/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License Holographic Transmitarray Antenna with linear Polarization in X band Mahdi Salehi1,* and Homayoon Oraizi2 1Iran University of Science and Technology, Electrical Engineering, Tehran, 16846-13114, Iran 2Iran University of Science and Technology, Electrical Engineering, Tehran, 16846-13114, Iran *mahdi [email protected] ABSTRACT In this paper, we present the design and demonstration of transmitarray antennas (TAs) based on the holographic technique for the first time. According to the holographic theory, the amplitudes and phases of electromagnetic waves can be recorded on a surface, and then they can be reconstructed independently. This concept is used to design single-beam and multi-beam linearly polarized holographic TAs without using any iterative optimization algorithms. Initially, a transmission impedance surface is analyzed and compared with the reflection one. Then, interferograms associated with the scalar admittance distribution are defined according to the number and direction of the radiation beams. After that, a transmission metasurface of dimensions equal to 0.26λ0 is hired to design holographic TAs at 12 GHz. Several examples are provided to support the method. In the end, a linearly polarized circular aperture wideband holographic transmitarray antenna with a radius of 13.3 cm has been manufactured and tested.