Η Εκπαιδευτική Ρομποτική Στην Ειδική Αγωγή (Educational Robotics in Special Needs Education.)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
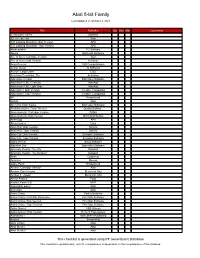
Atari 8-Bit Family
Atari 8-bit Family Last Updated on October 2, 2021 Title Publisher Qty Box Man Comments 221B Baker Street Datasoft 3D Tic-Tac-Toe Atari 747 Landing Simulator: Disk Version APX 747 Landing Simulator: Tape Version APX Abracadabra TG Software Abuse Softsmith Software Ace of Aces: Cartridge Version Atari Ace of Aces: Disk Version Accolade Acey-Deucey L&S Computerware Action Quest JV Software Action!: Large Label OSS Activision Decathlon, The Activision Adventure Creator Spinnaker Software Adventure II XE: Charcoal AtariAge Adventure II XE: Light Gray AtariAge Adventure!: Disk Version Creative Computing Adventure!: Tape Version Creative Computing AE Broderbund Airball Atari Alf in the Color Caves Spinnaker Software Ali Baba and the Forty Thieves Quality Software Alien Ambush: Cartridge Version DANA Alien Ambush: Disk Version Micro Distributors Alien Egg APX Alien Garden Epyx Alien Hell: Disk Version Syncro Alien Hell: Tape Version Syncro Alley Cat: Disk Version Synapse Software Alley Cat: Tape Version Synapse Software Alpha Shield Sirius Software Alphabet Zoo Spinnaker Software Alternate Reality: The City Datasoft Alternate Reality: The Dungeon Datasoft Ankh Datamost Anteater Romox Apple Panic Broderbund Archon: Cartridge Version Atari Archon: Disk Version Electronic Arts Archon II - Adept Electronic Arts Armor Assault Epyx Assault Force 3-D MPP Assembler Editor Atari Asteroids Atari Astro Chase Parker Brothers Astro Chase: First Star Rerelease First Star Software Astro Chase: Disk Version First Star Software Astro Chase: Tape Version First Star Software Astro-Grover CBS Games Astro-Grover: Disk Version Hi-Tech Expressions Astronomy I Main Street Publishing Asylum ScreenPlay Atari LOGO Atari Atari Music I Atari Atari Music II Atari This checklist is generated using RF Generation's Database This checklist is updated daily, and it's completeness is dependent on the completeness of the database. -

Technology: Window to the Future
DOCUMENT RESUME ED 316 193 IR 014 181 AUTHOR Bright, George W., Ed.; Origassy, Mary Louise, Ed. TITLE Technology: Window to the Future. Proceedings of the Annual State Conference of the Texas Computer Education Association (9th, Houston, Texas, March 5-7, 1989). INSTITUTION Texas Computer Education Association, Lubbock. PUB DATE Mar 89 NOTE 244p.; For the proceedings of the 1988 conference, see ED 315 044. Variable type fonts throughout. PUB TYPE Collected Works - Conference Proceedings (021) -- Reports - Descriptive (141) -- Reports - Research /Technical (143) EDRS PRICE MF01/PC10 Plus Postage. DESCRIPTORS *Administration; Computer Literacy; Computer Science Education; *Computer Software; *Computer Uses in Education; Desktop Publishing; Elementary School Curriculum; Elementary Secondary Education; Higher Education; *Language Arts; *Mathematics Instruction; *Microcomputers; Science Education; Social Studies; Special Education IDENTIFIERS *Texas Computer Education Association ABSTRACT This proceedings crpilation presents papers on administration, computer literacy, computer science, desktop publishing, elementary education, hardware and software, language arts, mathematics, media, music and art, science, social studies, and special education. The 130 papers are arranged alphabetically by author's name and a subject index listing by author is provided. (GL) *********************************************************************** * Reproductions supplied by EDRS are the best that can be made * * from the original document. * ********************************************************************** U.S. DEPARTMENT OF EDUCATION Office of Educational Research and Improvement EDUCATIONAL RESOURCES INFORMATION CENTER (ERIC) This document has been reproduced as 'cowed from the person or organization originating it O Minor changes have been made toimprove reproduction Quality Points of view or opinions staled in thisdocu mint do not necessarily representofficial OERI position or policy 1,A 1111 a L. Of; rt k t I "61' ,, A 1-7 '04 Y. -

Logo Tree Project
LOGO TREE PROJECT Written by P. Boytchev e-mail: pavel2008-AT-elica-DOT-net Rev 1.82 July, 2011 We’d like to thank all the people all over the globe and all over the alphabet who helped us build the Logo Tree: A .........Daniel Ajoy, Eduardo de Antueno, Hal Abelson B .........Andrew Begel, Carl Bogardus, Dominique Bille, George Birbilis, Ian Bicking, Imre Bornemisza, Joshua Bell, Luis Belmonte, Vladimir Batagelj, Wayne Burnett C .........Charlie, David Costanzo, John St. Clair, Loïc Le Coq, Oliver Schmidt-Chevalier, Paul Cockshott D .........Andy Dent, Kent Paul Dolan, Marcelo Duschkin, Mike Doyle E..........G. A. Edgar, Mustafa Elsheikh, Randall Embry F..........Damien Ferey, G .........Bill Glass, Jim Goebel, H .........Brian Harvey, Jamie Hunter, Jim Howe, Markus Hunke, Rachel Hestilow I........... J..........Ken Johnson K .........Eric Klopfer, Leigh Klotz, Susumu Kanemune L..........Janny Looyenga, Jean-François Lucas, Lionel Laské, Timothy Lipetz M.........Andreas Micheler, Bakhtiar Mikhak, George Mills, Greg Michaelson, Lorenzo Masetti, Michael Malien, Sébastien Magdelyns, Silvano Malfatti N .........Chaker Nakhli ,Dani Novak, Takeshi Nishiki O ......... P..........Paliokas Ioannis, U. B. Pavanaja, Wendy Petti Q ......... R .........Clem Rutter, Emmanuel Roche S..........Bojidar Sendov, Brian Silverman, Cynthia Solomon, Daniel Sanderson, Gene Sullivan, T..........Austin Tate, Gary Teachout, Graham Toal, Marcin Truszel, Peter Tomcsanyi, Seth Tisue, Gene Thail U .........Peter Ulrich V .........Carlo Maria Vireca, Álvaro Valdes W.........Arnie Widdowson, Uri Wilensky X ......... Y .........Andy Yeh, Ben Yates Z.......... Introduction The main goal of the Logo Tree project is to build a genealogical tree of new and old Logo implementations. This tree is expected to clearly demonstrate the evolution, the diversity and the vitality of Logo as a programming language. -

Winter 1992/1993
Journal of the ISTE i L 0 G 0 speclalf~rtr:;~-~~~~ A Educators •• t• EXCHANGE Winter 1992 Volume 11 Number 2 In this issue: African Textiles or The Weaving Turtle Also Will Logo Survive? Exploring the CHAR Primitive of Logo Writer on Your IBM International Society for Technology in Education Logo Exchange ISTE •1787 Agate Street • Eugene, OR 97403-1923 • InterNet: ISTE@ Oregon.uoregon.edu 503/346-4414 • ISTE Order Desk: 800/336-5191 Founding Editor ISTE Board of Directors Tom Lough Sally A. Sloan, President David Moursund, Executive Officer Editor-In-Chief Dennis L. Bybee, Associate Executive Officer Sharon Yoder Assistant Editor Executive Board Members Ron Renchler Lajeane Thomas, President-Elect Barry Pitsch, Secretary/Treasurer International Editor Bonnie Marks, Past-President Dennis Harper M.G. (Peggy) Kelly Contributing Editors DonKnezek Eadie Adamson Board Members Gina Bull Kim Allen Ruthie Blankenbaker Glen Bull David Brittain Francisco Caracheo Doug Clements Sheila Cory Terry Gross Sandy Dawson Gail Morse Connie Stout Dorothy Fitch Mark Homey Ex-Officio Board Members Roy Bhagaloo, DP/MIS Special Appointment SIGLogo Board of Directors Nolan Estes, International Initiatives Lora Friedman, President Kathleen Hurley, Industry Representative Bev and Lee Cunningham, Marco Murray-Lasso, Director of Developing Country Secretary /Treasurer Initiatives C. Dianne Martin, Policy and Leadership Representative Production Assistance Alfonso Ramirez Ortega, Director of l.Jltin American Donella Ingham Initiatives Paul Resta, International Initiatives -

November 1986
The Magazine for LOGO Activities Worldwide ISSN 0888-6970 VOLUME 5 NUMBER 3 NOVEMBER 1986 \fiN 'J9lS90JOM Meckler Publishing Corporation 9l# l!WJ9d P!ed a6e1sod ·s·n a1el:l >una University of Virginia Summer Logo Fellowship Program 1986-1987 What is the UV A Summer Logo What other qualifications are important? Fellowship Program? Fellowship recipients must possess exceptional An opportunity for educators to come to the communication skills and initiative, be able to work University of Virginia for a three week summer well with others, and be highly motivated about the period of individual Logo related study. possibilities for using Logo in education. What are the objectives of the Logo What is the application process? Fellowship program? Applicants should write immediately to the The objectives are to: University of Virginia Summer Logo Fellowship Encourage the development of innovative Program, Curry School of Education, Ruffner Logo projects in all grade levels and subject areas Hall, Charlottesville, VA 22901, requesting the Disseminate Logo projects produced by the application forms. Applications will be mailed in fellowship program late October. Completed applications are to be Provide fellowship recipients with time and returned to the University of Virginia before resources for study, work, and growth December 20, 1986. A selection committee will evaluate the applications and choose a group of fmalists, from which the two fellowship recipients When does the fellowship program for 1987 will be named. operate? The next fellowship period of study will begin What are the fellowship expectations? June 1987. The application cycle for this period begins in October 1986. A Logo fellowship recipient is expected to plan and begin carrying out a self-designed Logo-related project during the fellowship period. -

Didaktické Využití Stavebnice LEGO Mindstorms Ve Výuce Matematiky Se Zaměřením Na Fraktály
Univerzita Karlova v Praze Pedagogická fakulta Katedra matematiky a didaktiky matematiky Didaktické využití stavebnice LEGO Mindstorms ve výuce matematiky se zaměřením na fraktály Autor: Bc. Jan Čadek Vedoucí práce: doc. RNDr. Antonín Jančařík, Ph.D. Praha 2016 PROHLÁŠENÍ: Prohlašuji, že jsem diplomovou práci na téma Didaktické využití stavebnice LEGO Mindstorms ve výuce matematiky se zaměřením na fraktály vypracoval pod vedením doc. RNDr. Antonína Jančaříka, Ph.D. samostatně na základě vlastních zjištění a za použití pramenů uvedených v seznamu. Praha, 13. července 2016 …………………………………… Bc. Jan Čadek PODĚKOVÁNÍ: Rád bych touto cestou poděkoval doc. RNDr. Antonínu Jančaříkovi, Ph.D. za jeho cenné rady a trpělivost při vedení mé práce. Rovněž bych chtěl poděkovat Mgr. Danielu Tocháčkovi za zprostředkování zápůjčky robotické stavebnice LEGO Mindstorms NXT z KITTV PedF UK. Velký dík patří ještě mé rodině, Milanovi, Kátě, Šárce, Evině, Ryanovi a Davidovi. NÁZEV: Didaktické využití stavebnice LEGO Mindstorms ve výuce matematiky se zaměřením na fraktály ABSTRAKT: Cílem této diplomové práce je zjistit, zda má výuka fraktální geometrie podpořená počítačem a robotickou stavebnicí LEGO Mindstorms NXT své místo ve vzdělávání žáků základních a středních škol v České republice. Teoretická část práce se věnuje klíčovým tématům a osobnostem, které s touto problematikou úzce souvisí, obsahuje též stručný historický přehled vývoje fraktální geometrie a její možnosti využití ve výuce matematiky (s odkazem na turecké kurikulární dokumenty), a popis stavebnice LEGO Mindstorms NXT, který může dobře posloužit i jako manuál pro učitele či žáky. Praktická část obsahuje kromě návodu na stavbu robotické želvy také návrh výukového bloku, jehož cílem je u žáků podpořit algoritmické a geometrické myšlení, včetně klíčových kompetencí. -

Contributors
List of Contributors Max Behensky W. Daniel Hillis Jeanry Chandler Julie Minsky Susan Cotten Margaret Minsky James Davis Marvin Minsky Lisa Delpit Toby Mintz Annette Dula Keith Sharman Gregory Gargarian Cynthia Solomon Michael Grandfield Erric Solomon Brian Harvey William Weinreb Edward Hardebeck Lauren Young Introduction LogoWorks: Challenging Prograinsdn Logo is for beginning and advanced Logo programmers who want suggestions of things to do that go beyond an introductory level. The projects touch on diverse areas of interest: from graphics and video games to word games, language extensions, and devel- opment of new languages. Each project is intended for your exploration and to suggest other worlds you can build yourself. We think this book will draw attention to Logo as a general-purpose programming language as well as a powerful tool for thinking. LogoWorks demonstrates that Logo is not only good for young children, but also pro- vides people of all ages with compelling and challenging worlds to explore. We have tried to show a diversity of projects and programming styles as well as ways of talking about the projects. The descriptions of the various projects vary in their details and their points of view. To help in meeting our goal, we encouraged many people to contribute to the book. This eventually presented us with a problem: we did not want to obscure the individual personalities represented in each of the projects. We see this as an important and necessary element in the rich development of Logo computer cultures. On the other hand, we wanted to maintain a consistency in the quality of each project. -

Logo Tree Rev 2.07 - January, 2016
Logo Tree Rev 2.07 - January, 2016 No Name URL Years Version Status Platform Inspirer Authors 1. *Logo 1989-1994 1.1 Dead Connection Machine 2 MultiLogo(1) Mitchel Resnick (MIT Media Lab) 2. 11LOGO ftp://publications.ai.mit.edu/ai-publications/pdf/AIM-307a.pdf 1973-1974 Dead PDP-11 BBN Logo http://portal.acm.org/citation.cfm?id=382172.383022&dl=GUIDE&dl=AC Peter Ross, Ken Johnson (Edinburgh University, Research 3. 380z Logo M&idx=J692&part=periodical&WantType=periodical&title=ACM%20SIGS 1981 n/a Dead RML 380z Edinburgh Logo MALL%2FPC%20Notes Machines) 4. 3D Logo(1) http://apple2history.org/spotlight/mike-westerfield-the-byte-works 1993-1994 1.0.2 Dead Apple IIGS LSCI Apple II Logo Mike Westerfield (Byte Works) 5. 3D Logo(3) Peter Macleod 6. 3D-Logo(2) 1985 Dead PC-9801(MS-DOS ) http://portal.acm.org/citation.cfm?id=382172.383022&dl=GUIDE&dl=AC Peter Ross, Ken Johnson (Edinburgh University, Research 7. 480z Logo M&idx=J692&part=periodical&WantType=periodical&title=ACM%20SIGS 1982 n/a Dead RML 480z 380z Logo MALL%2FPC%20Notes Machines) 8. 5271Logo http://www.nostalgia8.nl/drlogo.htm 2005 n/a Frozen IBM 3270 PC(model 5271) Apricot F1 http://en.wikipedia.org/wiki/Acornsoft_Logo, Acorn BBC micro, Acorn 9. Acornsoft Logo 1983-1985 Dead MIT Apple Logo Acornsoft http://www.nostalgia8.nl/logo/docs/mudeel1.jpg Electron 10. ACSLogo http://www.alancsmith.co.uk/logo 1994-2009 1.4f Active OS X Amiga Logo 11. ACTI-LOGO http://roble.pntic.mec.es/-apantoja/familias.htm 1987 Dead MS-DOS LCSI Logo II (ACT Informatique, Idealogic) http://adalogo.cuong.net, http://w3studi.informatik.uni-stuttgart.de/- 2005-10-21 Hailang Thai, Minh Tran, Lesmana Zimmer (Stuttgart 12. -

History of Logo
UC Berkeley UC Berkeley Previously Published Works Title History of Logo Permalink https://escholarship.org/uc/item/1623m1p3 Journal Proceedings of the ACM on Programming Languages, 4(HOPL) ISSN 2475-1421 Authors Solomon, C Harvey, B Kahn, K et al. Publication Date 2020-06-12 DOI 10.1145/3386329 License https://creativecommons.org/licenses/by-nc-sa/4.0/ 4.0 Peer reviewed eScholarship.org Powered by the California Digital Library University of California History of Logo CYNTHIA SOLOMON, Cynthia Solomon Consulting, USA BRIAN HARVEY, University of California, Berkeley, USA KEN KAHN, University of Oxford, UK HENRY LIEBERMAN, MIT Computer Science and Artificial Intelligence Lab (CSAIL), USA MARK L. MILLER, Learningtech.org, USA MARGARET MINSKY, New York University-Shanghai, China ARTEMIS PAPERT, Independent artist, Canada BRIAN SILVERMAN, Playful Invention Co., Canada Shepherd: Tomas Petricek, University of Kent, UK Logo is more than a programming language. It is a learning environment where children explore mathematical ideas and create projects of their own design. Logo, the first programming language explicitly designed for children, was invented by Seymour Papert, Wallace Feurzeig, Daniel Bobrow, and Cynthia Solomon in 1966 at Bolt, Beranek and Newman, Inc. (BBN). Logo’s design drew upon two theoretical frameworks: Jean Piaget’s constructivism and Marvin Minsky’s artificial intelligence research at MIT. One of Logo’s foundational ideas was that children shouldhavea powerful programming environment. Early Lisp served as a model with its symbolic computation, recursive functions, operations on linked lists, and dynamic scoping of variables. Logo became a symbol for change in elementary mathematics education and in the nature of school itself. -

79 History of Logo
History of Logo CYNTHIA SOLOMON, Cynthia Solomon Consulting, USA BRIAN HARVEY, University of California, Berkeley, USA KEN KAHN, University of Oxford, UK HENRY LIEBERMAN, MIT Computer Science and Artificial Intelligence Lab (CSAIL), USA MARK L. MILLER, Learningtech.org, USA MARGARET MINSKY, New York University-Shanghai, China ARTEMIS PAPERT, Independent artist, Canada BRIAN SILVERMAN, Playful Invention Co., Canada Shepherd: Tomas Petricek, University of Kent, UK Logo is more than a programming language. It is a learning environment where children explore mathematical ideas and create projects of their own design. Logo, the first programming language explicitly designed for children, was invented by Seymour Papert, Wallace Feurzeig, Daniel Bobrow, and Cynthia Solomon in 1966 at Bolt, Beranek and Newman, Inc. (BBN). Logo’s design drew upon two theoretical frameworks: Jean Piaget’s constructivism and Marvin Minsky’s artificial intelligence research at MIT. One of Logo’s foundational ideas was that children shouldhavea powerful programming environment. Early Lisp served as a model with its symbolic computation, recursive functions, operations on linked lists, and dynamic scoping of variables. Logo became a symbol for change in elementary mathematics education and in the nature of school itself. The search for harnessing the computer’s potential to provide new ways of teaching and learning became a central focus and guiding principle in Logo language development. It encompassed a widening scope that included natural language, music, graphics, -

February 1987
The Magazine for LOGO Activities Worldwide ISSN 0888-6970 VOLUME 5 NUMBER 6 FEBRUARY 1987 saO !HO 5U!I!eli\J LPP'v' pue 1::> 'lJOd!SaM Meckler Publishing Corporation 5U!PUad sse1::> puooas I SPECIAL ANNOUNCEMENT I 1\vo conferences In onel 2nd West Coast Logo Learn about Model Conference and Curriculum Standards using technology as Telecommunications a tool Telecommuni cations in the language arts curriculum Using Symposium technology in your classroom LogoWriter in the language arts March 6·7, 1987 curriculum Logo as a problem-solving tool Hilton Hotel & Towers, Los Angeles Airport Telecommunications and data bases in Limited Registration the social science classroom Using • Hands-on workshops Logo within the math • Guest speakers framework Integrating David Thornburg technology and the Seymour Papert curriculum Logo in the high school classroom Dan and Molly Watt Telecommunications AI Rogers in the secondary Bernie and June Dodge school curriculum and many more • Teacher presentations • Panel discussions • Meet-the-leader sessions For further details: West Coast Logo Conference Telecommunications Symposium Pepperdine University 3415 Sepulveda Boulevard Los Angeles, CA 90034 AAAI.OGO II t tfEXCHANGE I The Magazine for LOGO Activities Worldwide ISSN 0888-6970 VOLUME 5 NUMBER 6 FEBRUARY 1987 Editor-in-Chief Tom Lough CONTENTS International Editor Dennis Harper Senior Editors From the Editor------------ 2 Glen Bull Listen, My Children, and You Shall Hear 3 Steve Tipps Tipps for Teachers 4 Field Editors Eduardo Cavallo Teacher Feature------------- 7 Patricia Dowling Teaching Tools------------- 9 Michael Friendly TO BEOIN :CIRCLES --------- 13 Anne McDougall Logo LinX ________________ Richard Noss 15 Fatimata Seye Sylla MathWorlds _______________ 17 Senior Contributing Editor Testudinal Testimony 20 Robs Muir 22 Contributing Editors Logo Disserts --------------- Elaine Blitman Teacher to Teacher 22 Regina Bowden The Adventures of Jacques and Elsie 24 Doug Clements 25 Paula Cochran IntLXual Challenges----------- Bill Craig A. -

Logo Tree Project
LOGO TREE PROJECT Written by P. Boytchev e-mail: pavel2008-AT-elica-DOT-net alternative e-mail: pavel-DOT-boytchev-AT-gmail-DOT-com Rev 2.13 October, 2014 We’d like to thank all the people all over the globe and all over the alphabet who helped us build the Logo Tree: Álvaro Valdes Eric Klopfer Martin v.d. Steenoven Andrea diSessa Frederick Reinders Michael Malien Andreas Micheler G. A. Edgar Michael Tempel Andrew Begel Gary Teachout Michael Toner Andy Dent Gene Sullivan, Michele Berionne Andy Yeh Gene Thail Mike Doyle Angel Lopez George Birbilis Mike Westerfield Anna Baccaglini-Frank George Mills Minh Cuong Tran Arnan (Roger) Sipitakiat Graham Toal Mitchel Resnick Arnie Widdowson Greg Michaelson Mustafa Elsheikh Arthur Nunes-Harwitt Guy Haas Neil Fraser Austin Tate Hal Abelson Noel Evans Bakhtiar Mikhak Ian Bicking Oliver Schmidt-Chevalier Ben Cotterell Imre Bornemisza Paliokas Ioannis Ben Yates Jamie Hunter Paul Cockshott Bill Glass Jamilson Campos Pavel Boytchev Bill Kendrick Janny Looyenga Peter Burka Bojidar Sendov Jean-François Lucas Peter Tomcsanyi Brian Harvey Jim Goebel, Peter Ulrich Brian Silverman Jim Howe Rachel Hestilow Carl Bogardus John St. Clair Randall Embry Carlo Maria Vireca Joshua Bell Richard Bos Chaker Nakhli Ken Johnson Richard Drake Charlie Kent Paul Dolan Sébastien Magdelyns Clem Rutter Kovács Zoltán Seth Tisue Cynthia Solomon Leigh Klotz Silvano Malfatti Damien Ferey Lionel Laské Stefan Hesseling Dani Novak Loïc Le Coq Susumu Kanemune Daniel Ajoy Lorenzo Masetti Takeshi Nishiki Daniel Sanderson Lucio Thomas Figg Daniel Wendel Luis Belmonte Timothy Lipetz David Costanzo Marcelo Duschkin U. B. Pavanaja David Smith Marcin Truszel Uri Wilensky Dominique Bille Mark Friedman Vladimir Batagelj Douglas Blank Marko Živković Wally Feurzeig (1927-2013) Eduardo de Antueno Markus Hunke Wayne Burnett Emmanuel Roche Marshal Anderson Wendy Petti Introduction The main goal of the Logo Tree project is to build a genealogical tree of new and old Logo implementations.