Asteroids. from Observations to Models. D
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Observations from Orbiting Platforms 219
Dotto et al.: Observations from Orbiting Platforms 219 Observations from Orbiting Platforms E. Dotto Istituto Nazionale di Astrofisica Osservatorio Astronomico di Torino M. A. Barucci Observatoire de Paris T. G. Müller Max-Planck-Institut für Extraterrestrische Physik and ISO Data Centre A. D. Storrs Towson University P. Tanga Istituto Nazionale di Astrofisica Osservatorio Astronomico di Torino and Observatoire de Nice Orbiting platforms provide the opportunity to observe asteroids without limitation by Earth’s atmosphere. Several Earth-orbiting observatories have been successfully operated in the last decade, obtaining unique results on asteroid physical properties. These include the high-resolu- tion mapping of the surface of 4 Vesta and the first spectra of asteroids in the far-infrared wave- length range. In the near future other space platforms and orbiting observatories are planned. Some of them are particularly promising for asteroid science and should considerably improve our knowledge of the dynamical and physical properties of asteroids. 1. INTRODUCTION 1800 asteroids. The results have been widely presented and discussed in the IRAS Minor Planet Survey (Tedesco et al., In the last few decades the use of space platforms has 1992) and the Supplemental IRAS Minor Planet Survey opened up new frontiers in the study of physical properties (Tedesco et al., 2002). This survey has been very important of asteroids by overcoming the limits imposed by Earth’s in the new assessment of the asteroid population: The aster- atmosphere and taking advantage of the use of new tech- oid taxonomy by Barucci et al. (1987), its recent extension nologies. (Fulchignoni et al., 2000), and an extended study of the size Earth-orbiting satellites have the advantage of observing distribution of main-belt asteroids (Cellino et al., 1991) are out of the terrestrial atmosphere; this allows them to be in just a few examples of the impact factor of this survey. -

Asteroid Family Identification 613
Bendjoya and Zappalà: Asteroid Family Identification 613 Asteroid Family Identification Ph. Bendjoya University of Nice V. Zappalà Astronomical Observatory of Torino Asteroid families have long been known to exist, although only recently has the availability of new reliable statistical techniques made it possible to identify a number of very “robust” groupings. These results have laid the foundation for modern physical studies of families, thought to be the direct result of energetic collisional events. A short summary of the current state of affairs in the field of family identification is given, including a list of the most reliable families currently known. Some likely future developments are also discussed. 1. INTRODUCTION calibrate new identification methods. According to the origi- nal papers published in the literature, Brouwer (1951) used The term “asteroid families” is historically linked to the a fairly subjective criterion to subdivide the Flora family name of the Japanese researcher Kiyotsugu Hirayama, who delineated by Hirayama. Arnold (1969) assumed that the was the first to use the concept of orbital proper elements to asteroids are dispersed in the proper-element space in a identify groupings of asteroids characterized by nearly iden- Poisson distribution. Lindblad and Southworth (1971) cali- tical orbits (Hirayama, 1918, 1928, 1933). In interpreting brated their method in such a way as to find good agree- these results, Hirayama made the hypothesis that such a ment with Brouwer’s results. Carusi and Massaro (1978) proximity could not be due to chance and proposed a com- adjusted their method in order to again find the classical mon origin for the members of these groupings. -

Elements of Astronomy
^ ELEMENTS ASTRONOMY: DESIGNED AS A TEXT-BOOK uabemws, Btminwcus, anb families. BY Rev. JOHN DAVIS, A.M. FORMERLY PROFESSOR OF MATHEMATICS AND ASTRONOMY IN ALLEGHENY CITY COLLEGE, AND LATE PRINCIPAL OF THE ACADEMY OF SCIENCE, ALLEGHENY CITY, PA. PHILADELPHIA: PRINTED BY SHERMAN & CO.^ S. W. COB. OF SEVENTH AND CHERRY STREETS. 1868. Entered, according to Act of Congress, in the year 1867, by JOHN DAVIS, in the Clerk's OlBce of the District Court of the United States for the Western District of Pennsylvania. STEREOTYPED BY MACKELLAR, SMITHS & JORDAN, PHILADELPHIA. CAXTON PRESS OF SHERMAN & CO., PHILADELPHIA- PREFACE. This work is designed to fill a vacuum in academies, seminaries, and families. With the advancement of science there should be a corresponding advancement in the facilities for acquiring a knowledge of it. To economize time and expense in this department is of as much importance to the student as frugality and in- dustry are to the success of the manufacturer or the mechanic. Impressed with the importance of these facts, and having a desire to aid in the general diffusion of useful knowledge by giving them some practical form, this work has been prepared. Its language is level to the comprehension of the youthful mind, and by an easy and familiar method it illustrates and explains all of the principal topics that are contained in the science of astronomy. It treats first of the sun and those heavenly bodies with which we are by observation most familiar, and advances consecutively in the investigation of other worlds and systems which the telescope has revealed to our view. -

Asteroid Observations with the Hubble Space Telescope? FGS??
A&A 401, 733–741 (2003) Astronomy DOI: 10.1051/0004-6361:20030032 & c ESO 2003 Astrophysics Asteroid observations with the Hubble Space Telescope? FGS?? II. Duplicity search and size measurements for 6 asteroids P. Tanga1;3, D. Hestroffer2;???, A. Cellino3,M.Lattanzi3, M. Di Martino3, and V. Zappal`a3 1 Laboratoire Cassini, Observatoire de la Cˆote d’Azur, BP 4229, 06304 Nice, France 2 IMCCE, UMR CNRS 8028, Paris Observatory, 77 Av. Denfert Rochereau 75014 Paris, France 3 INAF, Osservatorio Astronomico di Torino, Strada Osservatorio 20, 10025 Pino Torinese (TO), Italy Received 19 August 2002 / Accepted 9 December 2002 Abstract. We present the results of the observations of five Main Belt asteroids and one Trojan obtained using the Fine Guidance Sensors (FGS) of the Hubble Space Telescope. For each object, estimates of the spin axis orientation, angular size and overall shape, as well as possible indications of a binary structure, are derived. This enables the computation of new physical ephemerides. While the data concerning (63) Ausonia are clearly compatible with a three-axis ellipsoidal model, other objects show more complex shapes. (15) Eunomia, (43) Ariadne and (44) Nysa could in fact be double asteroids, or highly irregular bodies. The data concerning (624) Hektor are not conclusive as to its supposed binary nature, even if they agree with the signal of a single body. The results presented here strongly support the outstanding capabilities of the FGS for asteroid measurements, provided that the observations are performed over a sufficient time interval. Key words. minor planets, asteroids – methods: observational 1. Introduction their large maximum amplitudes, the light–curves of the se- lected targets are generally compatible with the behavior ex- The HST/FGS astrometer has already been successfully used pected for couples of bodies having overall rubble pile inter- in the past to derive angular diameters and flattenings of nal structures, for which equilibrium shapes can be expected Mira stars (Lattanzi et al. -

Research Paper in Nature
Draft version November 1, 2017 Typeset using LATEX twocolumn style in AASTeX61 DISCOVERY AND CHARACTERIZATION OF THE FIRST KNOWN INTERSTELLAR OBJECT Karen J. Meech,1 Robert Weryk,1 Marco Micheli,2, 3 Jan T. Kleyna,1 Olivier Hainaut,4 Robert Jedicke,1 Richard J. Wainscoat,1 Kenneth C. Chambers,1 Jacqueline V. Keane,1 Andreea Petric,1 Larry Denneau,1 Eugene Magnier,1 Mark E. Huber,1 Heather Flewelling,1 Chris Waters,1 Eva Schunova-Lilly,1 and Serge Chastel1 1Institute for Astronomy, 2680 Woodlawn Drive, Honolulu, HI 96822, USA 2ESA SSA-NEO Coordination Centre, Largo Galileo Galilei, 1, 00044 Frascati (RM), Italy 3INAF - Osservatorio Astronomico di Roma, Via Frascati, 33, 00040 Monte Porzio Catone (RM), Italy 4European Southern Observatory, Karl-Schwarzschild-Strasse 2, D-85748 Garching bei M¨unchen,Germany (Received November 1, 2017; Revised TBD, 2017; Accepted TBD, 2017) Submitted to Nature ABSTRACT Nature Letters have no abstracts. Keywords: asteroids: individual (A/2017 U1) | comets: interstellar Corresponding author: Karen J. Meech [email protected] 2 Meech et al. 1. SUMMARY 22 confirmed that this object is unique, with the highest 29 Until very recently, all ∼750 000 known aster- known hyperbolic eccentricity of 1:188 ± 0:016 . Data oids and comets originated in our own solar sys- obtained by our team and other researchers between Oc- tem. These small bodies are made of primor- tober 14{29 refined its orbital eccentricity to a level of dial material, and knowledge of their composi- precision that confirms the hyperbolic nature at ∼ 300σ. tion, size distribution, and orbital dynamics is Designated as A/2017 U1, this object is clearly from essential for understanding the origin and evo- outside our solar system (Figure2). -

Snake River Skies the Newsletter of the Magic Valley Astronomical Society
Snake River Skies The Newsletter of the Magic Valley Astronomical Society www.mvastro.org Membership Meeting MVAS President’s Message October 2018 Saturday, October 13th 2018 7:00pm at the Routines are something we all appreciate or dislike or simply fall into. They give us Herrett Center for Arts & Science College of Southern Idaho. the little milestones for our workday or mark our calendars with holidays and planned events. The one overriding routine we all enjoy is the change of the Public Star Party follows at the seasons and the night sky. I’m musing on this as I think of the observing habits we Centennial Observatory all have, in particular the preparations for a night outside. This time of year in Idaho we would make sure we have cooler weather gear and perhaps a thermos of warm Club Officers beverage before aligning our scopes and locating our first target for the night. Here in Florida the routine is quite a bit different. Tim Frazier, President [email protected] I can’t remember ever observing in shorts, sandals and a light, short-sleeved shirt. Nor making sure I am covered with insect repellent and have a rain jacket and tarp Robert Mayer, Vice President nearby, even though the sky is clear. Standing at a telescope, feeling sand [email protected] between my toes and hearing the surf crashing were also new observing experiences. Gary Leavitt, Secretary [email protected] However, the same thrill of seeing into our universe was there, as well as the 208-731-7476 phases of the moon and Venus, the moons of Jupiter and the ruddy face of Mars. -
The Minor Planet Bulletin
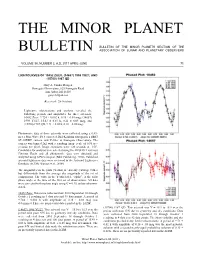
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 38, NUMBER 2, A.D. 2011 APRIL-JUNE 71. LIGHTCURVES OF 10452 ZUEV, (14657) 1998 YU27, AND (15700) 1987 QD Gary A. Vander Haagen Stonegate Observatory, 825 Stonegate Road Ann Arbor, MI 48103 [email protected] (Received: 28 October) Lightcurve observations and analysis revealed the following periods and amplitudes for three asteroids: 10452 Zuev, 9.724 ± 0.002 h, 0.38 ± 0.03 mag; (14657) 1998 YU27, 15.43 ± 0.03 h, 0.21 ± 0.05 mag; and (15700) 1987 QD, 9.71 ± 0.02 h, 0.16 ± 0.05 mag. Photometric data of three asteroids were collected using a 0.43- meter PlaneWave f/6.8 corrected Dall-Kirkham astrograph, a SBIG ST-10XME camera, and V-filter at Stonegate Observatory. The camera was binned 2x2 with a resulting image scale of 0.95 arc- seconds per pixel. Image exposures were 120 seconds at –15C. Candidates for analysis were selected using the MPO2011 Asteroid Viewing Guide and all photometric data were obtained and analyzed using MPO Canopus (Bdw Publishing, 2010). Published asteroid lightcurve data were reviewed in the Asteroid Lightcurve Database (LCDB; Warner et al., 2009). The magnitudes in the plots (Y-axis) are not sky (catalog) values but differentials from the average sky magnitude of the set of comparisons. The value in the Y-axis label, “alpha”, is the solar phase angle at the time of the first set of observations. All data were corrected to this phase angle using G = 0.15, unless otherwise stated. -

(2000) Forging Asteroid-Meteorite Relationships Through Reflectance
Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. B.S. Physics Rensselaer Polytechnic Institute, 1988 M.S. Geology and Planetary Science University of Pittsburgh, 1991 SUBMITTED TO THE DEPARTMENT OF EARTH, ATMOSPHERIC, AND PLANETARY SCIENCES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN PLANETARY SCIENCES AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY FEBRUARY 2000 © 2000 Massachusetts Institute of Technology. All rights reserved. Signature of Author: Department of Earth, Atmospheric, and Planetary Sciences December 30, 1999 Certified by: Richard P. Binzel Professor of Earth, Atmospheric, and Planetary Sciences Thesis Supervisor Accepted by: Ronald G. Prinn MASSACHUSES INSTMUTE Professor of Earth, Atmospheric, and Planetary Sciences Department Head JA N 0 1 2000 ARCHIVES LIBRARIES I 3 Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. Submitted to the Department of Earth, Atmospheric, and Planetary Sciences on December 30, 1999 in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Planetary Sciences ABSTRACT Near-infrared spectra (-0.90 to ~1.65 microns) were obtained for 196 main-belt and near-Earth asteroids to determine plausible meteorite parent bodies. These spectra, when coupled with previously obtained visible data, allow for a better determination of asteroid mineralogies. Over half of the observed objects have estimated diameters less than 20 k-m. Many important results were obtained concerning the compositional structure of the asteroid belt. A number of small objects near asteroid 4 Vesta were found to have near-infrared spectra similar to the eucrite and howardite meteorites, which are believed to be derived from Vesta. -

The Minor Planet Bulletin Is Open to Papers on All Aspects of 6500 Kodaira (F) 9 25.5 14.8 + 5 0 Minor Planet Study
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 32, NUMBER 3, A.D. 2005 JULY-SEPTEMBER 45. 120 LACHESIS – A VERY SLOW ROTATOR were light-time corrected. Aspect data are listed in Table I, which also shows the (small) percentage of the lightcurve observed each Colin Bembrick night, due to the long period. Period analysis was carried out Mt Tarana Observatory using the “AVE” software (Barbera, 2004). Initial results indicated PO Box 1537, Bathurst, NSW, Australia a period close to 1.95 days and many trial phase stacks further [email protected] refined this to 1.910 days. The composite light curve is shown in Figure 1, where the assumption has been made that the two Bill Allen maxima are of approximately equal brightness. The arbitrary zero Vintage Lane Observatory phase maximum is at JD 2453077.240. 83 Vintage Lane, RD3, Blenheim, New Zealand Due to the long period, even nine nights of observations over two (Received: 17 January Revised: 12 May) weeks (less than 8 rotations) have not enabled us to cover the full phase curve. The period of 45.84 hours is the best fit to the current Minor planet 120 Lachesis appears to belong to the data. Further refinement of the period will require (probably) a group of slow rotators, with a synodic period of 45.84 ± combined effort by multiple observers – preferably at several 0.07 hours. The amplitude of the lightcurve at this longitudes. Asteroids of this size commonly have rotation rates of opposition was just over 0.2 magnitudes. -

D a N B R U T
D A N B R U T O N Education Ph.D., Physics, Texas A&M University, College Station, 1996 M.S., Physics, Stephen F. Austin State University, Nacogdoches, 1990 B.S., Physics, Stephen F. Austin State University, Nacogdoches, 1988 Experience Full Professor, Stephen F. Austin State University, 9/08 to present Associate Professor, Stephen F. Austin State University, 9/01 to 9/08 Senior Software Developer, Anderson Software, 6/04 to present Assistant Professor, Stephen F. Austin State University, 9/96 to 9/01 Researcher, Texas A&M University, 5/90 to 9/96 Physics and Astronomy Instructor, Texas A&M University, 5/90 to 9/96 Observatory Supervisor, Texas A&M University, 5/92 to 9/96 Courses Taught EGR 111 Foundations in Engineering I EGR 112 Foundations in Engineering II EGR 215 Introduction to Electrical Engineering EGR 315 Engineering Design EGR 342 Digital Systems AST105 - Modern Astronomy AST305 - Observational Astronomy AST335 – Astrophysics PHY101 - Conceptual Physics PHY110 - Introduction to Electronics PHY108 - Introduction to Physics/Engineering PHY262 - Electrical Circuits and Devices PHY250 - Engineering Statics PHY343 - Digital Electronics PHY470 - Student Seminars PHY475 - Special Topics in Physics and Astronomy PHY476 - Special Topics in Electronics PHY570 - Student Seminars PHY575 - Special Topics in Physics and Astronomy PHY576 - Asteroid Hunting PHY589 - Thesis Research PHY590 - Thesis Writing Memberships American Association of Physics Teachers American Astronomical Society Leadership President of the Texas Section of the American Association of Physics Teachers and other officer positions (2002-2006) http://www.tsaapt.org Honors Teaching Excellence Award - Stephen F. Austin State University Department, College, and University Level, 2003 American Physical Society Presentation Award McDonald's Award for Excellence in Teaching PS Presentation Award Robert A. -

The Planetary and Lunar Ephemeris DE 421
IPN Progress Report 42-178 • August 15, 2009 The Planetary and Lunar Ephemeris DE 421 William M. Folkner,* James G. Williams,† and Dale H. Boggs† The planetary and lunar ephemeris DE 421 represents updated estimates of the orbits of the Moon and planets. The lunar orbit is known to submeter accuracy through fitting lunar laser ranging data. The orbits of Venus, Earth, and Mars are known to subkilometer accu- racy. Because of perturbations of the orbit of Mars by asteroids, frequent updates are needed to maintain the current accuracy into the future decade. Mercury’s orbit is determined to an accuracy of several kilometers by radar ranging. The orbits of Jupiter and Saturn are determined to accuracies of tens of kilometers as a result of spacecraft tracking and modern ground-based astrometry. The orbits of Uranus, Neptune, and Pluto are not as well deter- mined. Reprocessing of historical observations is expected to lead to improvements in their orbits in the next several years. I. Introduction The planetary and lunar ephemeris DE 421 is a significant advance over earlier ephemeri- des. Compared with DE 418, released in July 2007,1 the DE 421 ephemeris includes addi- tional data, especially range and very long baseline interferometry (VLBI) measurements of Mars spacecraft; range measurements to the European Space Agency’s Venus Express space- craft; and use of current best estimates of planetary masses in the integration process. The lunar orbit is more robust due to an expanded set of lunar geophysical solution parameters, seven additional months of laser ranging data, and complete convergence. -

The British Astronomical Association Handbook 2014
THE HANDBOOK OF THE BRITISH ASTRONOMICAL ASSOCIATION 2015 2014 October ISSN 0068–130–X CONTENTS CALENDAR 2015 . 2 PREFACE . 3 HIGHLIGHTS FOR 2015 . 4 SKY DIARY . .. 5 VISIBILITY OF PLANETS . 6 RISING AND SETTING OF THE PLANETS IN LATITUDES 52°N AND 35°S . 7-8 ECLIPSES . 9-14 TIME . 15-16 EARTH AND SUN . 17-19 LUNAR LIBRATION . 20 MOON . 21 MOONRISE AND MOONSET . 21-25 SUN’S SELENOGRAPHIC COLONGITUDE . 26 LUNAR OCCULTATIONS . 27-33 GRAZING LUNAR OCCULTATIONS . 34-35 APPEARANCE OF PLANETS . 36 MERCURY . 37-38 VENUS . 39 MARS . 40-41 ASTEROIDS . 42 ASTEROID EPHEMERIDES . 43-47 ASTEROID OCCULTATIONS .. 48-50 NEO CLOSE APPROACHES TO EARTH . 51 ASTEROIDS: FAVOURABLE OBSERVING OPPORTUNITIES . 52-54 JUPITER . 55-59 SATELLITES OF JUPITER . 59-63 JUPITER ECLIPSES, OCCULTATIONS AND TRANSITS . 64-73 SATURN . 74-77 SATELLITES OF SATURN . 78-81 URANUS . 82 NEPTUNE . 83 TRANS–NEPTUNIAN & SCATTERED DISK OBJECTS . 84 DWARF PLANETS . 85-88 COMETS . 89-96 METEOR DIARY . 97-99 VARIABLE STARS (RZ Cassiopeiae; Algol; λ Tauri) . 100-101 MIRA STARS . 102 VARIABLE STAR OF THE YEAR (V Bootis) . 103-105 EPHEMERIDES OF DOUBLE STARS . 106-107 BRIGHT STARS . 108 ACTIVE GALAXIES . 109 PLANETS – EXPLANATION OF TABLES . 110 ELEMENTS OF PLANETARY ORBITS . 111 ASTRONOMICAL AND PHYSICAL CONSTANTS . 111-112 INTERNET RESOURCES . 113-114 GREEK ALPHABET . 115 ACKNOWLEDGEMENTS . 116 ERRATA . 116 Front Cover: The Moon at perigee and apogee – highlighting the clear size difference when the Moon is closest and farthest away from the Earth. Perigee on 2009/11/08 at 23:24UT, distance