Using Computational Fluid Dynamics for Aerodynamics Antony Jameson and Massimiliano Fatica Stanford University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Experimental Analysis of a Low Cost Lift and Drag Force Measurement System for Educational Sessions
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 04 Issue: 09 | Sep -2017 www.irjet.net p-ISSN: 2395-0072 Experimental Analysis of a Low Cost Lift and Drag Force Measurement System for Educational Sessions Asutosh Boro B.Tech National Institute of Technology Srinagar Indian Institute of Science, Bangalore 560012 ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - A low cost Lift and Drag force measurement wind- tunnel and used for educational learning with good system was designed, fabricated and tested in wind tunnel accuracy. In addition, an indirect wind tunnel velocity to be used for basic practical lab sessions. It consists of a measurement capability of the designed system was mechanical linkage system, piezo-resistive sensors and tested. NACA airfoil 4209 was chosen as the test subject to NACA Airfoil to test its performance. The system was tested measure its performance and tests were done at various at various velocities and angle of attacks and experimental angles of attack and velocities 11m/s, 12m/s and 14m/s. coefficient of lift and drag were then compared with The force and coefficient results obtained were compared literature values to find the errors. A decent accuracy was with literature data from airfoil tools[1] to find the deduced from the lift data and the considerable error in system’s accuracy. drag was due to concentration of drag forces across a narrow force range and sensor’s fluctuations across that 1.1 Methodology range. It was inferred that drag system will be as accurate as the lift system when the drag forces are large. -

Numerical Optimization and Wind-Tunnel Testing of Low
Numerical Optimization and WindTunnel Testing of Low ReynoldsNumber Airfoils y Th Lutz W Wurz and S Wagner University of Stuttgart D Stuttgart Germany Abstract A numerical optimization to ol has been applied to the design of low Reynolds number airfoils Re The aero dynamic mo del is based on the Eppler co de with ma jor extensions A new robust mo del for the calculation of short n transitional separation bubbles was implemented along with an e transition criterion and Drelas turbulent b oundarylayer pro cedure with a mo died shap efactor relation The metho d was coupled with a commercial hybrid optimizer and applied to p erform unconstrained high degree of freedom optimizations with ob jective to minimize the drag for a sp ecied lift range One resulting airfoil was tested in the Mo del WindTunnel MWT of the institute and compared to the classical RG airfoil In order to allow a realistic recalculation of exp eriments conducted in the MWT the limiting nfactor was evaluated for this facility A sp ecial airfoil featuring an extensive instability zone was designed for this purp ose The investigation was supplemented by detailed measurements of the turbulence level Toget more insight in design guidelines for very low Reynolds numb er airfoils the inuence of variations of the leadingedge geometry on the aero dynamic characteristics was studied exp erimentally at Re Intro duction For the Reynoldsnumber regime of aircraft wingsections Re sophisticated di rect and inverse metho ds for airfoil analysis and design are available -
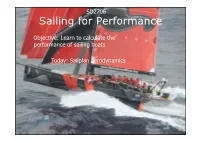
Sailing for Performance
SD2706 Sailing for Performance Objective: Learn to calculate the performance of sailing boats Today: Sailplan aerodynamics Recap User input: Rig dimensions ‣ P,E,J,I,LPG,BAD Hull offset file Lines Processing Program, LPP: ‣ Example.bri LPP_for_VPP.m rigdata Hydrostatic calculations Loading condition ‣ GZdata,V,LOA,BMAX,KG,LCB, hulldata ‣ WK,LCG LCF,AWP,BWL,TC,CM,D,CP,LW, T,LCBfpp,LCFfpp Keel geometry ‣ TK,C Solve equilibrium State variables: Environmental variables: solve_Netwon.m iterative ‣ VS,HEEL ‣ TWS,TWA ‣ 2-dim Netwon-Raphson iterative method Hydrodynamics Aerodynamics calc_hydro.m calc_aero.m VS,HEEL dF,dM Canoe body viscous drag Lift ‣ RFC ‣ CL Residuals Viscous drag Residuary drag calc_residuals_Newton.m ‣ RR + dRRH ‣ CD ‣ dF = FAX + FHX (FORCE) Keel fin drag ‣ dM = MH + MR (MOMENT) Induced drag ‣ RF ‣ CDi Centre of effort Centre of effort ‣ CEH ‣ CEA FH,CEH FA,CEA The rig As we see it Sail plan ≈ Mainsail + Jib (or genoa) + Spinnaker The sail plan is defined by: IMSYC-66 P Mainsail hoist [m] P E Boom leech length [m] BAD Boom above deck [m] I I Height of fore triangle [m] J Base of fore triangle [m] LPG Perpendicular of jib [m] CEA CEA Centre of effort [m] R Reef factor [-] J E LPG BAD D Sailplan modelling What is the purpose of the sails on our yacht? To maximize boat speed on a given course in a given wind strength ‣ Max driving force, within our available righting moment Since: We seek: Fx (Thrust vs Resistance) ‣ Driving force, FAx Fy (Side forces, Sails vs. Keel) ‣ Heeling force, FAy (Mx (Heeling-righting moment)) ‣ Heeling arm, CAE Aerodynamics of sails A sail is: ‣ a foil with very small thickness and large camber, ‣ with flexible geometry, ‣ usually operating together with another sail ‣ and operating at a large variety of angles of attack ‣ Environment L D V Each vertical section is a differently cambered thin foil Aerodynamics of sails TWIST due to e.g. -

How Do Wings Generate Lift? 2
GENERAL ARTICLE How Do Wings Generate Lift? 2. Myths, Approximate Theories and Why They All Work M D Deshpande and M Sivapragasam A cambered surface that is moving forward in a fluid gen- erates lift. To explain this interesting fact in terms of sim- pler models, some preparatory concepts were discussed in the first part of this article. We also agreed on what is an accept- able explanation. Then some popular models were discussed. Some quantitative theories will be discussed in this conclud- ing part. Finally we will tie up all these ideas together and connect them to the rigorous momentum theorem. M D Deshpande is a Professor in the Faculty of Engineering The triumphant vindication of bold theories – are these not the and Technology at M S Ramaiah University of pride and justification of our life’s work? Applied Sciences. Sherlock Holmes, The Valley of Fear Sir Arthur Conan Doyle 1. Introduction M Sivapragasam is an We start here with two quantitative theories before going to the Assistant Professor in the momentum conservation principle in the next section. Faculty of Engineering and Technology at M S Ramaiah University of Applied 1.1 The Thin Airfoil Theory Sciences. This elegant approximate theory takes us further than what was discussed in the last two sections of Part 111, and quantifies the Resonance, Vol.22, No.1, ideas to get expressions for lift and moment that are remarkably pp.61–77, 2017. accurate. The pressure distribution on the airfoil, apart from cre- ating a lift force, leads to a nose-up or nose-down moment also. -

Future Directions of Computational Fluid Dynamics
Future Directions of Computational Fluid Dynamics F. D. Witherden∗ and A. Jameson† Stanford University, Stanford, CA, 94305 For the past fifteen years computational fluid dynamics (CFD) has been on a plateau. Due to the inability of current-generation approaches to accurately predict the dynamics of turbulent separated flows, reliable use of CFD has been restricted to a small regionof the operating design space. In this paper we make the case for large eddy simulations as a means of expanding the envelope of CFD. As part of this we outline several key challenges which must be overcome in order to enable its adoption within industry. Specific issues that we will address include the impact of heterogeneous massively parallel computing hardware, the need for new and novel numerical algorithms, and the increasingly complex nature of methods and their respective implementations. I. Introduction Computational fluid dynamics (CFD) is a relatively young discipline, having emerged during the last50 years. During this period advances in CFD have been paced by advances in the available computational hardware, which have enabled its application to progressively more complex engineering and scientific prob- lems. At this point CFD has revolutionized the design process in the aerospace industry, and its use is pervasive in many other fields of engineering ranging from automobiles to ships to wind energy. Itisalso a key tool for scientific investigation of the physics of fluid motion, and in other branches of sciencesuch as astrophysics. Additionally, throughout its history CFD has been an important incubator for the formu- lation and development of numerical algorithms which have been seminal to advances in other branches of computational physics. -

A Concept of the Vortex Lift of Sharp-Edge Delta Wings Based on a Leading-Edge-Suction Analogy Tech Library Kafb, Nm
I A CONCEPT OF THE VORTEX LIFT OF SHARP-EDGE DELTA WINGS BASED ON A LEADING-EDGE-SUCTION ANALOGY TECH LIBRARY KAFB, NM OL3042b NASA TN D-3767 A CONCEPT OF THE VORTEX LIFT OF SHARP-EDGE DELTA WINGS BASED ON A LEADING-EDGE-SUCTION ANALOGY By Edward C. Polhamus Langley Research Center Langley Station, Hampton, Va. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - Price $1.00 A CONCEPT OF THE VORTEX LIFT OF SHARP-EDGE DELTA WINGS BASED ON A LEADING-EDGE-SUCTION ANALOGY By Edward C. Polhamus Langley Research Center SUMMARY A concept for the calculation of the vortex lift of sharp-edge delta wings is pre sented and compared with experimental data. The concept is based on an analogy between the vortex lift and the leading-edge suction associated with the potential flow about the leading edge. This concept, when combined with potential-flow theory modified to include the nonlinearities associated with the exact boundary condition and the loss of the lift component of the leading-edge suction, provides excellent prediction of the total lift for a wide range of delta wings up to angles of attack of 20° or greater. INTRODUCTION The aerodynamic characteristics of thin sharp-edge delta wings are of interest for supersonic aircraft and have been the subject of theoretical and experimental studies for many years in both the subsonic and supersonic speed ranges. Of particular interest at subsonic speeds has been the formation and influence of the leading-edge separation vor tex that occurs on wings having sharp, highly swept leading edges. -

Potential Flow Theory
2.016 Hydrodynamics Reading #4 2.016 Hydrodynamics Prof. A.H. Techet Potential Flow Theory “When a flow is both frictionless and irrotational, pleasant things happen.” –F.M. White, Fluid Mechanics 4th ed. We can treat external flows around bodies as invicid (i.e. frictionless) and irrotational (i.e. the fluid particles are not rotating). This is because the viscous effects are limited to a thin layer next to the body called the boundary layer. In graduate classes like 2.25, you’ll learn how to solve for the invicid flow and then correct this within the boundary layer by considering viscosity. For now, let’s just learn how to solve for the invicid flow. We can define a potential function,!(x, z,t) , as a continuous function that satisfies the basic laws of fluid mechanics: conservation of mass and momentum, assuming incompressible, inviscid and irrotational flow. There is a vector identity (prove it for yourself!) that states for any scalar, ", " # "$ = 0 By definition, for irrotational flow, r ! " #V = 0 Therefore ! r V = "# ! where ! = !(x, y, z,t) is the velocity potential function. Such that the components of velocity in Cartesian coordinates, as functions of space and time, are ! "! "! "! u = , v = and w = (4.1) dx dy dz version 1.0 updated 9/22/2005 -1- ©2005 A. Techet 2.016 Hydrodynamics Reading #4 Laplace Equation The velocity must still satisfy the conservation of mass equation. We can substitute in the relationship between potential and velocity and arrive at the Laplace Equation, which we will revisit in our discussion on linear waves. -

Comparison of Wind Tunnel Airfoil Performance Data with Wind Turbine Blade Data
SERI/TP-254·3799 UC Category: 261 DE90000343 Comparison of Wind Tunnel Airfoil Performance Data with Wind Turbine Blade Data C. P. Butterfield G. N. Scott W. Musial July 1990 presented at the 25th lntersociety Energy Conversion Engineering Conference (sponsored by American Institute of Aeronautics and Astronautics) Reno, Nevada 12-17 August 1990 Prepared under Task No. WE011 001 Solar Energy Research Institute A Division of Midwest Research Institute 1617 Cole Boulevard Golden, Colorado 80401-3393 Prepared for the U.S. Department of Energy Contract No. DE-AC02-83CH1 0093 NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, com pleteness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily con stitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. Printed in the United States of America Available from: National Technical Information Service U.S. Department of Commerce 5285 Port Royal Road Springfield, VA 22161 Price: Microfiche A01 Printed Copy A02 Codes are used for pricing all publications. -

Computational Fluid Dynamic Analysis of Scaled Hypersonic Re-Entry Vehicles
Computational Fluid Dynamic Analysis of Scaled Hypersonic Re-Entry Vehicles A project presented to The Faculty of the Department of Aerospace Engineering San Jose State University In partial fulfillment of the requirements for the degree Master of Science in Aerospace Engineering by Simon H.B. Sorensen March 2019 approved by Dr. Periklis Papadopoulous Faculty Advisor 1 i ABSTRACT With the advancement of technology in space, reusable re-entry space planes have become a focus point with their ability to save materials and utilize existing flight data. Their ability to not only supply materials to space stations or deploy satellites, but also in atmosphere flight makes them versatile in their deployment and recovery. The existing design of vehicles such as the Space Shuttle Orbiter and X-37 Orbital Test Vehicle can be used to observe the effects of scaling existing vehicle geometry and how it would operate in identical conditions to the full-size vehicle. These scaled vehicles, if viable, would provide additional options depending on mission parameters without losing the advantages of reusable re-entry space planes. 2 Table of Contents Abstract . i Nomenclature . .1 1. Introduction. .1 2. Literature Review. 2 2.1 Space Shuttle Orbiter. 2 2.2 X-37 Orbital Test Vehicle. 3 3. Assumptions & Equations. 3 3.1 Assumptions. 3 3.2 Equations to Solve. 4 4. Methodology. 5 5. Base Sized Vehicles. 5 5.1 Space Shuttle Orbiter. 5 5.2 X-37. 9 6. Scaled Vehicles. 11 7. Simulations. 12 7.1 Initial Conditions. 12 7.2 Initial Test Utilizing X-37. .13 7.3 X-37 OTV. -

Aerodyn Theory Manual
January 2005 • NREL/TP-500-36881 AeroDyn Theory Manual P.J. Moriarty National Renewable Energy Laboratory Golden, Colorado A.C. Hansen Windward Engineering Salt Lake City, Utah National Renewable Energy Laboratory 1617 Cole Boulevard, Golden, Colorado 80401-3393 303-275-3000 • www.nrel.gov Operated for the U.S. Department of Energy Office of Energy Efficiency and Renewable Energy by Midwest Research Institute • Battelle Contract No. DE-AC36-99-GO10337 January 2005 • NREL/TP-500-36881 AeroDyn Theory Manual P.J. Moriarty National Renewable Energy Laboratory Golden, Colorado A.C. Hansen Windward Engineering Salt Lake City, Utah Prepared under Task No. WER4.3101 and WER5.3101 National Renewable Energy Laboratory 1617 Cole Boulevard, Golden, Colorado 80401-3393 303-275-3000 • www.nrel.gov Operated for the U.S. Department of Energy Office of Energy Efficiency and Renewable Energy by Midwest Research Institute • Battelle Contract No. DE-AC36-99-GO10337 NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. -

Upwind Sail Aerodynamics : a RANS Numerical Investigation Validated with Wind Tunnel Pressure Measurements I.M Viola, Patrick Bot, M
Upwind sail aerodynamics : A RANS numerical investigation validated with wind tunnel pressure measurements I.M Viola, Patrick Bot, M. Riotte To cite this version: I.M Viola, Patrick Bot, M. Riotte. Upwind sail aerodynamics : A RANS numerical investigation validated with wind tunnel pressure measurements. International Journal of Heat and Fluid Flow, Elsevier, 2012, 39, pp.90-101. 10.1016/j.ijheatfluidflow.2012.10.004. hal-01071323 HAL Id: hal-01071323 https://hal.archives-ouvertes.fr/hal-01071323 Submitted on 8 Oct 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. I.M. Viola, P. Bot, M. Riotte Upwind Sail Aerodynamics: a RANS numerical investigation validated with wind tunnel pressure measurements International Journal of Heat and Fluid Flow 39 (2013) 90–101 http://dx.doi.org/10.1016/j.ijheatfluidflow.2012.10.004 Keywords: sail aerodynamics, CFD, RANS, yacht, laminar separation bubble, viscous drag. Abstract The aerodynamics of a sailing yacht with different sail trims are presented, derived from simulations performed using Computational Fluid Dynamics. A Reynolds-averaged Navier- Stokes approach was used to model sixteen sail trims first tested in a wind tunnel, where the pressure distributions on the sails were measured. -
6.2 Understanding Flight
6.2 - Understanding Flight Grade 6 Activity Plan Reviews and Updates 6.2 Understanding Flight Objectives: 1. To understand Bernoulli’s Principle 2. To explain drag and how different shapes influence it 3. To describe how the results of similar and repeated investigations testing drag may vary and suggest possible explanations for variations. 4. To demonstrate methods for altering drag in flying devices. Keywords/concepts: Bernoulli’s Principle, pressure, lift, drag, angle of attack, average, resistance, aerodynamics Curriculum outcomes: 107-9, 204-7, 205-5, 206-6, 301-17, 301-18, 303-32, 303-33. Take-home product: Paper airplane, hoop glider Segment Details African Proverb and Cultural “The bird flies, but always returns to Earth.” Gambia Relevance (5min.) Have any of you ever been on an airplane? Have you ever wondered how such a heavy aircraft can fly? Introduce Bernoulli’s Principle and drag. Pre-test Show this video on Bernoulli’s Principle: (10 min.) https://www.youtube.com/watch?v=bv3m57u6ViE Note: To gain the speed so lift can be created the plane has to overcome the force of drag; they also have to overcome this force constantly in flight. Therefore, planes have been designed to reduce drag Demo 1 Use the students to demonstrate the basic properties of (10 min.) Bernoulli’s Principle. Activity 2 Students use paper airplanes to alter drag and hypothesize why (30 min.) different planes performed differently Activity 3 Students make a hoop glider to understand the effects of drag (20 min.) on different shaped objects. Post-test Word scramble. (5 min.) https://www.amazon.com/PowerUp-Smartphone-Controlled- Additional idea Paper-Airplane/dp/B00N8GWZ4M Suggested Interpretation of Proverb What comes up must come down Background Information Bernoulli’s Principle Daniel Bernoulli, an eighteenth-century Swiss scientist, discovered that as the velocity of a fluid increases, its pressure decreases.