Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Synchronization of Chaotic Systems
Synchronization of chaotic systems Cite as: Chaos 25, 097611 (2015); https://doi.org/10.1063/1.4917383 Submitted: 08 January 2015 . Accepted: 18 March 2015 . Published Online: 16 April 2015 Louis M. Pecora, and Thomas L. Carroll ARTICLES YOU MAY BE INTERESTED IN Nonlinear time-series analysis revisited Chaos: An Interdisciplinary Journal of Nonlinear Science 25, 097610 (2015); https:// doi.org/10.1063/1.4917289 Using machine learning to replicate chaotic attractors and calculate Lyapunov exponents from data Chaos: An Interdisciplinary Journal of Nonlinear Science 27, 121102 (2017); https:// doi.org/10.1063/1.5010300 Attractor reconstruction by machine learning Chaos: An Interdisciplinary Journal of Nonlinear Science 28, 061104 (2018); https:// doi.org/10.1063/1.5039508 Chaos 25, 097611 (2015); https://doi.org/10.1063/1.4917383 25, 097611 © 2015 Author(s). CHAOS 25, 097611 (2015) Synchronization of chaotic systems Louis M. Pecora and Thomas L. Carroll U.S. Naval Research Laboratory, Washington, District of Columbia 20375, USA (Received 8 January 2015; accepted 18 March 2015; published online 16 April 2015) We review some of the history and early work in the area of synchronization in chaotic systems. We start with our own discovery of the phenomenon, but go on to establish the historical timeline of this topic back to the earliest known paper. The topic of synchronization of chaotic systems has always been intriguing, since chaotic systems are known to resist synchronization because of their positive Lyapunov exponents. The convergence of the two systems to identical trajectories is a surprise. We show how people originally thought about this process and how the concept of synchronization changed over the years to a more geometric view using synchronization manifolds. -

U.S. National Aerobatic Championships
November 2012 2012 U.S. National Aerobatic Championships OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB Vol. 41 No. 11 November 2012 A PUBLICATION OF THE INTERNATIONAL AEROBATIC CLUB CONTENTSOFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB At the 2012 U.S. National Aerobatic Championships, 95 competitors descended upon the North Texas Regional Airport in hopes of pursuing the title of national champion and for some, the distinguished honor of qualifying for the U.S. Unlimited Aerobatic Team. –Aaron McCartan FEATURES 4 2012 U.S. National Aerobatic Championships by Aaron McCartan 26 The Best of the Best by Norm DeWitt COLUMNS 03 / President’s Page DEPARTMENTS 02 / Letter From the Editor 28 / Tech Tips THE COVER 29 / News/Contest Calendar This photo was taken at the 30 / Tech Tips 2012 U.S. National Aerobatic Championships competition as 31 / FlyMart & Classifieds a pilot readies to dance in the sky. Photo by Laurie Zaleski. OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB REGGIE PAULK COMMENTARY / EDITOR’S LOG OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB PUBLISHER: Doug Sowder IAC MANAGER: Trish Deimer-Steineke EDITOR: Reggie Paulk OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB VICE PRESIDENT OF PUBLICATIONS: J. Mac McClellan Leading by example SENIOR ART DIRECTOR: Olivia P. Trabbold A source for inspiration CONTRIBUTING AUTHORS: Jim Batterman Aaron McCartan Sam Burgess Reggie Paulk Norm DeWittOFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB WHILE AT NATIONALS THIS YEAR, the last thing on his mind would IAC CORRESPONDENCE I was privileged to visit with pilots at be helping a competitor in a lower International Aerobatic Club, P.O. -

Ff 89/6 Copy
$3 vol libre • free flight 6/89 Dec - Jan POTPOURRI SAC was informed by Sport Canada on the 10th of July that we are not eligible for funding for 1989-90 and until further notice. Thus we are now totally on our own. The average yearly grant from 1979 to 1988 in 1989 dollars was $14,000, or $16 per person. Perhaps it’s a good thing as planning in an atmosphere of doubt is not conducive to good health and efficient use of funds. The cutback was not unexpected and steps were taken early on to ease the effects of this loss of revenue. Imaginative planning in our small store and a good response from our members through the use of the “Soaring Stuff” inserts resulted in in- creased sales. We will also receive higher than projected invest- ment income essentially due to careful cash management and short-term interest rates, which have remained higher for longer than generally expected. In addition, a small gain in projected receipts from an unexpected increase in membership – now at 1423 – which is the first time since 1982 that we have passed 1400. Total expenditures should come in well below budget projection, primarily as a result of scaling back meetings and travel expenditures. On balance it seems fair to say that a combination of some tight fistedness on the expenditure side and a bit of luck on the revenue side will leave SAC in a financially stronger position than was expected at the beginning of the season, despite the cutting off of govern- ment funding. -

Ii' C Aeronautical Engineering Aeron ^Al Engineering Aeronautical Er Lautical Engineering Aeronautic Aeronautical Engineering Ae
ft • f^^m Jt Aeronautical NASA SP-7037(145) \\ I/%%i/\ Engineering February 1982 eg ^VV ^^•Pv % A Continuin9 Bibliography with Indexes National Aeronautics and Space Administration i' c Aeronautica• ^ l Engineerin•• ^^ • ^"— *g ^^ Aero* n (NASA-SP-7037 (1U5) ) AERONAUTICAL N82-21138 •^I ENGINEERING. A CONTINUING BIBLIOGRAPHY WITH _ ^NDEXFS (National Aeronautics and Space \ p^^^il Administration) 100 p HC $5.00 CSCL 01A ^al Engineering Aeronautical Er lautical Engineering Aeronautic Aeronautical Engineering Aeror sring Aeronautical Engineering ngineering Aeronautical Engine :al Engineering Aeronautical Er lautical Engineering Aeronauts Aeronautical Engineering Aeror 3ring Aeronautical Engineering NASASP-7037(145) AERONAUTICAL ENGINEERING A CONTINUING BIBLIOGRAPHY WITH INDEXES (Supplement 145) A selection of annotated references to unclassified reports and journal articles that were introduced into the NASA scientific and technical information sys- tem and announced in January 1982 in • Scientific and Technical Aerospace-Reports (STAR) • International Aerospace Abstracts (IAA). Scientific and Technical Information Branch 1982 National Aeronautics and Space Administration Washington, DC This supplement is available as NTISUB/141/093 from .the National Technical Information Service (NTIS), Springfield, Virginia 22161 at the price of $5.00 domestic; $10.00 foreign. INTRODUCTION Under the terms of an interagency agreement with the Federal Aviation Administration this publication has been prepared by the National Aeronautics and Space Administration for the joint use of both agencies and the scientific and technical community concerned with the field of aeronautical engineering. The first issue of this bibliography was published in September 1970 and the first supplement in January 1971. This supplement to Aeronautical Engineering -- A Continuing Bibliography (NASA SP- 7037) lists 326 reports, journal articles, and other documents originally announced in January 1982 in Scientific and Technical Aerospace Reports (STAR) or in International Aerospace Abstracts (IAA). -

Soaring Magazine Index for 1990 to 1999/1990To1999 Organized by Subject
Soaring Magazine Index for 1990 to 1999/1990to1999 organized by subject The contents have all been re-entered by hand, so thereare going to be typos and confusion between author and subject, etc... Please send along any corrections and suggestions for improvement. 1-26 Bob Dittert, 1-26s + Rain = Championship,December,1999, page 24 1-26 Association Bob Hurni, 1991 1-26 Championships (Caesar Creek),January,1992, pages 18-24 George Powell, The Stealth Glider,January,1992, pages 28-30 MikeGrogan, Hallelujah! I Am Flying Again,January,1992, pages 35-39 Harry Senn, Why 1-26’sDon’tFly Sports Class,February,1992, pages 39-41 Luan & John Walker, 1992 1-26 Championships (Midlothian, TX),January,1993, pages 40-44 Joe Walter, What a Contest (the 1-26 Championships),October,1993, page 3 Jim Hard, (1993) 1-26 Championships at Albert Lea, Minnesota,November,1993, pages 19-25 TomHolloran, GPS: The First Year-Almost,November,1993, pages 26, 28-30 1000 Kilometer Flights Robert Penn, Sixteen Contestants Fly 1000 KilometersinPossible World RecordContest Task,No- vember,1990, page 15 YanWhytlaw, The 1000 KM Club,March, 1992, pages 20-23 KenKochanski, The Joy of Soaring (1000KM from Blairstown by Bob Templin and Ken Kochanski)!, September,1992, page 6 Sterling V.Starr, 1000KM in the Sky! (Over the Sierraand White Mountains),March, 1993, pages 42-45 Advertising Mark Kennedy, Soaring in Action: Please Note! (No) July Classified Ads,June, 1997, page 14 Convenience and Savings (with Soaring Classifieds),October,1997, page 4 Aerobatics Wade Nelson, An Aerobatic Ride at Estrella,January,1990, page 3 Trish Durbin, Cat Among the Pigeons,February,1990, page 20 Bob Kupps, The ThirdWorld Glider Aerobatic Championships (Hockenheim),March, 1990, page 15 Trish Durbin, Author’sResponse (to "Cat Among the Pigeons" Complaints),July,1990, page 2 Thomas J. -
Section 6 Part 2 - Glider Aircraft Version 2020
FAI Sporting Code Fédération Aéronautique Internationale Section 6 Regulations for the Conduct of International Aerobatic Events Part 2 Glider Aircraft Maison du Sport International Av. de Rhodanie 54 Version 2020 CH-1007 Lausanne (Switzerland) Tél. +41 (0)21 345 1070 Effective 1st January 2020 Fax +41 (0)21 345 1077 E-Mail: [email protected] Web: www.fai.org Sporting Code, Section 6 Part 2 - Glider Aircraft Version 2020 FEDERATION AERONAUTIQUE INTERNATIONALE MSI - Avenue de Rhodanie 54 – CH-1007 Lausanne – Switzerland Copyright 2020 All rights reserved. Copyright in this document is owned by the Fédération Aéronautique Internationale (FAI). Any person acting on behalf of the FAI or one of its Members is hereby authorised to copy, print, and distribute this document, subject to the following conditions: 1. The document may be used for information only and may not be exploited for commercial purposes. 2. Any copy of this document or portion thereof must include this copyright notice. 3. Regulations applicable to air law, air traffic and control in the respective countries are reserved in any event. They must be observed and, where applicable, take precedence over any sport regulations Note that any product, process or technology described in the document may be the subject of other Intellectual Property rights reserved by the Fédération Aéronautique Internationale or other entities and is not licensed hereunder. ii Sporting Code, Section 6 Part 2 - Glider Aircraft Version 2020 RIGHTS TO FAI INTERNATIONAL SPORTING EVENTS All international sporting events organised wholly or partly under the rules of the Fédération Aéronautique Internationale (FAI) Sporting Code1 are termed FAI International Sporting Events2. -

CAA Doc 743 Civil Air Displays a Guide for Pilots
Safety Regulation Group Civil Air Displays a guide for pilots contents introduction Introduction Air displays are now one of the most popular The law spectator events in the United Kingdom. On average there are over 250 civil flying displays Guidance for display each year attracting in excess of two million pilots spectators. It is of the utmost importance in the interests of public and personal safety, that those Managing the risk who participate in such displays operate to the highest standards. These notes are intended to Planning your provide advice to display pilots to help them display avoid the pitfalls which have been experienced in the past. Practising for your display The air show Display day Post display © Andrew Critchell 1 the law The rules governing the conduct of civil air displays in the United Kingdom are given in the current Air Navigation Order, The Rules of the Air Regulations and comprehensively explained in CAP 403 – “Flying Displays and Special Events: A Guide to Safety and Administrative Arrangements”. guidance for display pilots Display flying, especially aerobatics, is a specialised form of flying that frequently involves flying the aircraft close to the edges of the permitted flight envelope. Regrettably, most years, a small number of pilots are killed whilst displaying. Many of these pilots were highly experienced and extremely competent in their particular aircraft and display. What can be done to minimise the risk? managing the risk personnel fitness There are a large number of factors which affect the outcome of a particular flight. Many of them are encountered well before the pilot gets anywhere near the aircraft. -

Role of Nonlinear Dynamics and Chaos in Applied Sciences
v.;.;.:.:.:.;.;.^ ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Oivisipn 2000 Please be aware that all of the Missing Pages in this document were originally blank pages BARC/2OOO/E/OO3 GOVERNMENT OF INDIA ATOMIC ENERGY COMMISSION ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Division BHABHA ATOMIC RESEARCH CENTRE MUMBAI, INDIA 2000 BARC/2000/E/003 BIBLIOGRAPHIC DESCRIPTION SHEET FOR TECHNICAL REPORT (as per IS : 9400 - 1980) 01 Security classification: Unclassified • 02 Distribution: External 03 Report status: New 04 Series: BARC External • 05 Report type: Technical Report 06 Report No. : BARC/2000/E/003 07 Part No. or Volume No. : 08 Contract No.: 10 Title and subtitle: Role of nonlinear dynamics and chaos in applied sciences 11 Collation: 111 p., figs., ills. 13 Project No. : 20 Personal authors): Quissan V. Lawande; Nirupam Maiti 21 Affiliation ofauthor(s): Theoretical Physics Division, Bhabha Atomic Research Centre, Mumbai 22 Corporate authoifs): Bhabha Atomic Research Centre, Mumbai - 400 085 23 Originating unit : Theoretical Physics Division, BARC, Mumbai 24 Sponsors) Name: Department of Atomic Energy Type: Government Contd...(ii) -l- 30 Date of submission: January 2000 31 Publication/Issue date: February 2000 40 Publisher/Distributor: Head, Library and Information Services Division, Bhabha Atomic Research Centre, Mumbai 42 Form of distribution: Hard copy 50 Language of text: English 51 Language of summary: English 52 No. of references: 40 refs. 53 Gives data on: Abstract: Nonlinear dynamics manifests itself in a number of phenomena in both laboratory and day to day dealings. -
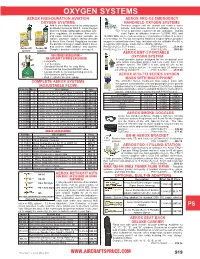
Oxygen Systems
OXYGEN SYSTEMS AEROX HIGH-DURATION AVIATION AEROX PRO-O2 EMERGENCY OXYGEN SYSTEMS HANDHELD OXYGEN SYSTEMS Add to your flying comfort by using oxygen Provides oxygen until the aircraft can reach a lower at altitudes as low as 5000 ft. Aerox Oxygen altitude. And because Pro-O2 is refillable, there is no CM Systems include lightweight aluminum cyl in- need to purchase replacement O2 cartridges. During ders, regulators, all hardware, flow meter, short flights at altitudes between 12,500ft. MSL and and nasal cannulas (masks available as 14,000ft. MSL where maneuvering over mountains or turbulent weather option). Oxysaver oxygen saving cannulas is necessary, the Pro-O2 emergency handheld oxygen system provides & Aerox Flow Control Regulators increase oxygen to extend these brief legs. Included with the refillable Pro-O2 is WP the duration of oxygen supply about 4 times, a regulator with gauge, mask and a refillable cylinder. and prevent nasal irritation and dryness. Pro-O2-2 (2 Cu. Ft./1 mask)........................P/N 13-02735 .........$328.00 Aerox 2D Aerox 4M Complete brochure available on request. Pro-O2-4 (2 Cu. Ft./2 masks) ......................P/N 13-02736 .........$360.00 system system AEROX EMT-3 PORTABLE 500 SERIES REGULATOR – AN AIRCRAFT SPRUCE EXCLUSIVE! OXYGEN SYSTEM ME A small portable system designed for the occasional user • Low profile who wants something smaller and less costly than a full • 1, 2, & 4 place portable system. The EMT-3 is also ideal for use as an • Standard Aircraft filler for easy filling emergency oxygen system. The system lasts 25 minutes at • Convenient top mounted ON/OFF valve 2.5 LPM @ 25,000 FT. -

Vistara Soars Toward Expansion New Flight-Planning Technology Enhances Safety, Cuts Costs
MOBILITY ENGINEERINGTM AUTOMOTIVE, AEROSPACE, OFF-HIGHWAY A quarterly publication of and Vistara soars toward expansion New flight-planning technology enhances safety, cuts costs Base-engine value engineering Deriving optimum efficiency, performance Autos & The Internet of Things How the IoT is disrupting the auto industry Software’s expanding role Escalating software volumes shifting design, systems integration Volume 3, Issue 2 June 2016 ME Molex Ad 0616.qxp_Mobility FP 4/28/16 5:00 PM Page 1 Support Tomorrow’s Speeds with Proven Connectivity Simply Solved In Automotive, consumer demand is changing even faster than technology. When you collaborate with Molex, we can develop a complete solution that will support tomorrow’s data speeds, backed by proven performance. Together, we can simplify your design and manufacturing processes — while minimizing space and maximizing connectivity throughout the vehicle. www.molex.com/a/connectedvehicle/in CONTENTS Features 40 Base-engine value engineering 49 Agility training for cars for higher fuel efficiency and AUTOMOTIVE CHASSIS enhanced performance Chassis component suppliers refine vehicle dynamics at AUTOMOTIVE POWERTRAIN the high end and entry level with four-wheel steering and adaptive damping. Continuous improvement in existing engines can be efficiently achieved with a value engineering approach. The integration of product development with value 52 Evaluating thermal design of engineering ensures the achievement of specified targets construction vehicles in a systematic manner and within a defined timeframe. OFF-HIGHWAY SIMULATION CFD simulation is used to evaluate two critical areas that 43 Integrated system engineering address challenging thermal issues: electronic control units for valvetrain design and and hot-air recirculation. development of a high-speed diesel engine AUTOMOTIVE POWERTRAIN The lead time for engine development has reduced significantly with the advent of advanced simulation Cover techniques. -

United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep
United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep. 8, 1987 54 JET AIRPLANE gravity. Full control of the airplane is possible under 76 Inventor: Vibert F. Greene, 19400 Sorenson high maneuverability conditions, extremely high accel Ave., Cupertino, Calif. 95014 erations and at large angles of attack. The delta nose wing creates swirling vortices that contribute substan 21 Appl. No.: 875,024 tially to the lift of the nose section. The winglet, an 22). Filed: Jun. 16, 1986 extension of the delta nose wing, allows the turbulent wake from the leading edge of the delta nose wing to 51 Int. Cl." .............................................. B64C39/08 flow over its upper surface to create additional lift while 52 U.S.C. .................................... 244/45 R; 24.4/13; the midspan wing causes the turbulent flow over its 244/45 A; 244/15 upper surface to form a turbulent wake at its leading 58 Field of Search .................. 244/45 R, 45 A, 4 R, edge. The V-tail delta wing with a V-shaped underside 244/15, 13 and blunt leading edge gives additional lift and control (56) References Cited to the airplane. A flow regulator helps to direct and U.S. PATENT DOCUMENTS control the flow field to the underside of the delta nose D. 138,538 8/1944 Clerc .................................. D12/331 wing and nose strake. There are eight pairs of control D. 155,569 10/1949 Bailey ............ ... D12/331 surfaces including an upper body stabilizer system for 3,447,76 6/1969 Whitener et al. ..................... 244/5 the control and stability of the airplane. -

Water-Tunnel and Analytical Investigation of the Effect of Strake
https://ntrs.nasa.gov/search.jsp?R=19800019803 2020-03-21T17:02:56+00:00Z NASA TP " 1676 NASA Technical Paper 1676 ,.,I c. 1 Water-Tunneland Analytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown. Characteristics Neal T. Frink and John E. Lamar AUGUST 1980 TECH LIBRARY KAFB, NM NASA Technical Paper 1676 Water-Tunnel andAnalytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown Characteristics Neal T. Frink andJohn E. Lamar Lavzgley Research Cetzter Haznptorz, Virgivzia National Aeronautics and Space Administration Scientific and Technical Information Branch 1980 SUMMARY A systematic water tunnel study was made to determine the vortex breakdown characteristics of43 strakes, more than half of which were generated from a new analytical strake design method. The strakes were mountedon a l/2-scale model of a Langley Research Center general research fighter fuselage mode1 with a 44O leading-edge-sweep trapezoidal wing. This study develops, in conjunction with a common wing-body, a parametric set of strake data for use in establishing and verifying a new strake design procedure. To develop this parametric data base, several series of isolated strakes were designedon the basis of a simplified approach which relates pre- scribed suction and pressure distributions in a simplified flow field to plan- form shapes. The resulting planform shapes provided examples of the effects of the pri- mary design parameters of size, span, and slenderness on the vortex breakdown characteristics. These effects are analyzed in relation to the respective strake leading-edge suction distributions. Included are examples of the effects of detailed strake planform shaping for strakes with the same general size and slenderness.