Hybrid RF/VLC Network Architecture for the Internet of Things
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Us 2019 / 0319868 A1
US 20190319868A1 ( 19) United States (12 ) Patent Application Publication ( 10) Pub . No. : US 2019 /0319868 A1 Svennebring et al. ( 43 ) Pub . Date : Oct. 17 , 2019 ( 54 ) LINK PERFORMANCE PREDICTION (52 ) U . S . CI. TECHNOLOGIES CPC .. .. H04L 43/ 0882 (2013 . 01 ); H04W 24 /08 ( 2013 . 01 ) (71 ) Applicant : Intel Corporation , Santa Clara , CA (57 ) ABSTRACT (US ) Various systems and methods for determining and commu nicating Link Performance Predictions (LPPs ), such as in ( 72 ) Inventors : Jonas Svennebring , Sollentuna (SE ) ; connection with management of radio communication links, Antony Vance Jeyaraj, Bengaluru ( IN ) are discussed herein . The LPPs are predictions of future network behaviors /metrics ( e . g . , bandwidth , latency , capac (21 ) Appl . No. : 16 /452 , 352 ity , coverage holes , etc . ) . The LPPs are communicated to applications and /or network infrastructure, which allows the applications/ infrastructure to make operational decisions for ( 22 ) Filed : Jun . 25 , 2019 improved signaling / link resource utilization . In embodi ments , the link performance analysis is divided into multiple layers that determine their own link performance metrics, Publication Classification which are then fused together to make an LPP. Each layer (51 ) Int . Cl. runs different algorithms, and provides respective results to H04L 12 / 26 ( 2006 .01 ) an LPP layer /engine that fuses the results together to obtain H04W 24 / 08 (2006 .01 ) the LPP . Other embodiments are described and / or claimed . 700 Spatio - Temporal History Data Tx1 : C1 TIDE _ 1, DE _ 2 . .. Txt : C2 T2 DE _ 1 , DE _ 2 , . .. win Txs : C3 122 T : DE _ 1, DE _ 2 , .. TN DE _ 1 , DE _ 2 .. TxN : CN CELL LOAD MODEL 710 Real- Time Data 744 704 Patent Application Publication Oct. -

Engineered Computer Appliance
Network Video Recorder (NVR) DATASHEET Engineered Computer Appliance Even small businesses deserve top-of-the-line CCTV technology that is durable, feature- packed and cost efficient. The MX Series performs like a pro, yet is easy on your pocket. Powerful recording and live display tech- nology Up to 32 HD channel inputs Up to 30 days of continuous video storage Active video storage and network protection Supports up to 4 hot-swap dedicated video storage hard disks Automatic daily hard disk drive health check, disk guard and recording activity for potential CCTV no recording monitoring. DATASHEET revision 201407311800 Dedicated Video Storage Video storage configurations Four hot swap HDDs bay for dedicated video storage support 720HD@32CH, 30days: 16TB (4TBx 4unit) four 3.5-inch SATA HDDs. 1080HD@16CH, 30days: 16TB (4TB x 4unit) One internal SSD for OS use only. Max dedicated video storage: 16TB (4TB x 4unit) Triple monitor output supported Live Display Performance (for HDCCTV) DVI* / HDMI / DP 1080HD 16CH (2.86Mbps) 12FPS each CH Max resolution 4096x2304 (4k, HDMI/DP) 720HD 16CH (1.43Mbps) 24FPS each CH Max resolution 1920x1200 (DVI*) 720HD 32CH (1.43Mbps) 07FPS each CH *Supports DVI to VGA Conversion NOTE: Performance may very depend on video surveillance software. Networking Processor, memory, audio Single LAN (RJ45 connector) Intel i5 Quad-core 4 threads processor 10/100/1000Base-T Gigabit Ethernet 4GB system memory, 1600MHz DDR3 Audio line out jack, 3.5mm (Green) Heartbeat Security Key Programmable micro controller for system auto healing and 128-bit Blowfish encryption algorithms. monitoring. Digital I/O. connectable to CMS Alarm. -
ONVIF PTZ Device Test Specification V17.06
ONVIF PTZ Device Test Specification Version 17.06 ONVIF™ PTZ Device Test Specification Version 17.06 June 2017 www.onvif.org ONVIF PTZ Device Test Specification Version 17.06 © 2017 ONVIF, Inc. All rights reserved. Recipients of this document may copy, distribute, publish, or display this document so long as this copyright notice, license and disclaimer are retained with all copies of the document. No license is granted to modify this document. THIS DOCUMENT IS PROVIDED "AS IS," AND THE CORPORATION AND ITS MEMBERS AND THEIR AFFILIATES, MAKE NO REPRESENTATIONS OR WARRANTIES, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO, WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, NON-INFRINGEMENT, OR TITLE; THAT THE CONTENTS OF THIS DOCUMENT ARE SUITABLE FOR ANY PURPOSE; OR THAT THE IMPLEMENTATION OF SUCH CONTENTS WILL NOT INFRINGE ANY PATENTS, COPYRIGHTS, TRADEMARKS OR OTHER RIGHTS. IN NO EVENT WILL THE CORPORATION OR ITS MEMBERS OR THEIR AFFILIATES BE LIABLE FOR ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE OR CONSEQUENTIAL DAMAGES, ARISING OUT OF OR RELATING TO ANY USE OR DISTRIBUTION OF THIS DOCUMENT, WHETHER OR NOT (1) THE CORPORATION, MEMBERS OR THEIR AFFILIATES HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES, OR (2) SUCH DAMAGES WERE REASONABLY FORESEEABLE, AND ARISING OUT OF OR RELATING TO ANY USE OR DISTRIBUTION OF THIS DOCUMENT. THE FOREGOING DISCLAIMER AND LIMITATION ON LIABILITY DO NOT APPLY TO, INVALIDATE, OR LIMIT REPRESENTATIONS AND WARRANTIES MADE BY THE MEMBERS AND THEIR RESPECTIVE AFFILIATES TO THE CORPORATION AND OTHER MEMBERS IN CERTAIN WRITTEN POLICIES OF THE CORPORATION. 2 www.onvif.org ONVIF PTZ Device Test Specification Version 17.06 REVISION HISTORY Vers. -
White Paper Perimeter Security with the Aqueti Camera Ensemble
White Paper Perimeter Security with the Aqueti Camera Ensemble March 2019 Copyright Notice Copyright 2019 Aqueti™. All rights reserved. Aqueti Incorporated 3333 Durham-Chapel Hill Blvd. Suite D-100 Durham, NC 27707 USA 919-666-7480 www.aqueti.com Disclaimer This document provides information “as is” without warranty of any kind. Aqueti disclaims all warranties, either expressed or implied, including the warranties of merchantability and fitness for a purpose. In no event shall Aqueti be liable for any damages whatsoever including direct, indirect, incidental, consequential, loss of business profits, or special damages, even if Aqueti or its suppliers advise of the possibility of such changes. Document Lifecycle Aqueti may occasionally update product documentation between releases of the related software. To ensure you have the most current information, refer to www.aqueti.com. Publication Date Perimeter Security with the Aqueti Camera Ensemble March 2019 Trademarks Aqueti, the “Q” logo, and “Aqueti Reinventing Resolution” are registered trademarks of Aqueti Incorporated. All other brands and product names are registered trademarks or trademarks of their respective holders and are used only for reference where specifically needed without any intent to infringe. All other product and company names may be trademarks or registered trademarks of their respective companies. Getting Help For product information, updates, licensing, documentation, and service, visit www.aqueti.com. For support inquiries, use [email protected]. www.aqueti.com 2 [email protected] Contents Introduction . 4 Aqueti Mantis . 5 Aqueti Pathfinder . 6 Aqueti Camera Ensemble Overview. 7 Aqueti Imaging System vs. Traditional PTZ . 8 Defending Your Perimeter with the Mantis . 9 Aqueti System Data Sheets . -
Department of Finance and Administration
STATE OF ARKANSAS REVENUE LEGAL COUNSEL Department of Finance Post Office Box 1272, Room 2380 Little Rock, Arkansas 72203-1272 and Administration Phone: (501) 682-7030 Fax: (501) 682-7599 http://www.arkansas.gov/dfa October 25, 2017 RE: Taxability of Computer Service Sales Opinion 20170708 Dear : You have requested a legal opinion concerning the sales tax liability of certain sales made by a computer service company. Your letter dated June 30, 2017, states: has reviewed the Arkansas Gross Receipts Tax Rules, Compensating Use Tax Rules, and Special Excise Tax Rules. The company focused their attention to GR-25 and GR-39 respectively in relation to practices and the established rules. requests a legal opinion on how each of the main practices performed within the company fits within the established rules. Services – Interpretation of NONTAXABLE sales and service This document will discuss at length the following business activities performed by . The activities below constitute the “bulk” of daily technical services performed. ▪Factory Restore ▪Transfer User Data ▪Password Reset ▪Pickup / Delivery / Travel ▪Remote Technical Support ▪Showroom Diagnostics ▪Field Service Call ▪Electronic Software Purchases ▪Offsite Backup Subscription Services ▪Internet Hosting Service Subscription ▪General Services ▪Website Design and Ongoing Website Maintenance You have asked whether sales of certain computing service activities are subject to gross receipts tax in Arkansas? Before addressing the specifics of your request, it is necessary to discuss several points that are applicable to this opinion as a whole. As a preliminary matter, sales and use tax is levied upon the gross proceeds or gross receipts derived from all sales of tangible personal property and certain enumerated services. -
Personal Multimedia Devices for Capturing and Consuming
Chapter 3 Personal Multimedia Devices for Capturing and Consuming Abstract Flip Many libraries are trying to get involved with the cur- While video cameras rent explosion of self-produced media, in terms of creat- have been steadily ing media, consuming it, and helping patrons create it. dropping in price for This chapter of “Gadgets and Gizmos: Personal Elec- years, it wasn’t until tronics and the Library” will outline popular devices 2006 when the Flip for capturing and consuming video, audio, and other company began selling media types. its eponymous camera (see figure 8) that the landscape changed sig- 2 Video nificantly. The Flip was the first all-in-one cam- Over the last decade, no media type has been more democ- era that was everything ratized than video. The cost of producing a video has gone the consumer needed, from thousands of dollars for poor-quality pictures to less and nothing else. than $200 for a camera that will take high-definition video Cameras—video April 2010 April and can also double as a still camera. With the decline cameras in particu- in the price of producing video has come the ability to lar—had maintained publish your video at no cost online, through services like complexity of their YouTube, Vimeo, Blip.tv, and others. These two factors operations, assuming have led to the largest explosion of video production the that someone who was world has ever seen, with YouTube alone having 20 hours shooting video wanted Figure 8 A Flip video camera, one of the 1 the manual control to of video uploaded to it every minute of every day. -

Before the Patent Trial and Appeal Board
UNITED STATES PATENT AND TRADEMARK OFFICE ——————— BEFORE THE PATENT TRIAL AND APPEAL BOARD ——————— Cisco Systems, Inc., Petitioner ——————— Case IPR2017-01933 ——————— PETITION FOR INTER PARTES REVIEW OF U.S. PATENT NO. 8,478,799 1 Petition for Inter Partes Review of U.S. Patent No. 8,478,799 TABLE OF CONTENTS PETITIONER’S EXHIBIT LIST .............................................................................. 5 I. Mandatory Notices ........................................................................................... 13 A. Real Party-in-Interest ............................................................................... 13 B. Related Matters ........................................................................................ 13 C. Lead and Back-up Counsel and Service Information ............................. 13 II. Grounds for Standing ....................................................................................... 14 III. Introduction ...................................................................................................... 14 IV. Relief Requested and Overview of Reasons Therefor .................................... 15 V. Description of the Technology ........................................................................ 15 A. Evolution of Computer Storage Systems ................................................ 15 B. Cryptographic Hash ................................................................................. 16 C. The ’799 Patent ....................................................................................... -
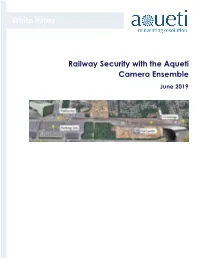
White Paper Railway Security with the Aqueti Camera Ensemble
White Paper Railway Security with the Aqueti Camera Ensemble June 2019 Copyright Notice Copyright 2019 Aqueti™. All rights reserved. Aqueti Incorporated 3333 Durham-Chapel Hill Blvd. Suite D-100 Durham, NC 27707 USA 919-666-7480 www.aqueti.com Disclaimer This document provides information “as is” without warranty of any kind. Aqueti disclaims all warranties, either expressed or implied, including the warranties of merchantability and fitness for a purpose. In no event shall Aqueti be liable for any damages whatsoever including direct, indirect, incidental, consequential, loss of business profits, or special damages, even if Aqueti or its suppliers advise of the possibility of such changes. Document Lifecycle Aqueti may occasionally update product documentation between releases of the related software. To ensure you have the most current information, refer to www.aqueti.com. Publication Date Railway Security with the Aqueti Camera Ensemble June 2019 Trademarks Aqueti, the “Q” logo, and “Aqueti Reinventing Resolution” are registered trademarks of Aqueti Incorporated. All other brands and product names are registered trademarks or trademarks of their respective holders and are used only for reference where specifically needed without any intent to infringe. All other product and company names may be trademarks or registered trademarks of their respective companies. Getting Help For product information, updates, licensing, documentation, and service, visit www.aqueti.com. For support inquiries, use [email protected]. www.aqueti.com 2 [email protected] Contents Introduction . 4 Aqueti Mantis . 5 Aqueti Pathfinder . 6 Aqueti Camera Ensemble Overview. 7 Aqueti Imaging System vs. Traditional Fixed Cameras . 8 Defending Your Rail Yards. 9 Monitoring Multiple Crossings with One Pathfinder . -

Optimization and Visualization of Strategies for Platforms
Optimization and Visualization of Strategies for Platforms, Complements, and Services. by Richard B. LeVine BA, Psychology, State University of New York at Albany, 1980 MS, Computer Science, Union College, Schenectady New York, 1986 SUBMITTED TO THE ALFRED P. SLOAN SCHOOL OF MANAGEMENT IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTERS OF SCIENCE at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 2003 ©2003 Richard B. LeVine. All rights reserved. The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of Author: Alfred P. Sloan School of Management May 8, 2003 Certified by: Professor James Utterback, Chair, Management of Technology Program Reader Certified by: Professor Michael Cusumano, Sloan Management Review Distinguished Professor of Management Thesis Supervisor Accepted by: David Weber Director, Management of Technology Program 1 of 160 Optimization and Visualization of Strategies for Platforms, Complements, and Services by Richard B. LeVine Submitted to the Alfred P. Sloan School of Management on May 8, 2003, in Partial Fulfillment of the Requirement for the Degree of Masters of Science. Abstract This thesis probes the causal elements of product platform strategies and the effects of platform strategy on a firm. Platform strategies may be driven by internal or external forces, and the lifecycle of a firm and of a platform strategy evolve over time in response to both the needs of the firm and the changes in the external environment. This external environment may consist of a “platform ecology,” in which the platform strategies of firms affect one another. -
Here Were Eminent Invited Persons with Expertise in the Field of FOSS Present There to Guide Them
1 Contents 1 Foreword………………………………………………………………………………….05 2 Day 1: 20 December 2017 2.1 Conference Keynote: “Software Freedom Conservancy”…………………06 2.2 Inaugural Session…………………………………………………………..11 2.3 Venue 01 2.3.1 GNU Health in the Context of Integrative and Precision Medicine……….18 2.3.2 RedHat……………………………………………………………………...19 2.3.3 Eliminating “Black Boxes” from Your Life: Using Free Software, Free Hardware & Self-Hosting…………………………………………………..21 2.3.4 Open Data Kit and Openstreetmap…………………………………………25 2.3.5 Building a Collaborative Economy over Networks held in Commons…….26 2.3.6 Women Hackathon………………………………………………………….27 2.4 Venue 02 2.4.1 How can FOSS Empower Me?……………………………………………..29 2.5 Venue 03 2.5.1 Affordable & Opensource Assistive Technology Solutions for People with Physical Disabilities: AsTeRICS, FABI and the Flip Mouse……………….34 2.5.2 Being Human in an Open Source Driven 4th Industrial Revolution………...35 2.5.3 Manually Building Your Own Tile Server with OSM………………………37 2.5.4 Introduction to Micro Services……………………………………………...39 2.5.5 The Role of Open Source Hardware in Healthcare………………………....40 2.5.6 Build Your Own Block Chain with Free Software…………………………42 2.5.7 Cultural Event……………………………………………………………….42 2 3 Day 2: 21 Dec 2017 3.1 Plenary Talk………………………………………………………………….43 3.2 Venue 01 3.2.1 Electronic Health Records in Low Resource Settings……………………....44 3.2.2 Internet Infrastructure,Values and Politics…………………………………..47 3.2.3 IT Initiatives of Kerala State Electricity Board Limited…………………….48 3.2.4 UNESCO and its Free Software Policy……………………………………...50 -

Redefining Technology Literacy Pedagogy and Practice
Utah State University DigitalCommons@USU All Graduate Theses and Dissertations Graduate Studies 5-2013 "iDilemmas" and Humanities Education: Redefining echnologyT Literacy Pedagogy and Practice Steven Richard Watts Utah State University Follow this and additional works at: https://digitalcommons.usu.edu/etd Part of the Higher Education Commons Recommended Citation Watts, Steven Richard, ""iDilemmas" and Humanities Education: Redefining echnologyT Literacy Pedagogy and Practice" (2013). All Graduate Theses and Dissertations. 1728. https://digitalcommons.usu.edu/etd/1728 This Thesis is brought to you for free and open access by the Graduate Studies at DigitalCommons@USU. It has been accepted for inclusion in All Graduate Theses and Dissertations by an authorized administrator of DigitalCommons@USU. For more information, please contact [email protected]. "IDILEMMAS" AND HUMANITIES EDUCATION: REDEFINING TECHNOLOGY LITERACY PEDAGOGY AND PRACTICE by Steven R. Watts A thesis submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in English Literature and Writing Approved: ______________________ ______________________ David Hailey Ryan M. Moeller Major Professor Committee Member ______________________ ______________________ Ronald Shook Mark McLellan Committee Member Vice President for Research and Dean of the School of Graduate Studies UTAH STATE UNIVERSITY Logan, Utah 2013 ii Copyright © Steven R. Watts 2013 All Rights Reserved iii ABSTRACT "iDilemmas" and Humanities Education: Redefining Technology Literacy Pedagogy and Practice by Steven R. Watts, Master of Science Utah State University, 2013 Major Professor: Dr. David Hailey Department: English U.S. and global citizens will increasingly be called upon to navigate complex social issues surrounding information and communication technologies (ICTs). At the start of the 21st century, humanities educators are uniquely positioned to impact the ways technology literacy is taught and learned in secondary and post-secondary educational settings. -

Interactive Projections: the Mechanics of Interactive Video Design
Interactive Projections: The Mechanics of Interactive Video Design An Honors Thesis (HONR 499) by Selena Webb Thesis Advisor Mr. Brian Moore Ball State University Muncie, Indiana May 2019 Expected Date of Graduation May 2019 Abstract: As an incoming Freshman at Ball State, I knew two things for certa·m: I had a passion for theatre, and I wanted to pursue a career in video. For all I knew, these were separate worlds. Theatre is based on live performance, and is meant to be beautiful in the moment. Often times video recording is prohibited in theatrical performances not just for legal reasons, it is simply not how the art form is meant to be consumed. Theatre is meant to be seen and experienced live and in person. Video on the other hand exists in a world of re-takes and post enhancements that allow it to be fine-tuned into a perfect and deliverable product. Combining the worlds of live and raw with edited and specific was something that I only imagined was possible, that is, until I found projections. Projection design is the art of creating and integrating assets such as video clips and motion graphics, with technology through projectors, cameras, monitors, even LED walls. This can be used to enhance a performance for theatre, dance, concerts, etc. However, projections can be taken one step further. Instead of simply playing content and projecting ·It into a space, I wanted to explore interacting with the content as well. When it comes to the interactive world, there are an infinite amount of possibilities, and from all of my projection design experience from designing theatrical shows, I have never been asked, or challenged, to do an interactive piece.