Arxiv:1803.08407V3 [Cs.CV] 27 Jul 2018
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hardware Support for Non-Photorealistic Rendering
Hardware Support for Non-photorealistic Rendering Ramesh Raskar MERL, Mitsubishi Electric Research Labs (ii) Abstract (i) Special features such as ridges, valleys and silhouettes, of a polygonal scene are usually displayed by explicitly identifying and then rendering ‘edges’ for the corresponding geometry. The candidate edges are identified using the connectivity information, which requires preprocessing of the data. We present a non- obvious but surprisingly simple to implement technique to render such features without connectivity information or preprocessing. (iii) (iv) At the hardware level, based only on the vertices of a given flat polygon, we introduce new polygons, with appropriate color, shape and orientation, so that they eventually appear as special features. 1 INTRODUCTION Figure 1: (i) Silhouettes, (ii) ridges, (iii) valleys and (iv) their combination for a polygonal 3D model rendered by processing Sharp features convey a great deal of information with very few one polygon at a time. strokes. Technical illustrations, engineering CAD diagrams as well as non-photo-realistic rendering techniques exploit these features to enhance the appearance of the underlying graphics usually not supported by rendering APIs or hardware. The models. The most commonly used features are silhouettes, creases rendering hardware is typically more suited to working on a small and intersections. For polygonal meshes, the silhouette edges amount of data at a time. For example, most pipelines accept just consists of visible segments of all edges that connect back-facing a sequence of triangles (or triangle soups) and all the information polygons to front-facing polygons. A crease edge is a ridge if the necessary for rendering is contained in the individual triangles. -
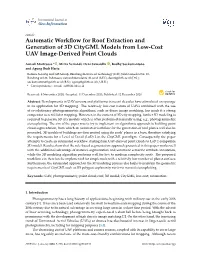
Automatic Workflow for Roof Extraction and Generation of 3D
International Journal of Geo-Information Article Automatic Workflow for Roof Extraction and Generation of 3D CityGML Models from Low-Cost UAV Image-Derived Point Clouds Arnadi Murtiyoso * , Mirza Veriandi, Deni Suwardhi , Budhy Soeksmantono and Agung Budi Harto Remote Sensing and GIS Group, Bandung Institute of Technology (ITB), Jalan Ganesha No. 10, Bandung 40132, Indonesia; [email protected] (M.V.); [email protected] (D.S.); [email protected] (B.S.); [email protected] (A.B.H.) * Correspondence: arnadi_ad@fitb.itb.ac.id Received: 6 November 2020; Accepted: 11 December 2020; Published: 12 December 2020 Abstract: Developments in UAV sensors and platforms in recent decades have stimulated an upsurge in its application for 3D mapping. The relatively low-cost nature of UAVs combined with the use of revolutionary photogrammetric algorithms, such as dense image matching, has made it a strong competitor to aerial lidar mapping. However, in the context of 3D city mapping, further 3D modeling is required to generate 3D city models which is often performed manually using, e.g., photogrammetric stereoplotting. The aim of the paper was to try to implement an algorithmic approach to building point cloud segmentation, from which an automated workflow for the generation of roof planes will also be presented. 3D models of buildings are then created using the roofs’ planes as a base, therefore satisfying the requirements for a Level of Detail (LoD) 2 in the CityGML paradigm. Consequently, the paper attempts to create an automated workflow starting from UAV-derived point clouds to LoD 2-compatible 3D model. -

A Unified Algorithmic Framework for Multi-Dimensional Scaling
A Unified Algorithmic Framework for Multi-Dimensional Scaling † ‡ Arvind Agarwal∗ Jeff M. Phillips Suresh Venkatasubramanian Abstract In this paper, we propose a unified algorithmic framework for solving many known variants of MDS. Our algorithm is a simple iterative scheme with guaranteed convergence, and is modular; by changing the internals of a single subroutine in the algorithm, we can switch cost functions and target spaces easily. In addition to the formal guarantees of convergence, our algorithms are accurate; in most cases, they converge to better quality solutions than existing methods, in comparable time. We expect that this framework will be useful for a number of MDS variants that have not yet been studied. Our framework extends to embedding high-dimensional points lying on a sphere to points on a lower di- mensional sphere, preserving geodesic distances. As a compliment to this result, we also extend the Johnson- 2 Lindenstrauss Lemma to this spherical setting, where projecting to a random O((1=" ) log n)-dimensional sphere causes "-distortion. 1 Introduction Multidimensional scaling (MDS) [23, 10, 3] is a widely used method for embedding a general distance matrix into a low dimensional Euclidean space, used both as a preprocessing step for many problems, as well as a visualization tool in its own right. MDS has been studied and used in psychology since the 1930s [35, 33, 22] to help visualize and analyze data sets where the only input is a distance matrix. More recently MDS has become a standard dimensionality reduction and embedding technique to manage the complexity of dealing with large high dimensional data sets [8, 9, 31, 6]. -

Geant4 Integration Status
Geant4 integration status ● All CMS shapes integrated: box, tube, trapezoid, cone, polycone, and polyhedra – stress-tested with Geant4 test job FullCMS, a few warnings printed multiple times, ~ all of them coming from polycone or polyhedron special cases. – several fixes uploaded, job still crashes using VecGeom shapes (runs to the end using Geant4 or USolids shapes) ● ...and a few more: Trd, torus2, paraboloid, orb, sphere – integrated, but not stress-tested yet, since not used in FullCMS geant4 test job. G. Lima – GeantV weekly meeting – 2015/10/27 1 During code sprint ● With Sandro, fixed few more bugs with the tube (point near phi- section surface) and polycone (near a ~vertical section) ● Changes in USolids shapes, to inherit from specialized shapes instead of “simple shapes” ● Crashes due to Normal() calculation returning (0,0,0) when fully inside, but at the z-plane between sections z Both sections need to be checked, and several possible section outcomes Q combined → normals added: +z + (-z) = (0,0,0) G. Lima – GeantV weekly meeting – 2015/10/27 2 Geant4 integration status ● What happened since our code sprint? – More exceptions related to Inside/Contains inconsistencies, triggered at Geant4 navigation tests ● outPoint, dir → surfPoint = outPoint + step * dir ● Inside(surfPoint) → kOutside (should be surface) Both sections need to be checked, several possible section outcomes combined, e.g. in+in = in surf + out = surf, etc... P G. Lima – GeantV weekly meeting – 2015/10/27 3 Geant4 integration status ● What happened after our code sprint? – Normal() fix required a similar set of steps → code duplication ● GenericKernelContainsAndInside() ● ConeImplementation::NormalKernel() (vector mode) ● UnplacedCone::Normal() (scalar mode) – First attempt involved Normal (0,0,0) and valid=false for all points away from surface --- unacceptable for navigation – Currently a valid normal is P always provided, BUT it is not always the best one (a performance priority choice) n G. -

Obtaining a Canonical Polygonal Schema from a Greedy Homotopy Basis with Minimal Mesh Refinement
JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 Obtaining a Canonical Polygonal Schema from a Greedy Homotopy Basis with Minimal Mesh Refinement Marco Livesu, CNR IMATI Abstract—Any closed manifold of genus g can be cut open to form a topological disk and then mapped to a regular polygon with 4g sides. This construction is called the canonical polygonal schema of the manifold, and is a key ingredient for many applications in graphics and engineering, where a parameterization between two shapes with same topology is often needed. The sides of the 4g−gon define on the manifold a system of loops, which all intersect at a single point and are disjoint elsewhere. Computing a shortest system of loops of this kind is NP-hard. A computationally tractable alternative consists in computing a set of shortest loops that are not fully disjoint in polynomial time using the greedy homotopy basis algorithm proposed by Erickson and Whittlesey [1], and then detach them in post processing via mesh refinement. Despite this operation is conceptually simple, known refinement strategies do not scale well for high genus shapes, triggering a mesh growth that may exceed the amount of memory available in modern computers, leading to failures. In this paper we study various local refinement operators to detach cycles in a system of loops, and show that there are important differences between them, both in terms of mesh complexity and preservation of the original surface. We ultimately propose two novel refinement approaches: the former minimizes the number of new elements in the mesh, possibly at the cost of a deviation from the input geometry. -

MATH 113 Section 8.1: Basic Geometry
Why Study Geometry? Formal Geometry Geometric Objects Conclusion MATH 113 Section 8.1: Basic Geometry Prof. Jonathan Duncan Walla Walla University Winter Quarter, 2008 Why Study Geometry? Formal Geometry Geometric Objects Conclusion Outline 1 Why Study Geometry? 2 Formal Geometry 3 Geometric Objects 4 Conclusion Why Study Geometry? Formal Geometry Geometric Objects Conclusion Geometry in History Our modern concept of geometry started more than 2000 years ago with the Greeks. Plato’s Academy To the Greeks, what we would call mathematics was merely a tool to the study of Geometry. Tradition holds that the inscription above the door of Plato’s Academy read: “Let no one ignorant of Geometry enter.” Geometry is one of the fields of mathematics which is most directly related to the world around us. For that reason, it is a very important part of elementary school mathematics. Why Study Geometry? Formal Geometry Geometric Objects Conclusion The Study of Shapes One way to look at geometry is as the study of shapes, their relationships to each other, and their properties. How is Geometry Useful? measuring land for maps building plans schematics for drawings artistic portrayals others? Why Study Geometry? Formal Geometry Geometric Objects Conclusion Tetris and Mathematical Thinking Geometry is also useful in stimulating mathematics thinking. Take for example the game of Tetris. Mathematical Thinking and Tetris Defining Terms What is a tetronimo? It is more than just “four squares put together.” Spatial Sense and Probability What are good strategies for playing Tetris? Statistics Measure improvement by recording scores and comparing early scores to later scores. Congruence Which pieces are the same and which are actually different? Problem Solving How many Tetris pieces are there? Tessellation Which tetronimo will cover a surface with no gaps? Geometry and Algebra How does the computer version of Tetris work? Why Study Geometry? Formal Geometry Geometric Objects Conclusion Two Types of Geometry Traditionally, geometry in education can be divided into two distinct types. -

3.3 Convex Polyhedron
UCC Library and UCC researchers have made this item openly available. Please let us know how this has helped you. Thanks! Title Statistical methods for polyhedral shape classification with incomplete data - application to cryo-electron tomographic images Author(s) Bag, Sukantadev Publication date 2015 Original citation Bag, S. 2015. Statistical methods for polyhedral shape classification with incomplete data - application to cryo-electron tomographic images. PhD Thesis, University College Cork. Type of publication Doctoral thesis Rights © 2015, Sukantadev Bag. http://creativecommons.org/licenses/by-nc-nd/3.0/ Embargo information No embargo required Item downloaded http://hdl.handle.net/10468/2854 from Downloaded on 2021-10-04T09:40:50Z Statistical Methods for Polyhedral Shape Classification with Incomplete Data Application to Cryo-electron Tomographic Images A thesis submitted for the degree of Doctor of Philosophy Sukantadev Bag Department of Statistics College of Science, Engineering and Food Science National University of Ireland, Cork Supervisor: Dr. Kingshuk Roy Choudhury Co-supervisor: Prof. Finbarr O'Sullivan Head of the Department: Dr. Michael Cronin May 2015 IVATIONAL UNIVERSITY OF IRELAIYT}, CORK I)ate: May 2015 Author: Sukantadev Bag Title: Statistical Methods for Polyhedral Shape Classification with Incomplete Data - Application to Cryo-electron Tomographic Images Department: Statistics Degree: Ph. D. Convocation: June 2015 I, Sukantadev Bag ce*iff that this thesis is my own work and I have not obtained a degee in this rmiversity or elsewhere on the basis of the work submitted in this thesis. .. S**ka*h*&.u .....@,,.,. [Signature of Au(}ror] T}IE AI,ITHOR RESERVES OT}IER PUBLICATION RTGHTS, AND NEITIIER THE THESIS NOR EXTENSTVE EXTRACTS FROM IT MAY BE PRINTED OR OTHER- WISE REPRODUCED WTT-HOI.TT TI{E AUTHOR'S WRITTEN PERMISSION. -
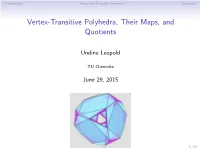
Vertex-Transitive Polyhedra, Their Maps, and Quotients
Introduction Maps and Encoded Symmetry Quotients Vertex-Transitive Polyhedra, Their Maps, and Quotients Undine Leopold TU Chemnitz June 29, 2015 1 / 26 Introduction Maps and Encoded Symmetry Quotients Polyhedra Definition 1.1 A polyhedron P is a closed, connected, orientable surface 3 embedded in E which is tiled by finitely many plane simple polygons in a face-to-face manner. The polygons are called faces of P, their vertices and edges are called the vertices and edges of P, respectively. Note: Coplanar and non-convex faces are allowed. 2 / 26 Introduction Maps and Encoded Symmetry Quotients Polyhedra, Polyhedral Maps, and Symmetry A polyhedron P is the image of a polyhedral map M on a surface 3 under a polyhedral embedding f : M ! E . We call M the underlying polyhedral map of P. P is a polyhedral realization of M. geometric symmetry group of a polyhedron: G(P) ⊂ O(3) automorphism group of its underlying map M: Γ(M) G(P) is isomorphic to a subgroup of Γ(M). Definition 1.2 P is (geometrically) vertex-transitive if G acts transitively on the vertices of P. Can we find all combinatorial types of geometrically vertex-transitive polyhedra (of higher genus g ≥ 2)? 3 / 26 Introduction Maps and Encoded Symmetry Quotients Vertex-Transitive Polyhedra of Higher Genus • Gr¨unbaumand Shephard (GS, 1984): vertex-transitive polyhedra of positive genus exist • genus 1: two infinite two-parameter families based on prisms and antiprisms • genus 3; 5; 7; 11; 19: five examples, based on snub versions of Platonic solids • the combinatorially regular Gr¨unbaumpolyhedron (Gr¨unbaum (1999), Brehm, Wills) of genus 5 • most recent survey and a seventh example (of g = 11): G´evay, Schulte, Wills 2014 (GSW) related concept: uniformity (vertex-transitivity with regular faces) 4 / 26 Introduction Maps and Encoded Symmetry Quotients Vertex-Transitive Polyhedra { Examples of genus 11 image source: G´evay, Schulte, Wills, The regular Gr¨unbaum polyhedron of genus 5, Adv. -
Ball Grid Array (BGA) Packaging 14
Ball Grid Array (BGA) Packaging 14 14.1 Introduction The plastic ball grid array (PBGA) has become one of the most popular packaging alternatives for high I/O devices in the industry. Its advantages over other high leadcount (greater than ~208 leads) packages are many. Having no leads to bend, the PBGA has greatly reduced coplanarity problems and minimized handling issues. During reflow the solder balls are self-centering (up to 50% off the pad), thus reducing placement problems during surface mount. Normally, because of the larger ball pitch (typically 1.27 mm) of a BGA over a QFP or PQFP, the overall package and board assembly yields can be better. From a performance perspective, the thermal and electrical characteristics can be better than that of conventional QFPs or PQFPs. The PBGA has an improved design-to-produc- tion cycle time and can also be used in few-chip-package (FCPs) and multi-chip modules (MCMs) configurations. BGAs are available in a variety of types, ranging from plastic overmolded BGAs called PBGAs, to flex tape BGAs (TBGAs), high thermal metal top BGAs with low profiles (HL- PBGAs), and high thermal BGAs (H-PBGAs). The H-PBGA family includes Intel's latest packaging technology - the Flip Chip (FC)-style, H-PB- GA. The FC-style, H-PBGA component uses a Controlled Collapse Chip Connect die packaged in an Organic Land Grid Array (OLGA) substrate. In addition to the typical advantages of PBGA pack- ages, the FC-style H-PBGA provides multiple, low-inductance connections from chip to package, as well as, die size and cost benefits. -

On the Axiomatics of Projective and Affine Geometry in Terms of Line
On the axiomatics of projective and affine geometry in terms of line intersection Hans Havlicek∗ Victor Pambuccian Abstract By providing explicit definitions, we show that in both affine and projective geometry of di- mension ≥ 3, considered as first-order theories axiomatized in terms of lines as the only vari- ables, and the binary line-intersection predicate as primitive notion, non-intersection of two lines can be positively defined in terms of line-intersection. Mathematics Subject Classification (2000): 51A05, 51A15, 03C40, 03B30. Key Words: line-intersection, projective geometry, affine geometry, positive definability, Lyndon’s preservation theorem. M. Pieri [15] first noted that projective three-dimensional space can be axiomatized in terms of lines and line-intersections. A simplified axiom system was presented in [7], and two new ones in [17] and [10], by authors apparently unaware of [15] and [7]. Another axiom system was presented in [16, Ch. 7], a book devoted to the subject of three-dimensional projective line geometry. One of the consequences of [4] is that axiomatizability in terms of line-intersections holds not only for n-dimension projective geometry with n =3, but for all n ≥ 3. Two such axiomatizations were carried out in [14]. It follows from [5] that there is more than just plain axiomatizability in terms of line-intersections that can be said about projective geometry, and it is the purpose of this note to explore the statements that can be made inside these theories, or in other words to find the definitional equivalent for the theorems of Brauner [2], Havlicek [5], and Havlicek [6], which state that bijective mappings between the line sets of projective or affine spaces of the same dimension ≥ 3 which map intersecting lines into intersecting lines stem from collineations, or, for arXiv:1304.0224v1 [math.AG] 31 Mar 2013 three-dimensional projective spaces, from correlations. -

Exterior Orientation Improved by the Coplanarity Equation and Dem Generation for Cartosat-1
EXTERIOR ORIENTATION IMPROVED BY THE COPLANARITY EQUATION AND DEM GENERATION FOR CARTOSAT-1 Pantelis Michalis and Ian Dowman Department of Civil, Environmental and Geomatic Engineering, University College London, Gower Street, London WC1E 6BT, UK [pmike,idowman]@ge.ucl.ac.uk Commission I KEYWORDS: rigorous model, rational polynomials, collinearity, coplanarity, along track satellite imagery, DEM, ABSTRACT: In this paper the sensor model evaluation and DEM generation for CARTOSAT-1 pan stereo data is described. The model is tested on CARTOSAT-1 data provided under the ISPRS-ISRO Cartosat-1 Scientific Assessment Programme (C-SAP). The data has been evaluated using the along track model which is developed in UCL, and the Rational Polynomials Coefficient model (RPCs) model which is included in Erdas Photogrammetry Suite (EPS). A DEM is generated in EPS. However, the most important progress that is represented in this paper is the use of the Coplanarity Equation based on the UCL sensor model where the velocity and the rotation angles are not constant. The importance of coplanarity equation is analyzed in the sensor modelling procedure and in DEM generation process. 1. INTRODUCTION The way that the satellite motion is represented leads to different sensor models. It is possible to have an even more CARTOSAT-1 represents the third generation of Indian correlated model in the case that more parameters are used in remote sensing satellites. The main improvement from the this procedure, than are really needed. instrument point of view is the two panchromatic cameras pointing to the earth with different angles of view. The first Moreover, especially for the along track stereo images it one is looking at +26 deg. -
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination Marjorie Senechal Editor Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination with George Fleck and Stan Sherer 123 Editor Marjorie Senechal Department of Mathematics and Statistics Smith College Northampton, MA, USA ISBN 978-0-387-92713-8 ISBN 978-0-387-92714-5 (eBook) DOI 10.1007/978-0-387-92714-5 Springer New York Heidelberg Dordrecht London Library of Congress Control Number: 2013932331 Mathematics Subject Classification: 51-01, 51-02, 51A25, 51M20, 00A06, 00A69, 01-01 © Marjorie Senechal 2013 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publishers location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc.