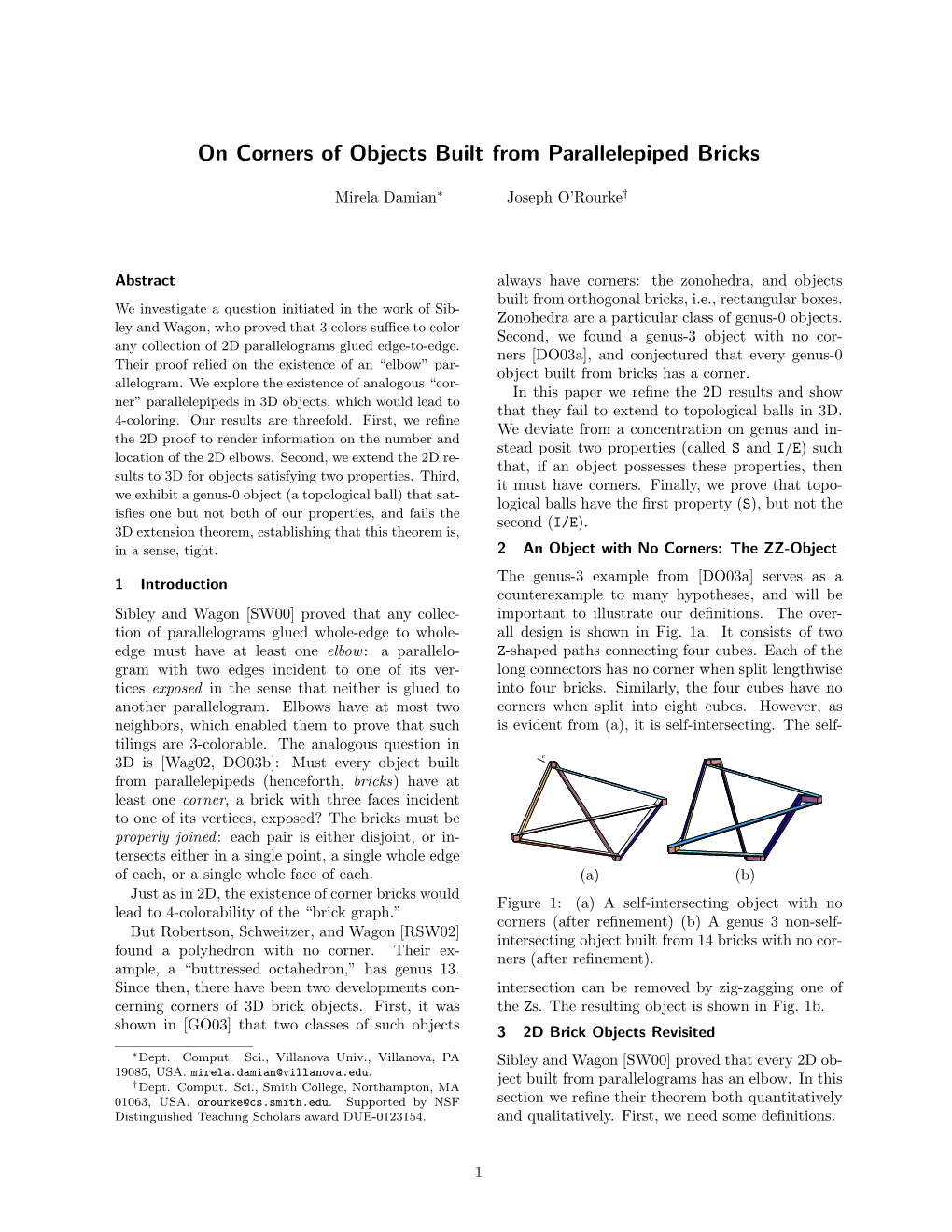
On Corners of Objects Built from Parallelepiped Bricks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Parallelepiped Based Approach
3D Modelling Using Geometric Constraints: A Parallelepiped Based Approach Marta Wilczkowiak, Edmond Boyer, and Peter Sturm MOVI–GRAVIR–INRIA Rhˆone-Alpes, 38330 Montbonnot, France, [email protected], http://www.inrialpes.fr/movi/people/Surname Abstract. In this paper, efficient and generic tools for calibration and 3D reconstruction are presented. These tools exploit geometric con- straints frequently present in man-made environments and allow cam- era calibration as well as scene structure to be estimated with a small amount of user interactions and little a priori knowledge. The proposed approach is based on primitives that naturally characterize rigidity con- straints: parallelepipeds. It has been shown previously that the intrinsic metric characteristics of a parallelepiped are dual to the intrinsic charac- teristics of a perspective camera. Here, we generalize this idea by taking into account additional redundancies between multiple images of multiple parallelepipeds. We propose a method for the estimation of camera and scene parameters that bears strongsimilarities with some self-calibration approaches. Takinginto account prior knowledgeon scene primitives or cameras, leads to simpler equations than for standard self-calibration, and is expected to improve results, as well as to allow structure and mo- tion recovery in situations that are otherwise under-constrained. These principles are illustrated by experimental calibration results and several reconstructions from uncalibrated images. 1 Introduction This paper is about using partial information on camera parameters and scene structure, to simplify and enhance structure from motion and (self-) calibration. We are especially interested in reconstructing man-made environments for which constraints on the scene structure are usually easy to provide. -

Area, Volume and Surface Area
The Improving Mathematics Education in Schools (TIMES) Project MEASUREMENT AND GEOMETRY Module 11 AREA, VOLUME AND SURFACE AREA A guide for teachers - Years 8–10 June 2011 YEARS 810 Area, Volume and Surface Area (Measurement and Geometry: Module 11) For teachers of Primary and Secondary Mathematics 510 Cover design, Layout design and Typesetting by Claire Ho The Improving Mathematics Education in Schools (TIMES) Project 2009‑2011 was funded by the Australian Government Department of Education, Employment and Workplace Relations. The views expressed here are those of the author and do not necessarily represent the views of the Australian Government Department of Education, Employment and Workplace Relations. © The University of Melbourne on behalf of the international Centre of Excellence for Education in Mathematics (ICE‑EM), the education division of the Australian Mathematical Sciences Institute (AMSI), 2010 (except where otherwise indicated). This work is licensed under the Creative Commons Attribution‑NonCommercial‑NoDerivs 3.0 Unported License. http://creativecommons.org/licenses/by‑nc‑nd/3.0/ The Improving Mathematics Education in Schools (TIMES) Project MEASUREMENT AND GEOMETRY Module 11 AREA, VOLUME AND SURFACE AREA A guide for teachers - Years 8–10 June 2011 Peter Brown Michael Evans David Hunt Janine McIntosh Bill Pender Jacqui Ramagge YEARS 810 {4} A guide for teachers AREA, VOLUME AND SURFACE AREA ASSUMED KNOWLEDGE • Knowledge of the areas of rectangles, triangles, circles and composite figures. • The definitions of a parallelogram and a rhombus. • Familiarity with the basic properties of parallel lines. • Familiarity with the volume of a rectangular prism. • Basic knowledge of congruence and similarity. • Since some formulas will be involved, the students will need some experience with substitution and also with the distributive law. -

Evaporationin Icparticles
The JapaneseAssociationJapanese Association for Crystal Growth (JACG){JACG) Small Metallic ParticlesProduced by Evaporation in lnert Gas at Low Pressure Size distributions, crystal morphologyand crystal structures KazuoKimoto physiosLaboratory, Department of General Educatien, Nago)ra University Various experimental results ef the studies on fine 1. Introduction particles produced by evaperation and subsequent conden$ation in inert gas at low pressure are reviewed. Small particles of metals and semi-metals can A brief historical survey is given and experimental be produced by evaporation and subsequent arrangements for the production of the particles are condensation in the free space of an inert gas at described. The structure of the stnoke, the qualitative low pressure, a very simple technique, recently particle size clistributions, small particle statistios and "gas often referred to as evaporation technique"i) the crystallographic aspccts ofthe particles are consid- ered in some detail. Emphasis is laid on the crystal (GET). When the pressure of an inert is in the inorphology and the related crystal structures ef the gas range from about one to several tens of Torr, the particles efsome 24 elements. size of the particles produced by GET is in thc range from several to several thousand nm, de- pending on the materials evaporated, the naturc of the inert gas and various other evaporation conditions. One of the most characteristic fea- tures of the particles thus produced is that the particles have, generally speaking, very well- defined crystal habits when the particle size is in the range from about ten to several hundred nm. The crystal morphology and the relevant crystal structures of these particles greatly interested sDme invcstigators in Japan, 4nd encouraged them to study these propenies by means of elec- tron microscopy and electron difliraction. -
Crystallography Ll Lattice N-Dimensional, Infinite, Periodic Array of Points, Each of Which Has Identical Surroundings
crystallography ll Lattice n-dimensional, infinite, periodic array of points, each of which has identical surroundings. use this as test for lattice points A2 ("bcc") structure lattice points Lattice n-dimensional, infinite, periodic array of points, each of which has identical surroundings. use this as test for lattice points CsCl structure lattice points Choosing unit cells in a lattice Want very small unit cell - least complicated, fewer atoms Prefer cell with 90° or 120°angles - visualization & geometrical calculations easier Choose cell which reflects symmetry of lattice & crystal structure Choosing unit cells in a lattice Sometimes, a good unit cell has more than one lattice point 2-D example: Primitive cell (one lattice pt./cell) has End-centered cell (two strange angle lattice pts./cell) has 90° angle Choosing unit cells in a lattice Sometimes, a good unit cell has more than one lattice point 3-D example: body-centered cubic (bcc, or I cubic) (two lattice pts./cell) The primitive unit cell is not a cube 14 Bravais lattices Allowed centering types: P I F C primitive body-centered face-centered C end-centered Primitive R - rhombohedral rhombohedral cell (trigonal) centering of trigonal cell 14 Bravais lattices Combine P, I, F, C (A, B), R centering with 7 crystal systems Some combinations don't work, some don't give new lattices - C tetragonal C-centering destroys cubic = P tetragonal symmetry 14 Bravais lattices Only 14 possible (Bravais, 1848) System Allowed centering Triclinic P (primitive) Monoclinic P, I (innerzentiert) Orthorhombic P, I, F (flächenzentiert), A (end centered) Tetragonal P, I Cubic P, I, F Hexagonal P Trigonal P, R (rhombohedral centered) Choosing unit cells in a lattice Unit cell shape must be: 2-D - parallelogram (4 sides) 3-D - parallelepiped (6 faces) Not a unit cell: Choosing unit cells in a lattice Unit cell shape must be: 2-D - parallelogram (4 sides) 3-D - parallelepiped (6 faces) Not a unit cell: correct cell Stereographic projections Show or represent 3-D object in 2-D Procedure: 1. -

Cross Product Review
12.4 Cross Product Review: The dot product of uuuu123, , and v vvv 123, , is u v uvuvuv 112233 uv u u u u v u v cos or cos uv u and v are orthogonal if and only if u v 0 u uv uv compvu projvuv v v vv projvu cross product u v uv23 uv 32 i uv 13 uv 31 j uv 12 uv 21 k u v is orthogonal to both u and v. u v u v sin Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! • u x v is perpendicular to u and v • The length of u x v is u v u v sin • The direction is given by the right hand side rule Right hand rule Place your 4 fingers in the direction of the first vector, curl them in the direction of the second vector, Your thumb will point in the direction of the cross product Algebraic description of the cross product of the vectors u and v The cross product of uu1, u 2 , u 3 and v v 1, v 2 , v 3 is uv uv23 uvuv 3231,, uvuv 1312 uv 21 check (u v ) u 0 and ( u v ) v 0 (u v ) u uv23 uvuv 3231 , uvuv 1312 , uv 21 uuu 123 , , uvu231 uvu 321 uvu 312 uvu 132 uvu 123 uvu 213 0 similary: (u v ) v 0 length u v u v sin is a little messier : 2 2 2 2 2 2 2 2uv 2 2 2 uvuv sin22 uv 1 cos uv 1 uvuv 22 uv now need to show that u v2 u 2 v 2 u v2 (try it..) An easier way to remember the formula for the cross products is in terms of determinants: ab 12 2x2 determinant: ad bc 4 6 2 cd 34 3x3 determinants: An example Copy 1st 2 columns 1 6 2 sum of sum of 1 6 2 1 6 forward backward 3 1 3 3 1 3 3 1 diagonal diagonal 4 5 2 4 5 2 4 5 products products determinant = 2 72 30 8 15 36 40 59 19 recall: uv uv23 uvuv 3231, uvuv 1312 , uv 21 i j k i j k i j u1 u 2 u 3 u 1 u 2 now we claim that uvu1 u 2 u 3 v1 v 2 v 3 v 1 v 2 v1 v 2 v 3 iuv23 j uv 31 k uv 12 k uv 21 i uv 32 j uv 13 u v uv23 uv 32 i uv 13 uv 31 j uv 12 uv 21 k uv uv23 uvuv 3231,, uvuv 1312 uv 21 Example: Let u1, 2,1 and v 3,1, 2 Find u v. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -

Crystal Structure
Physics 927 E.Y.Tsymbal Section 1: Crystal Structure A solid is said to be a crystal if atoms are arranged in such a way that their positions are exactly periodic. This concept is illustrated in Fig.1 using a two-dimensional (2D) structure. y T C Fig.1 A B a x 1 A perfect crystal maintains this periodicity in both the x and y directions from -∞ to +∞. As follows from this periodicity, the atoms A, B, C, etc. are equivalent. In other words, for an observer located at any of these atomic sites, the crystal appears exactly the same. The same idea can be expressed by saying that a crystal possesses a translational symmetry. The translational symmetry means that if the crystal is translated by any vector joining two atoms, say T in Fig.1, the crystal appears exactly the same as it did before the translation. In other words the crystal remains invariant under any such translation. The structure of all crystals can be described in terms of a lattice, with a group of atoms attached to every lattice point. For example, in the case of structure shown in Fig.1, if we replace each atom by a geometrical point located at the equilibrium position of that atom, we obtain a crystal lattice. The crystal lattice has the same geometrical properties as the crystal, but it is devoid of any physical contents. There are two classes of lattices: the Bravais and the non-Bravais. In a Bravais lattice all lattice points are equivalent and hence by necessity all atoms in the crystal are of the same kind. -

Recitation Video Transcript (PDF)
MITOCW | MIT18_06SC_110609_L4_300k-mp4 LINAN CHEN: Hello. Welcome back to recitation. I'm sure you are becoming more and more familiar with the determinants of matrices. In the lecture, we also learned the geometric interpretation of the determinant. The absolute value of the determinant of a matrix is simply equal to the volume of the parallelepiped spanned by the row vectors of that matrix. So today, we're going to apply this fact to solve the following problem. I have a tetrahedron, T, in this 3D space. And the vertices of T are given by O, which is the origin, A_1, A_2, and A_3. So I have highlighted this tetrahedron using the blue chalk. So this is T. And our first goal is to compute the volume of T using the determinant. And the second part is: if I fix A_1 and A_2, but move A_3 to another point, A_3 prime, which is given by this coordinate, I ask you to compute the volume again. OK. So since we want to use the fact that the determinant is related to the volume, we have to figure out which volume we should be looking at. We know that the determinant is related to the volume of a parallelepiped. But here, we only have a tetrahedron. So the first goal should be to find out which parallelepiped you should be working with. OK, why don't you hit pause and try to work it out yourself. You can sketch the parallelepiped on this picture. And I will return in a while and continue working with you. -

The Corpuscle a Simple Building Block for Polyhedral Networks
THE CORPUSCLE - A SIMPLE BUILDING BLOCK FOR POLYHEDRAL NETWORKS Eva WOHLLEBEN1 and Wolfram LIEBERMEISTER2 1Kunsthochschule Berlin Weiûensee, Germany 2Max Planck Institute for Molecular Genetics, Germany ABSTRACT: The corpuscle is a geometric structure formed by ten regular, but slightly deformable triangles. It allows for building a variety of three-dimensional structures, including the Goldberg icosahedron, infinite chains, closed rings consisting of 8, 12 or 16 subunits, and a cube-like structure comprising 20 subunits. These shapes can be built as paper models, which allow for a slight deformation of the triangles. In general, such deformations are necessary to obtain rings and other closed structures. Some of the structures are flexible, i.e. their geometric shape can be varied continuously with no or little distortion of the surface triangles. We distinguish between mathematical flexibility (where we require exactly regular triangle faces) and approximate, physical deformability (where edge lengths can be slightly distorted). Flexibility appears, for instance, in corpuscle chains: movements of a single element lead to collective conformations change along the chain, the so-called breathing. The resulting conformations of individual subunits repeat each other, approximately, after three units. Owing to this approximate periodicity, rings built from 8 or 16 corpuscles are rigid, while the 12-ring can be deformed quite easily, which is confirmed by the paper models. Three-dimensional corpuscle networks can be constructed by arranging regular or truncated octahedra in periodic patterns and decorating them with corpuscle balls. Keywords: Corpuscle, Goldberg icosahedron, regular triangle, multi-stable polyhedron, periodic structure, flexible geometric body 1. INTRODUCTION All these structures are bounded by regular - or possibly slightly distorted - triangles. -
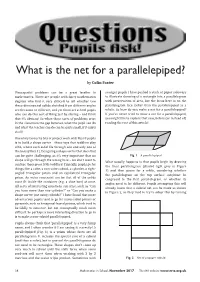
What Is the Net for a Parallelepiped?
What is the net for a parallelepiped? by Colin Foster Visuospatial problems can be a great leveller in younger pupils I have pushed a stack of paper sideways mathematics. There are people with fancy mathematics to illustrate shearing of a rectangle into a parallelogram with preservation of area, but the focus here is on the three-dimensional solids sketched from different angles parallelogram face rather than the parallelepiped as a aredegrees the same who orfind different, it very and difficult yet there to tellare whetherschool pupils two whole. So how do you make a net for a parallelepiped? who can do this sort of thing just by staring – and think If you’ve never tried to draw a net for a parallelepiped, that it’s obvious! So when these sorts of problems arise you might like to explore that now, before (or instead of) in the classroom the gap between what the pupil can do reading the rest of this article! and what the teacher can do can be quite small, if it exists at all! One of my favourite bits of project work with Year 8 pupils is to build a shape sorter – those toys that toddlers play the holes (Note 1). Designing a shape sorter that does that canwith, be where quite eachchallenging, solid fits as through it’s very one important and only that one noof Fig. 1 shape will go through the wrong hole – we don’t want to What usually happens A is parallelepipedthat pupils begin by drawing confuse those poor little toddlers! Typically, pupils go for the front parallelogram (shaded light grey in Figure things like a cube, a non-cube cuboid, a cylinder, a right- 1) and then pause for a while, wondering whether angled triangular prism and an equilateral triangular the parallelogram on the top surface can/must be prism. -

Lattice Points, Polyhedra, and Complexity
Lattice Points, Polyhedra, and Complexity Alexander Barvinok IAS/Park City Mathematics Series Volume , 2004 Lattice Points, Polyhedra, and Complexity Alexander Barvinok Introduction The central topic of these lectures is efficient counting of integer points in poly- hedra. Consequently, various structural results about polyhedra and integer points are ultimately discussed with an eye on computational complexity and algorithms. This approach is one of many possible and it suggests some new analogies and connections. For example, we consider unimodular decompositions of cones as a higher-dimensional generalization of the classical construction of continued frac- tions. There is a well recognized difference between the theoretical computational complexity of an algorithm and the performance of a computational procedure in practice. Recent computational advances [L+04], [V+04] demonstrate that many of the theoretical ideas described in these notes indeed work fine in practice. On the other hand, some other theoretically efficient algorithms look completely “unimple- mentable”, a good example is given by some algorithms of [BW03]. Moreover, there are problems for which theoretically efficient algorithms are not available at the time. In our view, this indicates the current lack of understanding of some important structural issues in the theory of lattice points and polyhedra. It shows that the theory is very much alive and open for explorations. Exercises constitute an important part of these notes. They are assembled at the end of each lecture and classified as review problems, supplementary problems, and preview problems. Review problems ask the reader to complete a proof, to fill some gaps in a proof, or to establish some necessary technical prerequisites. -

7 Space Fillers
7 Space Fillers Themes Space filling, translation, geometric properties. Vocabulary Rhombus, coplanar, parallel, parallelogram, tessellation, translation, parallelepiped, space filling. Synopsis Construct parallelepipeds from rhombi. See how they stack. Construct a parallelepiped from an octahedron and two tetrahedra. Use this to see how tetrahedra and octahedra together can fill space. Overall structure Previous Extension 1 Use, Safety and the Rhombus X 2 Strips and Tunnels 3 Pyramids X 4 Regular Polyhedra X 5 Symmetry X 6 Colour Patterns 7 Space Fillers 8 Double edge length tetrahedron X 9 Stella Octangula X 10 Stellated Polyhedra and Duality X 11 Faces and Edges 12 Angle Deficit 13 Torus Layout The activity description is in this font, with possible speech or actions as follows: Suggested instructor speech is shown here with possible student responses shown here. 'Alternative responses are shown in quotation marks’. 1 Parallelepipeds from Rhombi Have the students make rhombi by tying together pairs of triangles. You need 6 rhombi, two the first colour, two a second colour and another two a third colour. Lay them out as shown in figure 1 to form a net in two parts. Figure 1 The net in two parts not tied together (notice how the colours are vary in each part of the net) At this point you can have some students tie the adjacent triangles together while other students make more rhombi in sets of six, with three pairs of rhombi, each pair of rhombi a distinct colour. They can then copy the layout of nets in two parts. Emphasize in your instructions: What do you notice about how the colours are laid out in the two parts of the net? The colours are different, here the blue is on this side, but there it is on the other side.