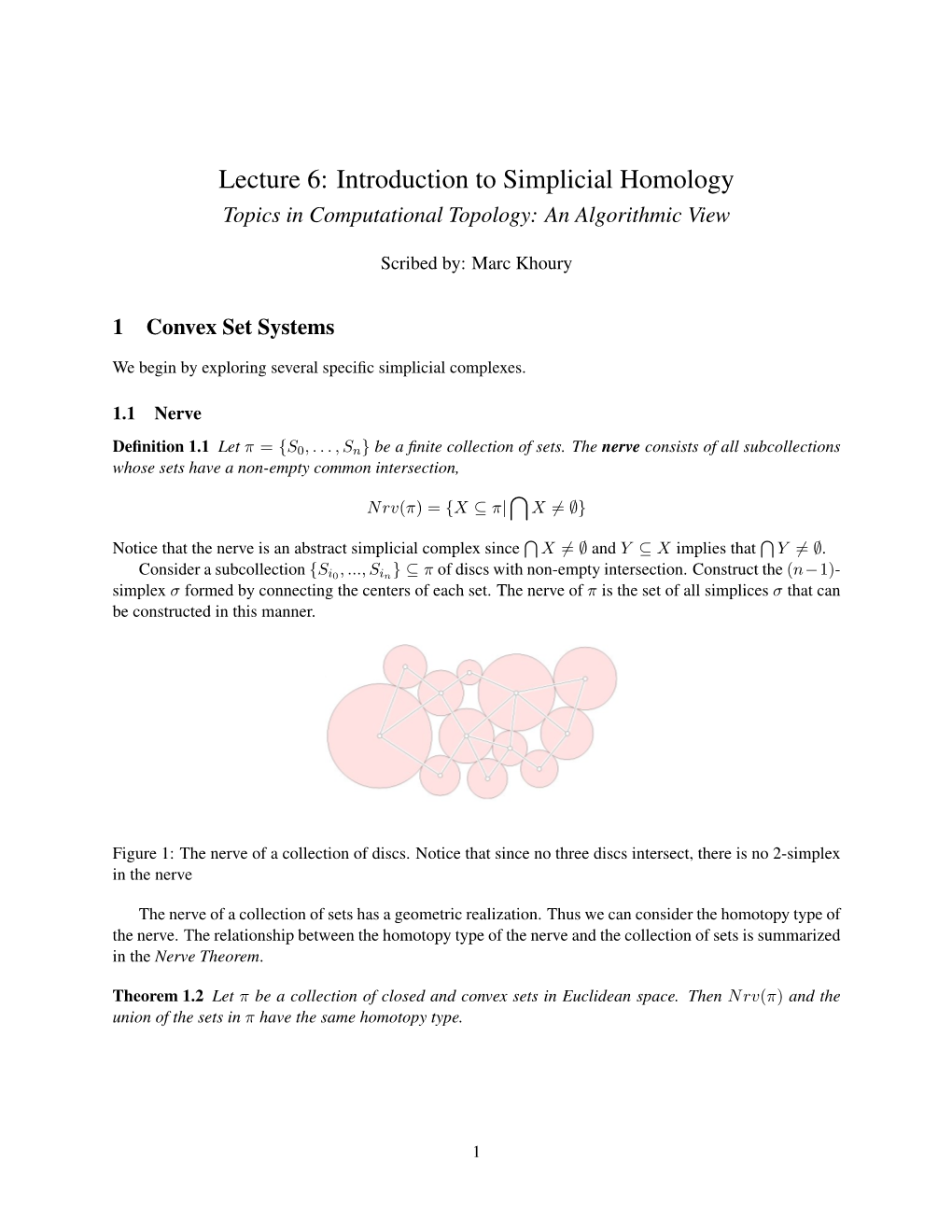
Lecture 6: Introduction to Simplicial Homology Topics in Computational Topology: an Algorithmic View
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Co-Occurrence Simplicial Complexes in Mathematics: Identifying the Holes of Knowledge Arxiv:1803.04410V1 [Physics.Soc-Ph] 11 M](https://docslib.b-cdn.net/cover/2984/co-occurrence-simplicial-complexes-in-mathematics-identifying-the-holes-of-knowledge-arxiv-1803-04410v1-physics-soc-ph-11-m-112984.webp)
Co-Occurrence Simplicial Complexes in Mathematics: Identifying the Holes of Knowledge Arxiv:1803.04410V1 [Physics.Soc-Ph] 11 M
Co-occurrence simplicial complexes in mathematics: identifying the holes of knowledge Vsevolod Salnikov∗, NaXys, Universit´ede Namur, 5000 Namur, Belgium ∗Corresponding author: [email protected] Daniele Cassese NaXys, Universit´ede Namur, 5000 Namur, Belgium ICTEAM, Universit´eCatholique de Louvain, 1348 Louvain-la-Neuve, Belgium Mathematical Institute, University of Oxford, OX2 6GG Oxford, UK [email protected] Renaud Lambiotte Mathematical Institute, University of Oxford, OX2 6GG Oxford, UK [email protected] and Nick S. Jones Department of Mathematics, Imperial College, SW7 2AZ London, UK [email protected] Abstract In the last years complex networks tools contributed to provide insights on the structure of research, through the study of collaboration, citation and co-occurrence networks. The network approach focuses on pairwise relationships, often compressing multidimensional data structures and inevitably losing information. In this paper we propose for the first time a simplicial complex approach to word co-occurrences, providing a natural framework for the study of higher-order relations in the space of scientific knowledge. Using topological meth- ods we explore the conceptual landscape of mathematical research, focusing on homological holes, regions with low connectivity in the simplicial structure. We find that homological holes are ubiquitous, which suggests that they capture some essential feature of research arXiv:1803.04410v1 [physics.soc-ph] 11 Mar 2018 practice in mathematics. Holes die when a subset of their concepts appear in the same ar- ticle, hence their death may be a sign of the creation of new knowledge, as we show with some examples. We find a positive relation between the dimension of a hole and the time it takes to be closed: larger holes may represent potential for important advances in the field because they separate conceptually distant areas. -

Simplicial Complexes
46 III Complexes III.1 Simplicial Complexes There are many ways to represent a topological space, one being a collection of simplices that are glued to each other in a structured manner. Such a collection can easily grow large but all its elements are simple. This is not so convenient for hand-calculations but close to ideal for computer implementations. In this book, we use simplicial complexes as the primary representation of topology. Rd k Simplices. Let u0; u1; : : : ; uk be points in . A point x = i=0 λiui is an affine combination of the ui if the λi sum to 1. The affine hull is the set of affine combinations. It is a k-plane if the k + 1 points are affinely Pindependent by which we mean that any two affine combinations, x = λiui and y = µiui, are the same iff λi = µi for all i. The k + 1 points are affinely independent iff P d P the k vectors ui − u0, for 1 ≤ i ≤ k, are linearly independent. In R we can have at most d linearly independent vectors and therefore at most d+1 affinely independent points. An affine combination x = λiui is a convex combination if all λi are non- negative. The convex hull is the set of convex combinations. A k-simplex is the P convex hull of k + 1 affinely independent points, σ = conv fu0; u1; : : : ; ukg. We sometimes say the ui span σ. Its dimension is dim σ = k. We use special names of the first few dimensions, vertex for 0-simplex, edge for 1-simplex, triangle for 2-simplex, and tetrahedron for 3-simplex; see Figure III.1. -

The Boundary Manifold of a Complex Line Arrangement
Geometry & Topology Monographs 13 (2008) 105–146 105 The boundary manifold of a complex line arrangement DANIEL CCOHEN ALEXANDER ISUCIU We study the topology of the boundary manifold of a line arrangement in CP2 , with emphasis on the fundamental group G and associated invariants. We determine the Alexander polynomial .G/, and more generally, the twisted Alexander polynomial associated to the abelianization of G and an arbitrary complex representation. We give an explicit description of the unit ball in the Alexander norm, and use it to analyze certain Bieri–Neumann–Strebel invariants of G . From the Alexander polynomial, we also obtain a complete description of the first characteristic variety of G . Comparing this with the corresponding resonance variety of the cohomology ring of G enables us to characterize those arrangements for which the boundary manifold is formal. 32S22; 57M27 For Fred Cohen on the occasion of his sixtieth birthday 1 Introduction 1.1 The boundary manifold Let A be an arrangement of hyperplanes in the complex projective space CPm , m > 1. Denote by V S H the corresponding hypersurface, and by X CPm V its D H A D n complement. Among2 the origins of the topological study of arrangements are seminal results of Arnol’d[2] and Cohen[8], who independently computed the cohomology of the configuration space of n ordered points in C, the complement of the braid arrangement. The cohomology ring of the complement of an arbitrary arrangement A is by now well known. It is isomorphic to the Orlik–Solomon algebra of A, see Orlik and Terao[34] as a general reference. -

Lecture 15. De Rham Cohomology
Lecture 15. de Rham cohomology In this lecture we will show how differential forms can be used to define topo- logical invariants of manifolds. This is closely related to other constructions in algebraic topology such as simplicial homology and cohomology, singular homology and cohomology, and Cechˇ cohomology. 15.1 Cocycles and coboundaries Let us first note some applications of Stokes’ theorem: Let ω be a k-form on a differentiable manifold M.For any oriented k-dimensional compact sub- manifold Σ of M, this gives us a real number by integration: " ω : Σ → ω. Σ (Here we really mean the integral over Σ of the form obtained by pulling back ω under the inclusion map). Now suppose we have two such submanifolds, Σ0 and Σ1, which are (smoothly) homotopic. That is, we have a smooth map F : Σ × [0, 1] → M with F |Σ×{i} an immersion describing Σi for i =0, 1. Then d(F∗ω)isa (k + 1)-form on the (k + 1)-dimensional oriented manifold with boundary Σ × [0, 1], and Stokes’ theorem gives " " " d(F∗ω)= ω − ω. Σ×[0,1] Σ1 Σ1 In particular, if dω =0,then d(F∗ω)=F∗(dω)=0, and we deduce that ω = ω. Σ1 Σ0 This says that k-forms with exterior derivative zero give a well-defined functional on homotopy classes of compact oriented k-dimensional submani- folds of M. We know some examples of k-forms with exterior derivative zero, namely those of the form ω = dη for some (k − 1)-form η. But Stokes’ theorem then gives that Σ ω = Σ dη =0,sointhese cases the functional we defined on homotopy classes of submanifolds is trivial. -

Homological Mirror Symmetry for the Genus 2 Curve in an Abelian Variety and Its Generalized Strominger-Yau-Zaslow Mirror by Cath
Homological mirror symmetry for the genus 2 curve in an abelian variety and its generalized Strominger-Yau-Zaslow mirror by Catherine Kendall Asaro Cannizzo A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Mathematics in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Denis Auroux, Chair Professor David Nadler Professor Marjorie Shapiro Spring 2019 Homological mirror symmetry for the genus 2 curve in an abelian variety and its generalized Strominger-Yau-Zaslow mirror Copyright 2019 by Catherine Kendall Asaro Cannizzo 1 Abstract Homological mirror symmetry for the genus 2 curve in an abelian variety and its generalized Strominger-Yau-Zaslow mirror by Catherine Kendall Asaro Cannizzo Doctor of Philosophy in Mathematics University of California, Berkeley Professor Denis Auroux, Chair Motivated by observations in physics, mirror symmetry is the concept that certain mani- folds come in pairs X and Y such that the complex geometry on X mirrors the symplectic geometry on Y . It allows one to deduce information about Y from known properties of X. Strominger-Yau-Zaslow (1996) described how such pairs arise geometrically as torus fibra- tions with the same base and related fibers, known as SYZ mirror symmetry. Kontsevich (1994) conjectured that a complex invariant on X (the bounded derived category of coherent sheaves) should be equivalent to a symplectic invariant of Y (the Fukaya category). This is known as homological mirror symmetry. In this project, we first use the construction of SYZ mirrors for hypersurfaces in abelian varieties following Abouzaid-Auroux-Katzarkov, in order to obtain X and Y as manifolds. -

Graph Manifolds and Taut Foliations Mark Brittenham1, Ramin Naimi, and Rachel Roberts2 Introduction
Graph manifolds and taut foliations 1 2 Mark Brittenham , Ramin Naimi, and Rachel Roberts UniversityofTexas at Austin Abstract. We examine the existence of foliations without Reeb comp onents, taut 1 1 foliations, and foliations with no S S -leaves, among graph manifolds. We show that each condition is strictly stronger than its predecessors, in the strongest p os- sible sense; there are manifolds admitting foliations of eachtyp e which do not admit foliations of the succeeding typ es. x0 Introduction Taut foliations have b een increasingly useful in understanding the top ology of 3-manifolds, thanks largely to the work of David Gabai [Ga1]. Many 3-manifolds admit taut foliations [Ro1],[De],[Na1], although some do not [Br1],[Cl]. To date, however, there are no adequate necessary or sucient conditions for a manifold to admit a taut foliation. This pap er seeks to add to this confusion. In this pap er we study the existence of taut foliations and various re nements, among graph manifolds. What we show is that there are many graph manifolds which admit foliations that are as re ned as wecho ose, but which do not admit foliations admitting any further re nements. For example, we nd manifolds which admit foliations without Reeb comp onents, but no taut foliations. We also nd 0 manifolds admitting C foliations with no compact leaves, but which do not admit 2 any C such foliations. These results p oint to the subtle nature b ehind b oth top ological and analytical assumptions when dealing with foliations. A principal motivation for this work came from a particularly interesting exam- ple; the manifold M obtained by 37/2 Dehn surgery on the 2,3,7 pretzel knot K . -

Some Notes About Simplicial Complexes and Homology II
Some notes about simplicial complexes and homology II J´onathanHeras J. Heras Some notes about simplicial homology II 1/19 Table of Contents 1 Simplicial Complexes 2 Chain Complexes 3 Differential matrices 4 Computing homology groups from Smith Normal Form J. Heras Some notes about simplicial homology II 2/19 Simplicial Complexes Table of Contents 1 Simplicial Complexes 2 Chain Complexes 3 Differential matrices 4 Computing homology groups from Smith Normal Form J. Heras Some notes about simplicial homology II 3/19 Simplicial Complexes Simplicial Complexes Definition Let V be an ordered set, called the vertex set. A simplex over V is any finite subset of V . Definition Let α and β be simplices over V , we say α is a face of β if α is a subset of β. Definition An ordered (abstract) simplicial complex over V is a set of simplices K over V satisfying the property: 8α 2 K; if β ⊆ α ) β 2 K Let K be a simplicial complex. Then the set Sn(K) of n-simplices of K is the set made of the simplices of cardinality n + 1. J. Heras Some notes about simplicial homology II 4/19 Simplicial Complexes Simplicial Complexes 2 5 3 4 0 6 1 V = (0; 1; 2; 3; 4; 5; 6) K = f;; (0); (1); (2); (3); (4); (5); (6); (0; 1); (0; 2); (0; 3); (1; 2); (1; 3); (2; 3); (3; 4); (4; 5); (4; 6); (5; 6); (0; 1; 2); (4; 5; 6)g J. Heras Some notes about simplicial homology II 5/19 Chain Complexes Table of Contents 1 Simplicial Complexes 2 Chain Complexes 3 Differential matrices 4 Computing homology groups from Smith Normal Form J. -

Operations on Metric Thickenings
Operations on Metric Thickenings Henry Adams Johnathan Bush Joshua Mirth Colorado State University Colorado, USA [email protected] Many simplicial complexes arising in practice have an associated metric space structure on the vertex set but not on the complex, e.g. the Vietoris–Rips complex in applied topology. We formalize a remedy by introducing a category of simplicial metric thickenings whose objects have a natural realization as metric spaces. The properties of this category allow us to prove that, for a large class of thickenings including Vietoris–Rips and Cechˇ thickenings, the product of metric thickenings is homotopy equivalent to the metric thickenings of product spaces, and similarly for wedge sums. 1 Introduction Applied topology studies geometric complexes such as the Vietoris–Rips and Cechˇ simplicial complexes. These are constructed out of metric spaces by combining nearby points into simplices. We observe that proofs of statements related to the topology of Vietoris–Rips and Cechˇ simplicial complexes often contain a considerable amount of overlap, even between the different conventions within each case (for example, ≤ versus <). We attempt to abstract away from the particularities of these constructions and consider instead a type of simplicial metric thickening object. Along these lines, we give a natural categorical setting for so-called simplicial metric thickenings [3]. In Sections 2 and 3, we provide motivation and briefly summarize related work. Then, in Section 4, we introduce the definition of our main objects of study: the category MetTh of simplicial metric thick- m enings and the associated metric realization functor from MetTh to the category of metric spaces. -

Fixed Point Theory
Andrzej Granas James Dugundji Fixed Point Theory With 14 Illustrations %1 Springer Contents Preface vii §0. Introduction 1 1. Fixed Point Spaces 1 2. Forming New Fixed Point Spaces from Old 3 3. Topological Transversality 4 4. Factorization Technique 6 I. Elementary Fixed Point Theorems §1. Results Based on Completeness 9 1. Banach Contraction Principle 9 2. Elementary Domain Invariance 11 3. Continuation Method for Contractive Maps 12 4. Nonlinear Alternative for Contractive Maps 13 5. Extensions of the Banach Theorem 15 6. Miscellaneous Results and Examples 17 7. Notes and Comments 23 §2. Order-Theoretic Results 25 1. The Knaster-Tarski Theorem 25 2. Order and Completeness. Theorem of Bishop-Phelps 26 3. Fixed Points for Set-Valued Contractive Maps 28 4. Applications to Geometry of Banach Spaces 29 5. Applications to the Theory of Critical Points 30 6. Miscellaneous Results and Examples 31 7. Notes and Comments 34 X Contents §3. Results Based on Convexity 37 1. KKM-Maps and the Geometric KKM-Principle 37 2. Theorem of von Neumann and Systems of Inequalities 40 3. Fixed Points of Affine Maps. Markoff-Kakutani Theorem 42 4. Fixed Points for Families of Maps. Theorem of Kakutani 44 5. Miscellaneous Results and Examples 46 6. Notes and Comments 48 §4. Further Results and Applications 51 1. Nonexpansive Maps in Hilbert Space 51 2. Applications of the Banach Principle to Integral and Differential Equations 55 3. Applications of the Elementary Domain Invariance 57 4. Elementary KKM-Principle and its Applications 64 5. Theorems of Mazur-Orlicz and Hahn-Banach 70 6. -

A TEXTBOOK of TOPOLOGY Lltld
SEIFERT AND THRELFALL: A TEXTBOOK OF TOPOLOGY lltld SEI FER T: 7'0PO 1.OG 1' 0 I.' 3- Dl M E N SI 0 N A I. FIRERED SPACES This is a volume in PURE AND APPLIED MATHEMATICS A Series of Monographs and Textbooks Editors: SAMUELEILENBERG AND HYMANBASS A list of recent titles in this series appears at the end of this volunie. SEIFERT AND THRELFALL: A TEXTBOOK OF TOPOLOGY H. SEIFERT and W. THRELFALL Translated by Michael A. Goldman und S E I FE R T: TOPOLOGY OF 3-DIMENSIONAL FIBERED SPACES H. SEIFERT Translated by Wolfgang Heil Edited by Joan S. Birman and Julian Eisner @ 1980 ACADEMIC PRESS A Subsidiary of Harcourr Brace Jovanovich, Publishers NEW YORK LONDON TORONTO SYDNEY SAN FRANCISCO COPYRIGHT@ 1980, BY ACADEMICPRESS, INC. ALL RIGHTS RESERVED. NO PART OF THIS PUBLICATION MAY BE REPRODUCED OR TRANSMITTED IN ANY FORM OR BY ANY MEANS, ELECTRONIC OR MECHANICAL, INCLUDING PHOTOCOPY, RECORDING, OR ANY INFORMATION STORAGE AND RETRIEVAL SYSTEM, WITHOUT PERMISSION IN WRITING FROM THE PUBLISHER. ACADEMIC PRESS, INC. 11 1 Fifth Avenue, New York. New York 10003 United Kingdom Edition published by ACADEMIC PRESS, INC. (LONDON) LTD. 24/28 Oval Road, London NWI 7DX Mit Genehmigung des Verlager B. G. Teubner, Stuttgart, veranstaltete, akin autorisierte englische Ubersetzung, der deutschen Originalausgdbe. Library of Congress Cataloging in Publication Data Seifert, Herbert, 1897- Seifert and Threlfall: A textbook of topology. Seifert: Topology of 3-dimensional fibered spaces. (Pure and applied mathematics, a series of mono- graphs and textbooks ; ) Translation of Lehrbuch der Topologic. Bibliography: p. Includes index. 1. -

General Topology
General Topology Tom Leinster 2014{15 Contents A Topological spaces2 A1 Review of metric spaces.......................2 A2 The definition of topological space.................8 A3 Metrics versus topologies....................... 13 A4 Continuous maps........................... 17 A5 When are two spaces homeomorphic?................ 22 A6 Topological properties........................ 26 A7 Bases................................. 28 A8 Closure and interior......................... 31 A9 Subspaces (new spaces from old, 1)................. 35 A10 Products (new spaces from old, 2)................. 39 A11 Quotients (new spaces from old, 3)................. 43 A12 Review of ChapterA......................... 48 B Compactness 51 B1 The definition of compactness.................... 51 B2 Closed bounded intervals are compact............... 55 B3 Compactness and subspaces..................... 56 B4 Compactness and products..................... 58 B5 The compact subsets of Rn ..................... 59 B6 Compactness and quotients (and images)............. 61 B7 Compact metric spaces........................ 64 C Connectedness 68 C1 The definition of connectedness................... 68 C2 Connected subsets of the real line.................. 72 C3 Path-connectedness.......................... 76 C4 Connected-components and path-components........... 80 1 Chapter A Topological spaces A1 Review of metric spaces For the lecture of Thursday, 18 September 2014 Almost everything in this section should have been covered in Honours Analysis, with the possible exception of some of the examples. For that reason, this lecture is longer than usual. Definition A1.1 Let X be a set. A metric on X is a function d: X × X ! [0; 1) with the following three properties: • d(x; y) = 0 () x = y, for x; y 2 X; • d(x; y) + d(y; z) ≥ d(x; z) for all x; y; z 2 X (triangle inequality); • d(x; y) = d(y; x) for all x; y 2 X (symmetry). -

Local Homology of Abstract Simplicial Complexes
Local homology of abstract simplicial complexes Michael Robinson Chris Capraro Cliff Joslyn Emilie Purvine Brenda Praggastis Stephen Ranshous Arun Sathanur May 30, 2018 Abstract This survey describes some useful properties of the local homology of abstract simplicial complexes. Although the existing literature on local homology is somewhat dispersed, it is largely dedicated to the study of manifolds, submanifolds, or samplings thereof. While this is a vital per- spective, the focus of this survey is squarely on the local homology of abstract simplicial complexes. Our motivation comes from the needs of the analysis of hypergraphs and graphs. In addition to presenting many classical facts in a unified way, this survey presents a few new results about how local homology generalizes useful tools from graph theory. The survey ends with a statistical comparison of graph invariants with local homology. Contents 1 Introduction 2 2 Historical discussion 4 3 Theoretical groundwork 6 3.1 Representing data with simplicial complexes . .7 3.2 Relative simplicial homology . .8 3.3 Local homology . .9 arXiv:1805.11547v1 [math.AT] 29 May 2018 4 Local homology of graphs 12 4.1 Basic graph definitions . 14 4.2 Local homology at a vertex . 15 5 Local homology of general complexes 18 5.1 Stratification detection . 19 5.2 Neighborhood filtration . 24 6 Computational considerations 25 1 7 Statistical comparison with graph invariants 26 7.1 Graph invariants used in our comparison . 27 7.2 Comparison methodology . 27 7.3 Dataset description . 28 7.4 The Karate graph . 28 7.5 The Erd}os-R´enyi graph . 30 7.6 The Barabasi-Albert graph .