Physics, Chapter 2: Motion of a Particle (Kinematics)
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Two-Dimensional Rotational Kinematics Rigid Bodies
Rigid Bodies A rigid body is an extended object in which the Two-Dimensional Rotational distance between any two points in the object is Kinematics constant in time. Springs or human bodies are non-rigid bodies. 8.01 W10D1 Rotation and Translation Recall: Translational Motion of of Rigid Body the Center of Mass Demonstration: Motion of a thrown baton • Total momentum of system of particles sys total pV= m cm • External force and acceleration of center of mass Translational motion: external force of gravity acts on center of mass sys totaldp totaldVcm total FAext==mm = cm Rotational Motion: object rotates about center of dt dt mass 1 Main Idea: Rotation of Rigid Two-Dimensional Rotation Body Torque produces angular acceleration about center of • Fixed axis rotation: mass Disc is rotating about axis τ total = I α passing through the cm cm cm center of the disc and is perpendicular to the I plane of the disc. cm is the moment of inertial about the center of mass • Plane of motion is fixed: α is the angular acceleration about center of mass cm For straight line motion, bicycle wheel rotates about fixed direction and center of mass is translating Rotational Kinematics Fixed Axis Rotation: Angular for Fixed Axis Rotation Velocity Angle variable θ A point like particle undergoing circular motion at a non-constant speed has SI unit: [rad] dθ ω ≡≡ω kkˆˆ (1)An angular velocity vector Angular velocity dt SI unit: −1 ⎣⎡rad⋅ s ⎦⎤ (2) an angular acceleration vector dθ Vector: ω ≡ Component dt dθ ω ≡ magnitude dt ω >+0, direction kˆ direction ω < 0, direction − kˆ 2 Fixed Axis Rotation: Angular Concept Question: Angular Acceleration Speed 2 ˆˆd θ Object A sits at the outer edge (rim) of a merry-go-round, and Angular acceleration: α ≡≡α kk2 object B sits halfway between the rim and the axis of rotation. -

Electric Units and Standards
DEPARTMENT OF COMMERCE OF THE Bureau of Standards S. W. STRATTON, Director No. 60 ELECTRIC UNITS AND STANDARDS list Edition 1 Issued September 25. 1916 WASHINGTON GOVERNMENT PRINTING OFFICE DEPARTMENT OF COMMERCE Circular OF THE Bureau of Standards S. W. STRATTON, Director No. 60 ELECTRIC UNITS AND STANDARDS [1st Edition] Issued September 25, 1916 WASHINGTON GOVERNMENT PRINTING OFFICE 1916 ADDITIONAL COPIES OF THIS PUBLICATION MAY BE PROCURED FROM THE SUPERINTENDENT OF DOCUMENTS GOVERNMENT PRINTING OFFICE WASHINGTON, D. C. AT 15 CENTS PER COPY A complete list of the Bureau’s publications may be obtained free of charge on application to the Bureau of Standards, Washington, D. C. ELECTRIC UNITS AND STANDARDS CONTENTS Page I. The systems of units 4 1. Units and standards in general 4 2. The electrostatic and electromagnetic systems 8 () The numerically different systems of units 12 () Gaussian systems, and ratios of the units 13 “ ’ (c) Practical ’ electromagnetic units 15 3. The international electric units 16 II. Evolution of present system of concrete standards 18 1. Early electric standards 18 2. Basis of present laws 22 3. Progress since 1893 24 III. Units and standards of the principal electric quantities 29 1. Resistance 29 () International ohm 29 Definition 29 Mercury standards 30 Secondary standards 31 () Resistance standards in practice 31 (c) Absolute ohm 32 2. Current 33 (a) International ampere 33 Definition 34 The silver voltameter 35 ( b ) Resistance standards used in current measurement 36 (c) Absolute ampere 37 3. Electromotive force 38 (a) International volt 38 Definition 39 Weston normal cell 39 (b) Portable Weston cells 41 (c) Absolute and semiabsolute volt 42 4. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -
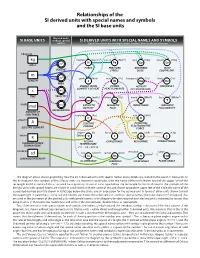
Relationships of the SI Derived Units with Special Names and Symbols and the SI Base Units
Relationships of the SI derived units with special names and symbols and the SI base units Derived units SI BASE UNITS without special SI DERIVED UNITS WITH SPECIAL NAMES AND SYMBOLS names Solid lines indicate multiplication, broken lines indicate division kilogram kg newton (kg·m/s2) pascal (N/m2) gray (J/kg) sievert (J/kg) 3 N Pa Gy Sv MASS m FORCE PRESSURE, ABSORBED DOSE VOLUME STRESS DOSE EQUIVALENT meter m 2 m joule (N·m) watt (J/s) becquerel (1/s) hertz (1/s) LENGTH J W Bq Hz AREA ENERGY, WORK, POWER, ACTIVITY FREQUENCY second QUANTITY OF HEAT HEAT FLOW RATE (OF A RADIONUCLIDE) s m/s TIME VELOCITY katal (mol/s) weber (V·s) henry (Wb/A) tesla (Wb/m2) kat Wb H T 2 mole m/s CATALYTIC MAGNETIC INDUCTANCE MAGNETIC mol ACTIVITY FLUX FLUX DENSITY ACCELERATION AMOUNT OF SUBSTANCE coulomb (A·s) volt (W/A) C V ampere A ELECTRIC POTENTIAL, CHARGE ELECTROMOTIVE ELECTRIC CURRENT FORCE degree (K) farad (C/V) ohm (V/A) siemens (1/W) kelvin Celsius °C F W S K CELSIUS CAPACITANCE RESISTANCE CONDUCTANCE THERMODYNAMIC TEMPERATURE TEMPERATURE t/°C = T /K – 273.15 candela 2 steradian radian cd lux (lm/m ) lumen (cd·sr) 2 2 (m/m = 1) lx lm sr (m /m = 1) rad LUMINOUS INTENSITY ILLUMINANCE LUMINOUS SOLID ANGLE PLANE ANGLE FLUX The diagram above shows graphically how the 22 SI derived units with special names and symbols are related to the seven SI base units. In the first column, the symbols of the SI base units are shown in rectangles, with the name of the unit shown toward the upper left of the rectangle and the name of the associated base quantity shown in italic type below the rectangle. -

Kinematics, Impulse, and Human Running
Kinematics, Impulse, and Human Running Kinematics, Impulse, and Human Running Purpose This lesson explores how kinematics and impulse can be used to analyze human running performance. Students will explore how scientists determined the physical factors that allow elite runners to travel at speeds far beyond the average jogger. Audience This lesson was designed to be used in an introductory high school physics class. Lesson Objectives Upon completion of this lesson, students will be able to: ஃ describe the relationship between impulse and momentum. ஃ apply impulse-momentum theorem to explain the relationship between the force a runner applies to the ground, the time a runner is in contact with the ground, and a runner’s change in momentum. Key Words aerial phase, contact phase, momentum, impulse, force Big Question This lesson plan addresses the Big Question “What does it mean to observe?” Standard Alignments ஃ Science and Engineering Practices ஃ SP 4. Analyzing and interpreting data ஃ SP 5. Using mathematics and computational thinking ஃ MA Science and Technology/Engineering Standards (2016) ஃ HS-PS2-10(MA). Use algebraic expressions and Newton’s laws of motion to predict changes to velocity and acceleration for an object moving in one dimension in various situations. ஃ HS-PS2-3. Apply scientific principles of motion and momentum to design, evaluate, and refine a device that minimizes the force on a macroscopic object during a collision. ஃ NGSS Standards (2013) HS-PS2-2. Use mathematical representations to support the claim that the total momentum of a system of objects is conserved when there is no net force on the system. -

Kinematics Big Ideas and Equations Position Vs
Kinematics Big Ideas and Equations Position vs. Time graphs Big Ideas: A straight line on a p vs t graph indicates constant speed (and velocity) An object at rest is indicated by a horizontal line The slope of a line on a p vs. t graph = velocity of the object (steeper = faster) The main difference between speed and velocity is that velocity incorporates direction o Speed will always be positive but velocity can be positive or negative o Positive vs. Negative slopes indicates the direction; toward the positive end of an axis (number line) or the negative end. For motion detectors this indicates toward (-) and away (+), but only because there is no negative side to the axis. An object with continuously changing speed will have a curved P vs. t graph; (curving steeper – speeding up, curving flatter – slowing down) (Instantaneous) velocity = average velocity if P vs. t is a (straight) line. Velocity vs Time graphs Big Ideas: The velocity can be found by calculating the slope of a position-time graph Constant velocity on a velocity vs. time graph is indicated with a horizontal line. Changing velocity is indicated by a line that slopes up or down. Speed increases when Velocity graph slopes away from v=0 axis. Speed decreases when velocity graph slopes toward v=0 axis. The velocity is negative if the object is moving toward the negative end of the axis - if the final position is less than the initial position (or for motion detectors if the object moves toward the detector) The slope of a velocity vs. -

The International System of Units (SI)
NAT'L INST. OF STAND & TECH NIST National Institute of Standards and Technology Technology Administration, U.S. Department of Commerce NIST Special Publication 330 2001 Edition The International System of Units (SI) 4. Barry N. Taylor, Editor r A o o L57 330 2oOI rhe National Institute of Standards and Technology was established in 1988 by Congress to "assist industry in the development of technology . needed to improve product quality, to modernize manufacturing processes, to ensure product reliability . and to facilitate rapid commercialization ... of products based on new scientific discoveries." NIST, originally founded as the National Bureau of Standards in 1901, works to strengthen U.S. industry's competitiveness; advance science and engineering; and improve public health, safety, and the environment. One of the agency's basic functions is to develop, maintain, and retain custody of the national standards of measurement, and provide the means and methods for comparing standards used in science, engineering, manufacturing, commerce, industry, and education with the standards adopted or recognized by the Federal Government. As an agency of the U.S. Commerce Department's Technology Administration, NIST conducts basic and applied research in the physical sciences and engineering, and develops measurement techniques, test methods, standards, and related services. The Institute does generic and precompetitive work on new and advanced technologies. NIST's research facilities are located at Gaithersburg, MD 20899, and at Boulder, CO 80303. -

Atomic Weights and Isotopic Abundances*
Pure&App/. Chem., Vol. 64, No. 10, pp. 1535-1543, 1992. Printed in Great Britain. @ 1992 IUPAC INTERNATIONAL UNION OF PURE AND APPLIED CHEMISTRY INORGANIC CHEMISTRY DIVISION COMMISSION ON ATOMIC WEIGHTS AND ISOTOPIC ABUNDANCES* 'ATOMIC WEIGHT' -THE NAME, ITS HISTORY, DEFINITION, AND UNITS Prepared for publication by P. DE BIEVRE' and H. S. PEISER2 'Central Bureau for Nuclear Measurements (CBNM), Commission of the European Communities-JRC, B-2440 Geel, Belgium 2638 Blossom Drive, Rockville, MD 20850, USA *Membership of the Commission for the period 1989-1991 was as follows: J. R. De Laeter (Australia, Chairman); K. G. Heumann (FRG, Secretary); R. C. Barber (Canada, Associate); J. CCsario (France, Titular); T. B. Coplen (USA, Titular); H. J. Dietze (FRG, Associate); J. W. Gramlich (USA, Associate); H. S. Hertz (USA, Associate); H. R. Krouse (Canada, Titular); A. Lamberty (Belgium, Associate); T. J. Murphy (USA, Associate); K. J. R. Rosman (Australia, Titular); M. P. Seyfried (FRG, Associate); M. Shima (Japan, Titular); K. Wade (UK, Associate); P. De Bi&vre(Belgium, National Representative); N. N. Greenwood (UK, National Representative); H. S. Peiser (USA, National Representative); N. K. Rao (India, National Representative). Republication of this report is permitted without the need for formal IUPAC permission on condition that an acknowledgement, with full reference together with IUPAC copyright symbol (01992 IUPAC), is printed. Publication of a translation into another language is subject to the additional condition of prior approval from the relevant IUPAC National Adhering Organization. ’Atomic weight‘: The name, its history, definition, and units Abstract-The widely used term “atomic weight” and its acceptance within the international system for measurements has been the subject of debate. -

Chapter 4 One Dimensional Kinematics
Chapter 4 One Dimensional Kinematics 4.1 Introduction ............................................................................................................. 1 4.2 Position, Time Interval, Displacement .................................................................. 2 4.2.1 Position .............................................................................................................. 2 4.2.2 Time Interval .................................................................................................... 2 4.2.3 Displacement .................................................................................................... 2 4.3 Velocity .................................................................................................................... 3 4.3.1 Average Velocity .............................................................................................. 3 4.3.3 Instantaneous Velocity ..................................................................................... 3 Example 4.1 Determining Velocity from Position .................................................. 4 4.4 Acceleration ............................................................................................................. 5 4.4.1 Average Acceleration ....................................................................................... 5 4.4.2 Instantaneous Acceleration ............................................................................. 6 Example 4.2 Determining Acceleration from Velocity ......................................... -

Rotational Motion and Angular Momentum 317
CHAPTER 10 | ROTATIONAL MOTION AND ANGULAR MOMENTUM 317 10 ROTATIONAL MOTION AND ANGULAR MOMENTUM Figure 10.1 The mention of a tornado conjures up images of raw destructive power. Tornadoes blow houses away as if they were made of paper and have been known to pierce tree trunks with pieces of straw. They descend from clouds in funnel-like shapes that spin violently, particularly at the bottom where they are most narrow, producing winds as high as 500 km/h. (credit: Daphne Zaras, U.S. National Oceanic and Atmospheric Administration) Learning Objectives 10.1. Angular Acceleration • Describe uniform circular motion. • Explain non-uniform circular motion. • Calculate angular acceleration of an object. • Observe the link between linear and angular acceleration. 10.2. Kinematics of Rotational Motion • Observe the kinematics of rotational motion. • Derive rotational kinematic equations. • Evaluate problem solving strategies for rotational kinematics. 10.3. Dynamics of Rotational Motion: Rotational Inertia • Understand the relationship between force, mass and acceleration. • Study the turning effect of force. • Study the analogy between force and torque, mass and moment of inertia, and linear acceleration and angular acceleration. 10.4. Rotational Kinetic Energy: Work and Energy Revisited • Derive the equation for rotational work. • Calculate rotational kinetic energy. • Demonstrate the Law of Conservation of Energy. 10.5. Angular Momentum and Its Conservation • Understand the analogy between angular momentum and linear momentum. • Observe the relationship between torque and angular momentum. • Apply the law of conservation of angular momentum. 10.6. Collisions of Extended Bodies in Two Dimensions • Observe collisions of extended bodies in two dimensions. • Examine collision at the point of percussion. -

AP Physics 2: Algebra Based
AP® PHYSICS 2 TABLE OF INFORMATION CONSTANTS AND CONVERSION FACTORS -27 -19 Proton mass, mp =1.67 ¥ 10 kg Electron charge magnitude, e =1.60 ¥ 10 C -27 -19 Neutron mass, mn =1.67 ¥ 10 kg 1 electron volt, 1 eV= 1.60 ¥ 10 J -31 8 Electron mass, me =9.11 ¥ 10 kg Speed of light, c =3.00 ¥ 10 m s Universal gravitational Avogadro’s number, N 6.02 1023 mol- 1 -11 3 2 0 = ¥ constant, G =6.67 ¥ 10 m kg s Acceleration due to gravity 2 Universal gas constant, R = 8.31 J (mol K) at Earth’s surface, g = 9.8 m s -23 Boltzmann’s constant, kB =1.38 ¥ 10 J K 1 unified atomic mass unit, 1 u=¥= 1.66 10-27 kg 931 MeV c2 -34 -15 Planck’s constant, h =¥=¥6.63 10 J s 4.14 10 eV s -25 3 hc =¥=¥1.99 10 J m 1.24 10 eV nm -12 2 2 Vacuum permittivity, e0 =8.85 ¥ 10 C N m 9 22 Coulomb’s law constant, k =1 4pe0 = 9.0 ¥ 10 N m C -7 Vacuum permeability, mp0 =4 ¥ 10 (T m) A -7 Magnetic constant, k¢ =mp0 4 = 1 ¥ 10 (T m) A 1 atmosphere pressure, 1 atm=¥= 1.0 1052 N m 1.0¥ 105 Pa meter, m mole, mol watt, W farad, F kilogram, kg hertz, Hz coulomb, C tesla, T UNIT second, s newton, N volt, V degree Celsius, ∞C SYMBOLS ampere, A pascal, Pa ohm, W electron volt, eV kelvin, K joule, J henry, H PREFIXES VALUES OF TRIGONOMETRIC FUNCTIONS FOR COMMON ANGLES Factor Prefix Symbol q 0 30 37 45 53 60 90 12 tera T 10 sinq 0 12 35 22 45 32 1 109 giga G cosq 1 32 45 22 35 12 0 106 mega M 103 kilo k tanq 0 33 34 1 43 3 • 10-2 centi c 10-3 milli m The following conventions are used in this exam. -

Kinematics Definition: (A) the Branch of Mechanics Concerned with The
Chapter 3 – Kinematics Definition: (a) The branch of mechanics concerned with the motion of objects without reference to the forces that cause the motion. (b) The features or properties of motion in an object, regarded in such a way. “Kinematics can be used to find the possible range of motion for a given mechanism, or, working in reverse, can be used to design a mechanism that has a desired range of motion. The movement of a crane and the oscillations of a piston in an engine are both simple kinematic systems. The crane is a type of open kinematic chain, while the piston is part of a closed four‐bar linkage.” Distinguished from dynamics, e.g. F = ma Several considerations: 3.2 – 3.2.2 How do wheels motions affect robot motion (HW 2) 3.2.3 Wheel constraints (rolling and sliding) for Fixed standard wheel Steered standard wheel Castor wheel Swedish wheel Spherical wheel 3.2.4 Combine effects of all the wheels to determine the constraints on the robot. “Given a mobile robot with M wheels…” 3.2.5 Two examples drawn from 3.2.4: Differential drive. Yields same result as in 3.2 (HW 2) Omnidrive (3 Swedish wheels) Conclusion (pp. 76‐77): “We can see from the preceding examples that robot motion can be predicted by combining the rolling constraints of individual wheels.” “The sliding constraints can be used to …evaluate the maneuverability and workspace of the robot rather than just its predicted motion.” 3.3 Mobility and (vs.) Maneuverability Mobility: ability to directly move in the environment.