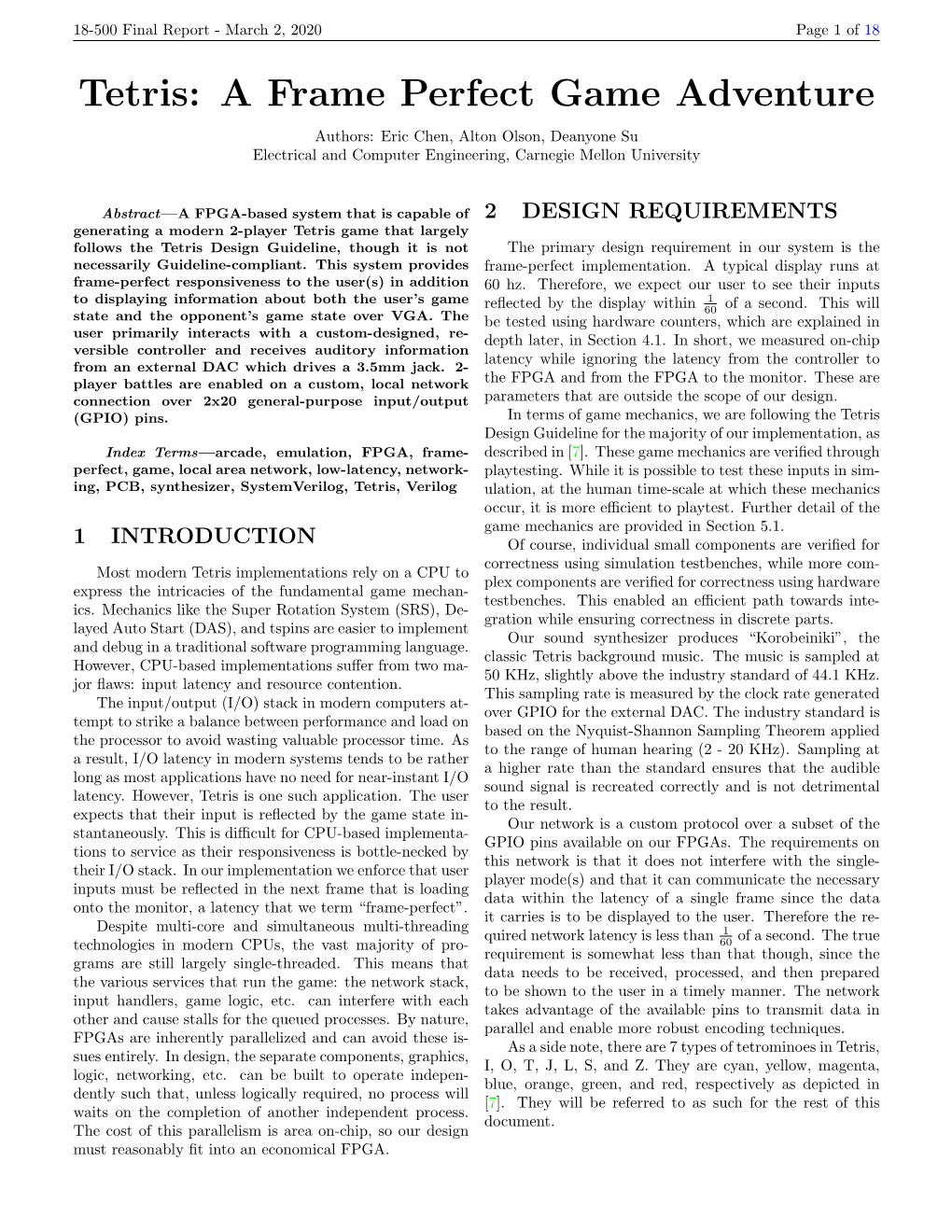
Tetris: a Frame Perfect Game Adventure Authors: Eric Chen, Alton Olson, Deanyone Su Electrical and Computer Engineering, Carnegie Mellon University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Links to the Past User Research Rage 2
ALL FORMATS LIFTING THE LID ON VIDEO GAMES User Research Links to Game design’s the past best-kept secret? The art of making great Zelda-likes Issue 9 £3 wfmag.cc 09 Rage 2 72000 Playtesting the 16 neon apocalypse 7263 97 Sea Change Rhianna Pratchett rewrites the adventure game in Lost Words Subscribe today 12 weeks for £12* Visit: wfmag.cc/12weeks to order UK Price. 6 issue introductory offer The future of games: subscription-based? ow many subscription services are you upfront, would be devastating for video games. Triple-A shelling out for each month? Spotify and titles still dominate the market in terms of raw sales and Apple Music provide the tunes while we player numbers, so while the largest publishers may H work; perhaps a bit of TV drama on the prosper in a Spotify world, all your favourite indie and lunch break via Now TV or ITV Player; then back home mid-tier developers would no doubt ounder. to watch a movie in the evening, courtesy of etix, MIKE ROSE Put it this way: if Spotify is currently paying artists 1 Amazon Video, Hulu… per 20,000 listens, what sort of terrible deal are game Mike Rose is the The way we consume entertainment has shifted developers working from their bedroom going to get? founder of No More dramatically in the last several years, and it’s becoming Robots, the publishing And before you think to yourself, “This would never increasingly the case that the average person doesn’t label behind titles happen – it already is. -

Fighting Games, Performativity, and Social Game Play a Dissertation
The Art of War: Fighting Games, Performativity, and Social Game Play A dissertation presented to the faculty of the Scripps College of Communication of Ohio University In partial fulfillment of the requirements for the degree Doctor of Philosophy Todd L. Harper November 2010 © 2010 Todd L. Harper. All Rights Reserved. This dissertation titled The Art of War: Fighting Games, Performativity, and Social Game Play by TODD L. HARPER has been approved for the School of Media Arts and Studies and the Scripps College of Communication by Mia L. Consalvo Associate Professor of Media Arts and Studies Gregory J. Shepherd Dean, Scripps College of Communication ii ABSTRACT HARPER, TODD L., Ph.D., November 2010, Mass Communications The Art of War: Fighting Games, Performativity, and Social Game Play (244 pp.) Director of Dissertation: Mia L. Consalvo This dissertation draws on feminist theory – specifically, performance and performativity – to explore how digital game players construct the game experience and social play. Scholarship in game studies has established the formal aspects of a game as being a combination of its rules and the fiction or narrative that contextualizes those rules. The question remains, how do the ways people play games influence what makes up a game, and how those players understand themselves as players and as social actors through the gaming experience? Taking a qualitative approach, this study explored players of fighting games: competitive games of one-on-one combat. Specifically, it combined observations at the Evolution fighting game tournament in July, 2009 and in-depth interviews with fighting game enthusiasts. In addition, three groups of college students with varying histories and experiences with games were observed playing both competitive and cooperative games together. -

Pynchon's Sound of Music
Pynchon’s Sound of Music Christian Hänggi Pynchon’s Sound of Music DIAPHANES PUBLISHED WITH SUPPORT BY THE SWISS NATIONAL SCIENCE FOUNDATION 1ST EDITION ISBN 978-3-0358-0233-7 10.4472/9783035802337 DIESES WERK IST LIZENZIERT UNTER EINER CREATIVE COMMONS NAMENSNENNUNG 3.0 SCHWEIZ LIZENZ. LAYOUT AND PREPRESS: 2EDIT, ZURICH WWW.DIAPHANES.NET Contents Preface 7 Introduction 9 1 The Job of Sorting It All Out 17 A Brief Biography in Music 17 An Inventory of Pynchon’s Musical Techniques and Strategies 26 Pynchon on Record, Vol. 4 51 2 Lessons in Organology 53 The Harmonica 56 The Kazoo 79 The Saxophone 93 3 The Sounds of Societies to Come 121 The Age of Representation 127 The Age of Repetition 149 The Age of Composition 165 4 Analyzing the Pynchon Playlist 183 Conclusion 227 Appendix 231 Index of Musical Instruments 233 The Pynchon Playlist 239 Bibliography 289 Index of Musicians 309 Acknowledgments 315 Preface When I first read Gravity’s Rainbow, back in the days before I started to study literature more systematically, I noticed the nov- el’s many references to saxophones. Having played the instru- ment for, then, almost two decades, I thought that a novelist would not, could not, feature specialty instruments such as the C-melody sax if he did not play the horn himself. Once the saxophone had caught my attention, I noticed all sorts of uncommon references that seemed to confirm my hunch that Thomas Pynchon himself played the instrument: McClintic Sphere’s 4½ reed, the contra- bass sax of Against the Day, Gravity’s Rainbow’s Charlie Parker passage. -

The Game of Tetris in Machine Learning
The Game of Tetris in Machine Learning Simon´ Algorta 1 Ozg¨ ur¨ S¸ims¸ek 2 Abstract proaches to other games and to real-world problems. In the Appendix we provide a table of the algorithms reviewed The game of Tetris is an important benchmark and a description of the features used. for research in artificial intelligence and ma- chine learning. This paper provides a histori- cal account of the algorithmic developments in 2. The Game of Tetris Tetris and discusses open challenges. Hand- Tetris is one of the most well liked video games of all time. crafted controllers, genetic algorithms, and rein- It was created by Alexey Pajitnov in the USSR in 1984. forcement learning have all contributed to good It quickly turned into a popular culture icon that ignited solutions. However, existing solutions fall far copyright battles amid the tensions of the final years of the short of what can be achieved by expert players Cold War (Temple, 2004). playing without time pressure. Further study of the game has the potential to contribute to impor- The game is played on a two-dimensional grid, initially tant areas of research, including feature discov- empty. The grid gradually fills up as pieces of different ery, autonomous learning of action hierarchies, shapes, called Tetriminos, fall from the top, one at a time. and sample-efficient reinforcement learning. The player can control how each Tetrimino lands by rotat- ing it and moving it horizontally, to the left or to the right, any number of times, as it falls one row at a time until one 1. -
Project Design: Tetris
Project Design: Tetris Prof. Stephen Edwards Spring 2020 Arsalaan Ansari (aaa2325) Kevin Rayfeng Li (krl2134) Sooyeon Jo (sj2801) Josh Learn (jrl2196) Introduction The purpose of this project is to build a Tetris video game system using System Verilog and C language on a FPGA board. Our Tetris game will be a single player game where the computer randomly generates tetromino blocks (in the shapes of O, J, L, Z, S, I) that the user can rotate using their keyboard. Tetrominoes can be stacked to create lines that will be cleared by the computer and be counted as points that will be tracked. Once a tetromino passes the boundary of the screen the user will lose. Fig 1: Screenshot from an online implementation of Tetris User input will come through key inputs from a keyboard, and the Tetris sprite based output will be displayed using a VGA display. The System Verilog code will create the sprite based imagery for the VGA display and will communicate with the C language game logic to change what is displayed. Additionally, the System Verilog code will generate accompanying audio that will supplement the game in the form of sound effects. The C game logic will generate random tetromino blocks to drop, translate key inputs to rotation of blocks, detect and clear lines, determine what sound effects to be played, keep track of the score, and determine when the game has ended. Architecture The figure below is the architecture for our project Fig 2: Proposed architecture Hardware Implementation VGA Block The Tetris game will have 3 layers of graphics. -

Newagearcade.Com 5000 in One Arcade Game List!
Newagearcade.com 5,000 In One arcade game list! 1. AAE|Armor Attack 2. AAE|Asteroids Deluxe 3. AAE|Asteroids 4. AAE|Barrier 5. AAE|Boxing Bugs 6. AAE|Black Widow 7. AAE|Battle Zone 8. AAE|Demon 9. AAE|Eliminator 10. AAE|Gravitar 11. AAE|Lunar Lander 12. AAE|Lunar Battle 13. AAE|Meteorites 14. AAE|Major Havoc 15. AAE|Omega Race 16. AAE|Quantum 17. AAE|Red Baron 18. AAE|Ripoff 19. AAE|Solar Quest 20. AAE|Space Duel 21. AAE|Space Wars 22. AAE|Space Fury 23. AAE|Speed Freak 24. AAE|Star Castle 25. AAE|Star Hawk 26. AAE|Star Trek 27. AAE|Star Wars 28. AAE|Sundance 29. AAE|Tac/Scan 30. AAE|Tailgunner 31. AAE|Tempest 32. AAE|Warrior 33. AAE|Vector Breakout 34. AAE|Vortex 35. AAE|War of the Worlds 36. AAE|Zektor 37. Classic Arcades|'88 Games 38. Classic Arcades|1 on 1 Government (Japan) 39. Classic Arcades|10-Yard Fight (World, set 1) 40. Classic Arcades|1000 Miglia: Great 1000 Miles Rally (94/07/18) 41. Classic Arcades|18 Holes Pro Golf (set 1) 42. Classic Arcades|1941: Counter Attack (World 900227) 43. Classic Arcades|1942 (Revision B) 44. Classic Arcades|1943 Kai: Midway Kaisen (Japan) 45. Classic Arcades|1943: The Battle of Midway (Euro) 46. Classic Arcades|1944: The Loop Master (USA 000620) 47. Classic Arcades|1945k III 48. Classic Arcades|19XX: The War Against Destiny (USA 951207) 49. Classic Arcades|2 On 2 Open Ice Challenge (rev 1.21) 50. Classic Arcades|2020 Super Baseball (set 1) 51. -

Full Games List Pandora DX 3000 in 1
www.myarcade.com.au Ph 0412227168 Full Games List Pandora DX 3000 in 1 1. 10-YARD FIGHT – (1/2P) – (1464) 38. ACTION 52 – (1/2P) – (2414) 2. 16 ZHANG MA JIANG – (1/2P) – 39. ACTION FIGHTER – (1/2P) – (1093) (2391) 40. ACTION HOLLYWOOOD – (1/2P) – 3. 1941 : COUNTER ATTACK – (1/2P) – (362) (860) 41. ADDAMS FAMILY VALUES – (1/2P) – 4. 1942 – (1/2P) – (861) (2431) 5. 1942 – AIR BATTLE – (1/2P) – (1140) 42. ADVENTUROUS BOY-MAO XIAN 6. 1943 : THE BATTLE OF MIDWAY – XIAO ZI – (1/2P) – (2266) (1/2P) – (862) 43. AERO FIGHTERS – (1/2P) – (927) 7. 1943 KAI : MIDWAY KAISEN – (1/2P) 44. AERO FIGHTERS 2 – (1/2P) – (810) – (863) 45. AERO FIGHTERS 3 – (1/2P) – (811) 8. 1943: THE BATTLE OF MIDWAY – 46. AERO FIGHTERS 3 BOSS – (1/2P) – (1/2P) – (1141) (812) 9. 1944 : THE LOOP MASTER – (1/2P) 47. AERO FIGHTERS- UNLIMITED LIFE – (780) – (1/2P) – (2685) 10. 1945KIII – (1/2P) – (856) 48. AERO THE ACRO-BAT – (1/2P) – 11. 19XX : THE WAR AGAINST DESTINY (2222) – (1/2P) – (864) 49. AERO THE ACRO-BAT 2 – (1/2P) – 12. 2 ON 2 OPEN ICE CHALLENGE – (2624) (1/2P) – (1415) 50. AERO THE ACRO-BAT 2 (USA) – 13. 2020 SUPER BASEBALL – (1/2P) – (1/2P) – (2221) (1215) 51. AFTER BURNER II – (1/2P) – (1142) 14. 3 COUNT BOUT – (1/2P) – (1312) 52. AGENT SUPER BOND – (1/2P) – 15. 4 EN RAYA – (1/2P) – (1612) (2022) 16. 4 FUN IN 1 – (1/2P) – (965) 53. AGGRESSORS OF DARK KOMBAT – 17. 46 OKUNEN MONOGATARI – (1/2P) (1/2P) – (106) – (2711) 54. -
Concert Program
Gamer Symphony Orchestra Spring 2014 Concert Saturday, May 3, 2014, 2 p.m. Dekelboum Concert Hall Clarice Smith Performing Arts Center Jacob Coppage-Gross, Conductor Kevin Mok, Conductor Kyle G. Jamolin, Choral Director Bryan Doyle, Assistant Conductor About the GSO In the fall of 2005, student violist Michelle Eng sought to create an orchestral group that played video game music. With a half-dozen others from the University of Maryland Repertoire Orchestra, she founded GSO to achieve that dream. By the time of the ensemble’s first public performance in spring 2006, its size had quadrupled. Today GSO provides a musical and social outlet to 120 members. It is the world’s first collegiate ensemble to draw its repertoire exclusively from the soundtracks of video games. The ensemble is entirely student run, which includes conducting and musical arranging. In February of 2012 the GSO collaborated with Video Games Live!, for the performances at the Strathmore in Bethesda, Md. The National Philharmonic per- formed the GSO’s arrangement of “Korobeiniki” from Tetris to two sold-out houses. In May of 2012 the GSO was invited to perform as part of the Smithsonian’s The Art of Video Games exhibit. Aside from its concerts, GSO also holds the “Deathmatch for Charity” (renamed the “Gamer Olympics” this year) video game tournament every spring. All proceeds benefit Children’s National Medical Center in Washington, D.C. Find GSO online at UMD.gamersymphony.org Beyond the GSO The GSO has also fostered the creation of a multitude of other collegiate GSOs at California State University—Northridge, Ithaca College, Montclair State University, the University of California—Los Angeles, the University of Delaware, and West Char- ter University. -

Financial Results Briefing for Fiscal Year Ended March 2019
Financial Results Briefing for Fiscal Year Ended March 2019 Thank you for making time to attend. I am Shuntaro Furukawa, President of Nintendo. Mr. Takahashi, Senior Fiscal Year Ended March 2019 Executive Officer, has just presented our financial results for the period. Now, I will cover the current Financial Results Briefing business situation, as well as the business outlook for April 26, 2019 Nintendo Co., Ltd. the new fiscal year. Director and President Shuntaro Furukawa I’ll start with the current state of the Nintendo Switch business. Nintendo Switch has continued to gain momentum after January subsequent to the holiday Current State of the season. Business is going well, and we expect continued Nintendo Switch Business growth. Let me discuss these points in order. Nintendo Switch Console Sell-Through (JP/NA/EU) As mentioned at the February corporate management 8 FY Ended March 2019 policy briefing, sales of the Nintendo Switch system 7 FY Ended March 2018 6 were strong during the holiday season, and sell-through 5 4 +35% has continued to be solid through the start of this year. 3 2 This slide shows combined sell-through for the 1 Japanese, North American, and European markets. As 0 April July October January (million through through through through units) June September December March Source: Nintendo , Media Create you can see, sell-through from January to March was 35% higher than the same period of the previous year. Note: Sell-through refers to units sold by retailers to consumers. 1 Financial Results Briefing for Fiscal Year Ended March 2019 Nintendo Switch Console Sell-Through (JP/NA/EU) This graph shows cumulative sell-through trends 16 throughout the full fiscal year combined for Japan, North 14 FY Ended March 2019 +23% 12 America, and Europe. -

10-Yard Fight 1942 1943
10-Yard Fight 1942 1943 - The Battle of Midway 2048 (tsone) 3-D WorldRunner 720 Degrees 8 Eyes Abadox - The Deadly Inner War Action 52 (Rev A) (Unl) Addams Family, The - Pugsley's Scavenger Hunt Addams Family, The Advanced Dungeons & Dragons - DragonStrike Advanced Dungeons & Dragons - Heroes of the Lance Advanced Dungeons & Dragons - Hillsfar Advanced Dungeons & Dragons - Pool of Radiance Adventure Island Adventure Island II Adventure Island III Adventures in the Magic Kingdom Adventures of Bayou Billy, The Adventures of Dino Riki Adventures of Gilligan's Island, The Adventures of Lolo Adventures of Lolo 2 Adventures of Lolo 3 Adventures of Rad Gravity, The Adventures of Rocky and Bullwinkle and Friends, The Adventures of Tom Sawyer After Burner (Unl) Air Fortress Airwolf Al Unser Jr. Turbo Racing Aladdin (Europe) Alfred Chicken Alien 3 Alien Syndrome (Unl) All-Pro Basketball Alpha Mission Amagon American Gladiators Anticipation Arch Rivals - A Basketbrawl! Archon Arkanoid Arkista's Ring Asterix (Europe) (En,Fr,De,Es,It) Astyanax Athena Athletic World Attack of the Killer Tomatoes Baby Boomer (Unl) Back to the Future Back to the Future Part II & III Bad Dudes Bad News Baseball Bad Street Brawler Balloon Fight Bandai Golf - Challenge Pebble Beach Bandit Kings of Ancient China Barbie (Rev A) Bard's Tale, The Barker Bill's Trick Shooting Baseball Baseball Simulator 1.000 Baseball Stars Baseball Stars II Bases Loaded (Rev B) Bases Loaded 3 Bases Loaded 4 Bases Loaded II - Second Season Batman - Return of the Joker Batman - The Video Game -

Battle Royale Is a Big Thing
46 ............... Sunday, February 24, 2019 1SM 1SM Sunday, February 24, 2019 ............... 47 MORTAL Kombat 11 fighters are have now revealed that Jade is join- TEKKEN fans better brace the game next Thursday. Negan llike buses as you wait for ever ing the ranks of the new game. lthemselves as it’s been joins the game with a more TV show and three get announced in a row. Mortal Kombat 11 smashes its way announced that series favourite look than the comics as he is based After the news last week of Nether- out on April 23 on Xbox One, PS4, Julia and the highly anticipated on the Jeffrey Dean Morgan version GAMES & MUSIC realm adding Kabal and D’Vorah they and PC. Walking Dead’s Negan will be hitting from the smash AMC show. Battle Creating an royale apocalypse Hey good nuking HARD is awesome Times Clothing has just unveiled EXCLUSIVE INTERVIEW NEW is a big their latest design called Void, which is inspired by EXCLUSIVE the Apex Legend character IMMITATION is the sincerest form of flattery…or so MUSIC INTERVIEW Wraith. Void is available they say. By Jim Gellatly to pre-order now at The team behind Far Cry certainly got the point when rival post-apocalytic first person shooter Rage MICROSOFT maestro hardtimesclothing.co.uk. thing Costs £22. 2 issued a very similar marketing poster, below left, ARCADES Joseph Staten has been ahead of the game’s launch. WHO: Matt Thomson, Max Graham. one of the linchpins behind IT’S no secret Battle Royale games Spot a cool gun, tag it. -

Nintendo Eshop
Nintendo eShop Last Updated on October 2, 2021 Title Publisher Qty Box Man Comments #RaceDieRun QubicGames 1-2-Switch Nintendo 10-in-1: Arcade Collection Gamelion Studios 101 DinoPets 3D Selectsoft 2 Fast 4 Gnomz QubicGames 2048 Cosmigo 3D Fantasy Zone Sega 3D Fantasy Zone II Sega 3D Game Collection Joindots 3D MahJongg Joindots 3D Out Run Sega 3D Solitaire Zen Studios 3D Sonic The Hedgehog Sega 3D Sonic The Hedgehog 2 Sega 3D Thunder Blade Sega 80's Overdrive Insane Code A Short Hike Whippoorwill Limited A-Train 3D: City Simulator Natsume Abyss EnjoyUp Games ACA NeoGeo: Alpha Mission II Hamster ACA NeoGeo: Baseball Stars 2 Hamster ACA NeoGeo: Blazing Star Hamster ACA NeoGeo: Cyber-Lip Hamster ACA NeoGeo: Garou - Mark of the Wolves Hamster ACA NeoGeo: Gururin HAMSTER, Co. ACA NeoGeo: King of Fighters '98, The HAMSTER, Co. ACA NeoGeo: Last Resort Hamster ACA NeoGeo: Magical Drop II HAMSTER, Co. ACA NeoGeo: Magical Drop III HAMSTER, Co. ACA NeoGeo: Money Puzzle Exchanger Hamster ACA NeoGeo: Neo Turf Masters Hamster ACA NeoGeo: Ninja Combat Hamster ACA NeoGeo: Ninja Commando Hamster ACA NeoGeo: Prehistoric Isle 2 Hamster ACA NeoGeo: Pulstar Hamster ACA NeoGeo: Puzzle Bobble 2 HAMSTER, Co. ACA NeoGeo: Puzzled HAMSTER, Co. ACA NeoGeo: Sengoku Hamster ACA NeoGeo: Sengoku 2 Hamster ACA NeoGeo: Sengoku 3 Hamster ACA NeoGeo: Shock Troopers Hamster ACA NeoGeo: Top Hunter - Roddy & Cathy Hamster ACA NeoGeo: Twinkle Star Sprites Hamster ACA NeoGeo: Waku Waku 7 Hamster ACA NeoGeo: Zed Blade Hamster ACA NeoGeo: Zupapa! Hamster Advance Wars Nintendo Adventure Bar Story CIRCLE Ent. Adventure Labyrinth Story CIRCLE Entertainment Adventure Time: Hey Ice King! Why'd you steal our garbage?!! D3 Publisher Adventures of Elena Temple, The GrimTalin Adventures of Elena Temple, The: Definitive Edition: Switch Grimtalin Aero Porter Level-5 AeternoBlade Corecell Technology This checklist is generated using RF Generation's Database This checklist is updated daily, and it's completeness is dependent on the completeness of the database.