Video Formation, Perception, and Representation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING
COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING Color space A color model is an abstract mathematical model describing the way colors can be represented as tuples of numbers, typically as three or four values or color components (e.g. RGB and CMYK are color models). However, a color model with no associated mapping function to an absolute color space is a more or less arbitrary color system with little connection to the requirements of any given application. Adding a certain mapping function between the color model and a certain reference color space results in a definite "footprint" within the reference color space. This "footprint" is known as a gamut, and, in combination with the color model, defines a new color space. For example, Adobe RGB and sRGB are two different absolute color spaces, both based on the RGB model. In the most generic sense of the definition above, color spaces can be defined without the use of a color model. These spaces, such as Pantone, are in effect a given set of names or numbers which are defined by the existence of a corresponding set of physical color swatches. This article focuses on the mathematical model concept. Understanding the concept Most people have heard that a wide range of colors can be created by the primary colors red, blue, and yellow, if working with paints. Those colors then define a color space. We can specify the amount of red color as the X axis, the amount of blue as the Y axis, and the amount of yellow as the Z axis, giving us a three-dimensional space, wherein every possible color has a unique position. -

Off the Grid
IOP PUBLISHING NANOTECHNOLOGY Nanotechnology 24 (2013) 335703 (7pp) doi:10.1088/0957-4484/24/33/335703 Improved accuracy and speed in scanning probe microscopy by image reconstruction from non-gridded position sensor data Dominik Ziegler1, Travis R Meyer2, Rodrigo Farnham3, Christoph Brune4, Andrea L Bertozzi2 and Paul D Ashby1 1 Lawrence Berkeley National Laboratory, Molecular Foundry, 1 Cyclotron Road, 94720 Berkeley, CA, USA 2 Department of Mathematics, University of California Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555, USA 3 Department of Mathematics and Statistics, California State University, Long Beach, 1250 Bellflower Boulevard, Long Beach, CA, 90840-1001, USA 4 Department of Mathematics and Computer Science, University of Munster,¨ Einsteinstrasse 62, D-48149 Munster,¨ Germany E-mail: [email protected] Received 16 March 2013, in final form 3 July 2013 Published 26 July 2013 Online at stacks.iop.org/Nano/24/335703 Abstract Scanning probe microscopy (SPM) has facilitated many scientific discoveries utilizing its strengths of spatial resolution, non-destructive characterization and realistic in situ environments. However, accurate spatial data are required for quantitative applications but this is challenging for SPM especially when imaging at higher frame rates. We present a new operation mode for scanning probe microscopy that uses advanced image processing techniques to render accurate images based on position sensor data. This technique, which we call sensor inpainting, frees the scanner to no longer be at a specific location at a given time. This drastically reduces the engineering effort of position control and enables the use of scan waveforms that are better suited for the high inertia nanopositioners of SPM. -

Comparison of HDTV Formats Using Objective Video Quality Measures
Multimed Tools Appl DOI 10.1007/s11042-009-0441-2 Comparison of HDTV formats using objective video quality measures Emil Dumic & Sonja Grgic & Mislav Grgic # Springer Science+Business Media, LLC 2010 Abstract In this paper we compare some of the objective quality measures with subjective, in several HDTV formats, to be able to grade the quality of the objective measures. Also, comparison of objective and subjective measures between progressive and interlaced video signal will be presented to determine which scanning emission format is better, even if it has different resolution format. Several objective quality measures will be tested, to examine the correlation with the subjective test, using various performance measures. Keywords Video quality . PSNR . VQM . SSIM . TSCES . HDTV. H.264/AVC . RMSE . Correlation 1 Introduction High-Definition Television (HDTV) acceptance in home environments directly depends on two key factors: the availability of adequate HDTV broadcasts to the consumer’s home and the availability of HDTV display devices at mass market costs [6]. Although the United States, Japan and Australia have been broadcasting HDTV for some years, real interest of the general public appeared recently with the severe reduction of HDTV home equipment price. Nowadays many broadcasters in Europe have started to offer HDTV broadcasts as part of Pay-TV bouquets (like BSkyB, Sky Italia, Premiere, Canal Digital ...). Other major public broadcasters in Europe have plans for offering HDTV channels in the near future. The announcement of Blu-Ray Disc and Game consoles with HDTV resolutions has also increased consumer demand for HDTV broadcasting. The availability of different HDTV image formats such as 720p/50, 1080i/25 and 1080p/50 places the question for many users which HDTV format should be used with which compression algorithm, together with the corresponding bit rate. -
Colour Space Conversion
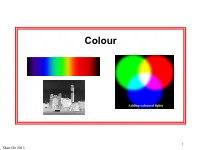
Colour 1 Shan He 2013 What is light? 'White' light is a combination of many different light wavelengths 2 Shan He 2013 Colour spectrum – visible light • Colour is how we perceive variation in the energy (oscillation wavelength) of visible light waves/particles. Ultraviolet Infrared 400 nm Wavelength 700 nm • Our eye perceives lower energy light (longer wavelength) as so-called red; and higher (shorter wavelength) as so-called blue • Our eyes are more sensitive to light (i.e. see it with more intensity) in some frequencies than in others 3 Shan He 2013 Colour perception . It seems that colour is our brain's perception of the relative levels of stimulation of the three types of cone cells within the human eye . Each type of cone cell is generally sensitive to the red, blue and green regions of the light spectrum Images of living human retina with different cones sensitive to different colours. 4 Shan He 2013 Colour perception . Spectral sensitivity of the cone cells overlap somewhat, so one wavelength of light will likely stimulate all three cells to some extent . So by mixing multiple components pure light (i.e. of a fixed spectrum) and altering intensity of the mixed components, we can vary the overall colour that is perceived by the brain. 5 Shan He 2013 Colour perception: Eye of Brain? • Stroop effect 6 Shan He 2013 Do you see same colours I see? • The number of color-sensitive cones in the human retina differs dramatically among people • Language might affect the way we perceive colour 7 Shan He 2013 Colour spaces . -
BA(Prog)III Yr 14/04/2020 Displays Interlacing and Progressive Scan
BA(prog)III yr 14/04/2020 Displays • Colored phosphors on a cathode ray tube (CRT) screen glow red, green, or blue when they are energized by an electron beam. • The intensity of the beam varies as it moves across the screen, some colors glow brighter than others. • Finely tuned magnets around the picture tube aim the electrons onto the phosphor screen, while the intensity of the beamis varied according to the video signal. This is why you needed to keep speakers (which have strong magnets in them) away from a CRT screen. • A strong external magnetic field can skew the electron beam to one area of the screen and sometimes caused a permanent blotch that cannot be fixed by degaussing—an electronic process that readjusts the magnets that guide the electrons. • If a computer displays a still image or words onto a CRT for a long time without changing, the phosphors will permanently change, and the image or words can become visible, even when the CRT is powered down. Screen savers were invented to prevent this from happening. • Flat screen displays are all-digital, using either liquid crystal display (LCD) or plasma technologies, and have replaced CRTs for computer use. • Some professional video producers and studios prefer CRTs to flat screen displays, claiming colors are brighter and more accurately reproduced. • Full integration of digital video in cameras and on computers eliminates the analog television form of video, from both the multimedia production and the delivery platform. • If your video camera generates a digital output signal, you can record your video direct-to-disk, where it is ready for editing. -

Er.Heena Gulati, Er. Parminder Singh
International Journal of Computer Science Trends and Technology (IJCST) – Volume 3 Issue 2, Mar-Apr 2015 RESEARCH ARTICLE OPEN ACCESS SWT Approach For The Detection Of Cotton Contaminants Er.Heena Gulati [1], Er. Parminder Singh [2] Research Scholar [1], Assistant Professor [2] Department of Computer Science and Engineering Doaba college of Engineering and Technology Kharar PTU University Punjab - India ABSTRACT Presence of foreign fibers’ & cotton contaminants in cotton degrades the quality of cotton The digital image processing techniques based on computer vision provides a good way to eliminate such contaminants from cotton. There are various techniques used to detect the cotton contaminants and foreign fibres. The major contaminants found in cotton are plastic film, nylon straps, jute, dry cotton, bird feather, glass, paper, rust, oil grease, metal wires and various foreign fibres like silk, nylon polypropylene of different colors and some of white colour may or may not be of cotton itself. After analyzing cotton contaminants characteristics adequately, the paper presents various techniques for detection of foreign fibres and contaminants from cotton. Many techniques were implemented like HSI, YDbDR, YCbCR .RGB images are converted into these components then by calculating the threshold values these images are fused in the end which detects the contaminants .In this research the YCbCR , YDbDR color spaces and fusion technique is applied that is SWT in the end which will fuse the image which is being analysis according to its threshold value and will provide good results which are based on parameters like mean ,standard deviation and variance and time. Keywords:- Cotton Contaminants; Detection; YCBCR,YDBDR,SWT Fusion, Comparison I. -

A Review and Comparison on Different Video Deinterlacing
International Journal of Research ISSN NO:2236-6124 A Review and Comparison on Different Video Deinterlacing Methodologies 1Boyapati Bharathidevi,2Kurangi Mary Sujana,3Ashok kumar Balijepalli 1,2,3 Asst.Professor,Universal College of Engg & Technology,Perecherla,Guntur,AP,India-522438 [email protected],[email protected],[email protected] Abstract— Video deinterlacing is a key technique in Interlaced videos are generally preferred in video broadcast digital video processing, particularly with the widespread and transmission systems as they reduce the amount of data to usage of LCD and plasma TVs. Interlacing is a widely used be broadcast. Transmission of interlaced videos was widely technique, for television broadcast and video recording, to popular in various television broadcasting systems such as double the perceived frame rate without increasing the NTSC [2], PAL [3], SECAM. Many broadcasting agencies bandwidth. But it presents annoying visual artifacts, such as made huge profits with interlaced videos. Video acquiring flickering and silhouette "serration," during the playback. systems on many occasions naturally acquire interlaced video Existing state-of-the-art deinterlacing methods either ignore and since this also proved be an efficient way, the popularity the temporal information to provide real-time performance of interlaced videos escalated. but lower visual quality, or estimate the motion for better deinterlacing but with a trade-off of higher computational cost. The question `to interlace or not to interlace' divides the TV and the PC communities. A proper answer requires a common understanding of what is possible nowadays in deinterlacing video signals. This paper outlines the most relevant methods, and provides a relative comparison. -

Video Terminology Video Standards Progressive Vs
VIDEO TERMINOLOGY VIDEO STANDARDS 1. NTSC - 525 Scanlines/frame rate - 30fps North & Central America, Phillipines & Taiwan . NTSC J - Japan has a darker black 2. PAL - 625 scanlines 25 fps Europe, Scandinavia parts of Asia, Pacific & South Africa. PAL in Brazil is 30fps and PAL colours 3. SECAM France Russia Middle East and North Africa PROGRESSIVE VS INTERLACED VIDEO All computer monitors use a progressive scan - each scan line in sequence. Interlacing is only for CRT monitors. LCD monitors work totally differently - no need to worry about. Interlacing is for broadcast TV. Every other line displayed alternatively. FRAME RATES As we transition from analogue video to digitla video. Film is 24 fps, PAL video 25 fps. NTSC 30fps. Actually film and NTSC are slightly different but we don't need to worry about that for now. IMAGE SIZE All video is shot at 72 px/inch - DV NTSC - 720 x 480 (SD is 720 x 486) DV PAL - 720 x 576 (SD PAL is 720 x 576) HD comes in both progressive and interlaced. HD480i is usual broadcast TV 480p is 480 progressive. 720i is 720 interlaced 720p is progressive. 720 means 720 vertical lines 1080 is 1080 vertical lines. 1080i is most popular. 720p is 1280 x 720, HD 1080 is 1920x1080px. All HD formats are 16:9 aspect ratio. Traditional TV is 4:3 aspect ratio. HDV is 1440 x 1080. New format - is it the new HD version of DV? Cameras like the Sony and JVC make minor alterations to this format when shooting In summary HD 1080i = 1920 x 1080 HD 720p = 1280 x 720 Traditional = 720 x 480 (NTSC) 720 x 576 (PAL) VIDEO OUTPUTS Analog Composite, S-Video, Component in increasing quality. -
Graphics Systems
Graphics Systems Dr. S.M. Malaek Assistant: M. Younesi Overview Display Hardware How are images displayed? Overview (Display Devices) Raster Scan Displays Random Scan Displays Color CRT Monirors Direct View Storage Tube Flat panel Displays Three Dimensional Viewing Devices Stereoscopic and Virtual Reality System Overview (Display Devices) The display systems are often referred to as Video Monitor or Video Display Unit (VDU). Display Hardware Video Display Devices The primary output device in a graphics system is a monitor. Video Monitor Cathode Ray Tube (CRT) 1. Electron Guns 2. Electron Beams 3. Focusing Coils 4. Deflection Coils 5. Anode Connection 6. Shadow Mask 7. Phosphor layer 8. Close-up of the phosphor coated inner side of the screen Cathode Ray Tube (CRT) Refresh CRT Light emitted by the Phosphor fades very rapidly. Refresh CRT: One way to keep the phosphor glowing is to redraw the picture repeatedly by quickly directing the electron beam back over the same points. Electron Gun Electron Gun Heat is supplied to the cathode by the filament. Electron Gun The free electrons are then accelerated toward the phosphor coating by a high positive voltage. High Positive Voltage A positively charged metal coating on the inside of the CRT envelope near the phosphor screen. A positively charged metal High Positive Voltage An accelerating anode . Electron Gun Intensity of the electron beam is controlled by setting voltage level on the control grid. Electron Gun A smaller negative voltage on the control grid simply decrease the number of electrons passing through. Focusing System Focusing System The focusing system is needed to force the electron beam to converge into a small spot as it strikes the phosphor. -

Ipf-White-Paper-Farbsensorik Ohne
ipf_Brief_u_Rechn_Bg_Verw_27_04_09.qx7:IPF_Bb_Verwaltung_070206.qx5 27.04.2009 16:04 Uhr Seite 1 12 White Paper ‘True color’ sensors - See colors like a human does Author: Dipl.-Ing. Christian Fiebach Management Assistant © ipf electronic 2013 ipf_Brief_u_Rechn_Bg_Verw_27_04_09.qx7:IPF_Bb_Verwaltung_070206.qx5 27.04.2009 16:04 Uhr Seite 1 White Paper: ‘True color’ sensors - See colors like a human does _____________________________________________________________________ table of contents introduction 3 ‘normal observer’ determines the average value 4 Different color perception 5 standard colormetric system 6 three-dimensional color system 7 other color systems 9 sensors for ‘True color’detection 10 stating L*a*b* values is not possible with color sensors 11 2D presentations 12 3D presentations 13 different models for different tasks 14 the evaluation of ‘primary light sources’ 14 large detection areas 14 suitable for every surface 15 averages cope with difficult surfaces 15 application examples 16 1. type based selection of glass bottels 16 2. color markings on stainless steel 18 3. automated checking of paint 20 © ipf electronic 2013 2 ipf_Brief_u_Rechn_Bg_Verw_27_04_09.qx7:IPF_Bb_Verwaltung_070206.qx5 27.04.2009 16:04 Uhr Seite 1 White Paper: ‘True color’ sensors - See colors like a human does _____________________________________________________________________ introduction Applications where the color of certain objects has to be securely checked repeatedly present sensors with immense challenges. In particular, the different properties of artificial surfaces make it harder to reliably evaluate color. Why is that? And what solutions are available? In order to come closer to answering these questions, one must first know what abilities the human eye is capable of in the field of color recognition. -
What Is Computer Graphics?
What is Computer Graphics? A set of tools to create, manipulate and interact with pictures. Data (synthetic or natural) is visualized through geometric shapes, colors, textures. Exploits the pattern recognition capabilities of the human visual sys- tem. Graphical User Interfaces (GUI) - means to interact with complex applications Scientific, Engineering, Business and Educational applications. ITCS 4120-5120 1 Introduction What can we do with Computer Graphics? A core technology and infrastructure for drawing programs. Pervasive across scientific, engineering, business and educational applications. ITCS 4120-5120 2 Introduction Applications: 2D/3D Plotting ITCS 4120-5120 3 Introduction Applications:Computer-aided Drafting and Design (CAD) ITCS 4120-5120 4 Introduction Applications:Scientific Data Visualization Bio-Medicine (CAT Scan, MRI, PET), Biology. Biology (molecular structure/models), Bioinformatics (Gene sequences, proteins). Weather Data Environmental Data - pollution data.. ITCS 4120-5120 5 Introduction Applications:Medical Visualization: Visible Human Project From CT From the Physical Data ITCS 4120-5120 6 Introduction Applications:Computer Interfaces ITCS 4120-5120 7 Introduction Applications:Computer/Video Games ITCS 4120-5120 8 Introduction Applications: Entertainment (movies, animation, advertising) ITCS 4120-5120 9 Introduction Virtual and Immersive Environments ITCS 4120-5120 10 Introduction Virtual and Immersive Environments ITCS 4120-5120 11 Introduction What Disciplines does CG draw on? Algorithms Mathematics -

Basics of Video
Basics of Video Yao Wang Polytechnic University, Brooklyn, NY11201 [email protected] Video Basics 1 Outline • Color perception and specification (review on your own) • Video capture and disppy(lay (review on your own ) • Analog raster video • Analog TV systems • Digital video Yao Wang, 2013 Video Basics 2 Analog Video • Video raster • Progressive vs. interlaced raster • Analog TV systems Yao Wang, 2013 Video Basics 3 Raster Scan • Real-world scene is a continuous 3-DsignalD signal (temporal, horizontal, vertical) • Analog video is stored in the raster format – Sampling in time: consecutive sets of frames • To render motion properly, >=30 frame/s is needed – Sampling in vertical direction: a frame is represented by a set of scan lines • Number of lines depends on maximum vertical frequency and viewingg, distance, 525 lines in the NTSC s ystem – Video-raster = 1-D signal consisting of scan lines from successive frames Yao Wang, 2013 Video Basics 4 Progressive and Interlaced Scans Progressive Frame Interlaced Frame Horizontal retrace Field 1 Field 2 Vertical retrace Interlaced scan is developed to provide a trade-off between temporal and vertical resolution, for a given, fixed data rate (number of line/sec). Yao Wang, 2013 Video Basics 5 Waveform and Spectrum of an Interlaced Raster Horizontal retrace Vertical retrace Vertical retrace for first field from first to second field from second to third field Blanking level Black level Ӈ Ӈ Th White level Tl T T ⌬t 2 ⌬ t (a) Խ⌿( f )Խ f 0 fl 2fl 3fl fmax (b) Yao Wang, 2013 Video Basics 6 Color