The Kinematic Tree Algorithm Provides a Sequence of Waypoints, Airspeeds, Heading and Bank Angle Commands for Each Seg- Ment of the Path
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Evolving the Oblique Wing
NASA AERONAUTICS BOOK SERIES A I 3 A 1 A 0 2 H D IS R T A O W RY T A Bruce I. Larrimer MANUSCRIP . Bruce I. Larrimer Library of Congress Cataloging-in-Publication Data Larrimer, Bruce I. Thinking obliquely : Robert T. Jones, the Oblique Wing, NASA's AD-1 Demonstrator, and its legacy / Bruce I. Larrimer. pages cm Includes bibliographical references. 1. Oblique wing airplanes--Research--United States--History--20th century. 2. Research aircraft--United States--History--20th century. 3. United States. National Aeronautics and Space Administration-- History--20th century. 4. Jones, Robert T. (Robert Thomas), 1910- 1999. I. Title. TL673.O23L37 2013 629.134'32--dc23 2013004084 Copyright © 2013 by the National Aeronautics and Space Administration. The opinions expressed in this volume are those of the authors and do not necessarily reflect the official positions of the United States Government or of the National Aeronautics and Space Administration. This publication is available as a free download at http://www.nasa.gov/ebooks. Introduction v Chapter 1: American Genius: R.T. Jones’s Path to the Oblique Wing .......... ....1 Chapter 2: Evolving the Oblique Wing ............................................................ 41 Chapter 3: Design and Fabrication of the AD-1 Research Aircraft ................75 Chapter 4: Flight Testing and Evaluation of the AD-1 ................................... 101 Chapter 5: Beyond the AD-1: The F-8 Oblique Wing Research Aircraft ....... 143 Chapter 6: Subsequent Oblique-Wing Plans and Proposals ....................... 183 Appendices Appendix 1: Physical Characteristics of the Ames-Dryden AD-1 OWRA 215 Appendix 2: Detailed Description of the Ames-Dryden AD-1 OWRA 217 Appendix 3: Flight Log Summary for the Ames-Dryden AD-1 OWRA 221 Acknowledgments 230 Selected Bibliography 231 About the Author 247 Index 249 iii This time-lapse photograph shows three of the various sweep positions that the AD-1's unique oblique wing could assume. -

Analysis of Mountain Wave 3D Wind Fields in the Andes Derived From
Analysis of mountain wave 3D wind fields in the Andes derived from high-altitude sailplane flights Rick Millane1, Ni Zhang1, Einar Enevoldson2 and James Murray2 [email protected] 1Department of Electrical and Computer Engineering University of Canterbury, Christchurch, New Zealand 2NASA Armstrong Flight Research Center, Edwards, CA, USA Abstract Mountain lee waves are of importance in meteorology since they produce drag that affects the general circula- tion, and can influence windstorms, clear-air turbulence and ozone abundance. Since mountain waves are used routinely by sailplane pilots, data collected during wave flights are potentially useful for studying the structure of mountain waves. We have previously described methods for determining 3D wind velocities in mountain waves from limited sailplane flight data. These methods are applied to data from a high-altitude sailplane flight in the lee of the Andes that reached an altitude of over 15,000 m, well into the stratosphere, allowing a unique kind of in-situ observation of stratospheric mountain waves. The derived wind fields show parts of the wave structure in the troposphere and the stratosphere, and are compared with other observational data. Thus, a minimally instrumented sailplane can provide useful data for mountain wave research. Introduction from the mountain range. For the case of these trapped waves in the troposphere, the wavelength is typically between 2 km Gravity waves are perturbations in the atmosphere that are and 20 km [1, 2]. The wave crests may be marked by station- driven by gravity and buoyancy [1, 2]. Net forces on a par- ary lenticular clouds where the rising air cools to the dew point. -
Lofty-Ambitions.Pdf
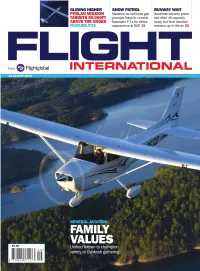
GENERAL AVIATION loFtY aMBItIons Visitors to EAA AirVenture will be the first to glimpse Perlan 2, a glider that aims to take sustained flight to more than 90,000ft and the edge of space HOWARD SLUTSKEN VANCOUVER The idea for the record flight attempt – ex- rent flowing over rocks: the air gets pushed pected to be staged next summer in Argentina into an invisible wave behind the range. aking its debut at EAA AirVenture – goes back 60 years, to when a young gliding Unique, lens-shaped lenticular clouds are 2015 is a new aircraft that is des- instructor called Einar Enevoldson volun- formed. The air inside the wave is smooth but tined to shatter records. The teered as line-crew in the US Air Force-fund- surrounding air can be violently turbulent. Airbus-branded Perlan Mission II ed Sierra Wave Project, in Bishop, California. Now an 83-year-old USAF and NASA M will use a little-known meteorological phe- Back then, the mountain wave weather phe- flight test veteran, Enevoldson is leading a nomenon called the Stratospheric Polar Night nomenon was little understood, and two Pratt- team of test pilots, programme managers and Jet to reach and fly at 90,000ft – piloted, Read PR-G1 gliders were flown into the wave meteorologists in an attempt to achieve the winged and sustained flight at over 27,400m. to gather meteorological and observational first unpowered flight to over 90,000ft. Perlan 2 will fly higher than the Lockheed data, reaching altitudes as high as 44,255ft. “You could see in the highest waves, it U-2 or SR-71, but it is not an exotically-shaped When strong winds cross a mountain seemed that there was some major motion or scramjet-powered superplane. -

The Smell of Kerosene a Test Pilot’S Odyssey
The Smell of Kerosene A Test Pilot’s Odyssey NASA SP 4108 By Donald L. Mallick with Peter W. Merlin The Smell of Kerosene A Test Pilot’s Odyssey The Smell of Kerosene tells the dramatic story of a NASA research pilot who logged over 11,000 flight hours in more than 125 types of aircraft. Donald Mallick gives the reader fascinating first- hand descriptions of his early naval flight training, carrier operations, and his research flying career with NASA and its predecessor agency, the National Advisory Committee for Aeronautics (NACA). Mallick joined the NACA as a research pilot at the Langley Memorial Aeronautical Laboratory at Hampton, Virginia, where he flew modified helicopters and jets, and witnessed the NACA’s evolution into the National Aeronautics and Space Administration. After transferring to the NASA Flight Research Center (now NASA Dryden Flight Research Center) at Edwards, California, he became involved with projects that further pushed the boundaries of aerospace technology. These included the giant delta-winged XB-70 supersonic research airplane, the wingless M2-F1 lifting body vehicle, and the triple-sonic YF-12 Blackbird. Mallick also test flew the Lunar Landing Research Vehicle (LLRV) and helped develop techniques used in training astronauts to land on the Moon. This book puts the reader in the pilot’s seat for a “day at the office” unlike any other. Wings of Gold The Smell of Kerosene: A Test Pilot’s Odyssey i Wings of Gold NASA SP 4108 The Smell of Kerosene: A Test Pilot’s Odyssey By Donald L. Mallick with Peter W. -

Projekt Perlan Aneb Větroněm Do Výšky 15 Kilometrů a Více Bezmotorové Létání Se Už Z Podstaty Liší Od Létání Na Motorových Letadlech
17. díl – Projekt Perlan aneb větroněm do výšky 15 kilometrů a více Bezmotorové létání se už z podstaty liší od létání na motorových letadlech. Povaha letu je výrazně více závislá na podmínkách podnebí, takže pilot se musí podřizovat aktuálním možnostem, které mu poskytují stoupavé proudy, a také musí kalkulovat s klouzavostí stroje, aby byl případně schopný doletět na nějaké letiště v okolí. Nezřídka se ale stává, že se to ne úplně zdaří, takže pilot nakonec se svým větroněm skončí v poli, odkud letadlo na letiště cestuje po zemi. Z toho lze nabýt dojmu, že větroně jsou pouze pro zábavu a pro radost, a že pro nějaké serióznější úkoly a výkony se nehodí. Že tomu tak není nám v roce 2006 dokázali piloti Einar Enevoldson a Steve Fossett, kteří ve větroni dosáhli rekordní výšky 15 460 metrů. Vzhledem k absenci motoru jsou pro piloty větroňů zcela zásadní znalosti meteorologie. A tak každý takový pilot zná termiku neboli stoupavé vzdušné proudy, kdy od země ohřátý vzduch stoupá vzhůru. Podaří-li se do takového vzdušného proudu vlétnout, může větroň nabírat výšku. S trochou zkušeností a štěstí dokáže pilot vyhledat stoupavý proud, tím získat výšku potřebnou ke zvýšení doletu daného klouzavostí stroje a nadále vyhledávat další stoupavé proudy. Tímto přeskakováním z jednoho „stoupáku“ na druhý je možné uskutečňovat bezmotorové lety o délce trvání několika hodin a urazit při tom vzdálenosti i několika stovek kilometrů. Dále lze využít stoupavého proudu vzduchu, který vzniká na návětrných stranách kopců, kde proud vzduchu naráží na kopec, a tato překážka jej stáčí směrem vzdůru. A konečně v okolí větších hor a pohoří mohou plachtaři využívat třetího meteorologického jevu. -

The Perlan 2 Glider Stances and Had Exactly This Epiphany Dr
thetical engineer, test pilot, and glider pilot who was in exactly these circum- The Perlan 2 Glider stances and had exactly this epiphany Dr. Daniel Johnson more than 25 years ago. But being a retired NASA test pilot, he did not have multiple millions of dollars to bring this vision into reality. On September 2, 2018, the Perlan 2 glider achieved a pressure altitude of 76,100 ft (that’s the altitude that mat- ters aerodynamically, though the lower GPS altitudes are used for records nowadays). Why can’t you fly a Schweizer 1-26 or a Ventus 3 to that altitude? Why build a bespoke glider for the task? The best answer is that if you want to succeed at any flying challenge, you’re best off flying an aircraft that is optimized for the task. Why? 1. The air is really wispy up there. The “Reynolds number” varies with the density (and viscosity) of the air be- Perlan 2 on the ramp in El Calafate, ready to tow out, worshipper genuflecting. ing flown through. At 100,000 ft, the (Photo by Daniel Johnson.) Reynolds numbers are bird-like rather than airplane-like. As you climb, the The design goal of Perlan 2 is to soar at What do you do? Of course, you true airspeed begins to approach the 90,000 ft above sea level. This is probably walk into the office belonging to the speed of sound, and the air wafting as high as any manned aircraft has ever bulletin board and have a detailed over the wings might exceed it – what flown, the actual record not documented. -

Dressing for Altitude U.S
Anybody who has watched many movies or Dennis R. Jenkins television shows has seen them—the ubiquitous About the Author silver suits worn by pilots as they explore the unknown. They are called pressure suits, and Dressing one can trace their lineage to Wiley Post or, Dressing perhaps, a bit earlier. There are two kinds of pressure suits: partial U.S. Aviation Pressure Suits–Wiley Post to Space Shuttle Pressure Suits–Wiley Post Aviation U.S. for Altitude pressure and full pressure. David Clark, once pointed out that these were not very good U.S. Aviation Pressure Suits–Wiley Post to Space Shuttle names, but they are the ones that stuck. In a partial-pressure suit, the counter-pressure is not as complete as in a full-pressure suit, but it Dennis R. Jenkins is placed so that shifts in body fl uids are kept One of the unsigned authors of an Air Force history of within reasonable limits. On the other hand, a the Wright Air Development Center wrote an epilogue full-pressure suit, which is an anthropomorphic that conveyed the awe associated with aviation pressure pressure vessel, creates an artifi cial environment suits during the mid-1950s. “The high point in the for the pilot. development of the altitude suit was reached on June for 17, 1954 when Maj. Arthur Murray rode the rocket- One type of pressure suit is not necessarily propelled X-1A to an altitude in excess of 90,000 feet. “better” than the other, and both partial-pressure When Murray reached the peak of his record setting and full-pressure suits are still in limited use fl ight, he was atop more than 97 percent of the atmo- around the world. -

Appendix 1 Internet Links
Appendix 1 Internet links This appendix takes the place of a list of references. These Internet links will take you to websites that discuss the subjects covered in this book. The links are broken down into categories and then listed in alphabetical order. They can be used to gather even more information about the subjects included; for example, if you want to know more about the meteorological science behind the Perlan Project’s decision to fl y out of Argentina for their sailplane altitude record attempts, you can go to their website. COMPANIES Air-Lock Inc. (Pressure suit connectors) www.airlockinc.com ATA Aerospace (Red Bull Stratos balloon launch and recovery) www.ata-aerospace.com Buran-Energia (Volga gondola) www.Buran-Energia.com David Clark Company (Pressure Suits including Stratos suit) www.davidclark.com Lockheed-Martin (U-2, A-12, M-21, SR-71) http://www.lockheedmartin.com/us/aeronautics/skunkworks.html Mountain High (Perlan Project oxygen systems) www.mhoxygen.com Micropore (Perlan Project CO2 scrubbers) www.extendair.com M. von Ehrenfried, Stratonauts: Pioneers Venturing into the Stratosphere, Springer Praxis Books, 187 DOI 10.1007/978-3-319-02901-6, © Springer International Publishing Switzerland 2014 188 Appendix 1 Perlan Project 501(c)(3) (Perlan Project Sailplane record attempts) www.perlanproject.com Please make donations to: [email protected] Red Bull Stratos (Felix Baumgartner fl ight) www.redbullstratos.com Sage Cheshire Aerospace (Red Bull Stratos capsule) http://sagecheshire.com Titan Dive Gear (Perlan Project oxygen rebreather) www.titandivegear.com Windward Performance Ltd. (Perlan Project Perlan II sailplane system) www.windward-performce.com Weather Extreme Ltd. -

The Egrett Towplane Resource
The Worl Dr. Daniel Johnson (All photos by author.) Every piece of good advice has a sad story behind it. — Einar Enevoldson Id's Saddest Towplane This article is based primarily on interviewing Einar, sup- nce upon a long time ago, I (DrDan) ran a little club plemented with information from Ed Warnock (CEO of the Owith my Blanik L-13. Occasionally a guy with a Piper Per/an Project), Jim Payne (chief pilot), Morgan Sandercock Pacer would tow for us. On a warm Wisconsin day, we'd (Australian engineer & pilot who did CPR on the project after climb only in thermals. We were exquisitely thankful for Steve Fossett was lost), Dan Gudgel (WxDan and amazing the farm fields surrounding the airport. aviator), Arne Vasenden (Egrett tow pilot), Mike Ma/is (en- At the other extreme is the Grob G-520 Egrett. It can gineer in perpetual motion and pilot), several others, and the haul your one-ton two-lardbutt ship at 75 kt and 1,500 ft ubiquitous Internet. All Jirst-person statements are quotes of per minute higher than you'd care to go - flight level 300, Einar. All errors are my own misunderstandings. 30,000 ft above sea level pressure - and then that eleva- tor slows down for the next two or three miles of altitude. B-A-D .... In August and September 2018, an Egrett flown by Arne Vasenden towed the Perlan 2 pressurized glider on 9 flights. The first, a test flight, released at only 11,000 ft. The other 8 tows reached from 40,000 to 45,100 ft - the highest tows ever undertaken (though the FAI Here's the problem: they have dis- meters (50,722 ft), with lift continu- doesn't keep track of such records).