A Glossary of Requirements Engineering Terminology Version 1.4 September 2012
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

The Experimental Determination of the Moment of Inertia of a Model Airplane Michael Koken [email protected]
The University of Akron IdeaExchange@UAkron The Dr. Gary B. and Pamela S. Williams Honors Honors Research Projects College Fall 2017 The Experimental Determination of the Moment of Inertia of a Model Airplane Michael Koken [email protected] Please take a moment to share how this work helps you through this survey. Your feedback will be important as we plan further development of our repository. Follow this and additional works at: http://ideaexchange.uakron.edu/honors_research_projects Part of the Aerospace Engineering Commons, Aviation Commons, Civil and Environmental Engineering Commons, Mechanical Engineering Commons, and the Physics Commons Recommended Citation Koken, Michael, "The Experimental Determination of the Moment of Inertia of a Model Airplane" (2017). Honors Research Projects. 585. http://ideaexchange.uakron.edu/honors_research_projects/585 This Honors Research Project is brought to you for free and open access by The Dr. Gary B. and Pamela S. Williams Honors College at IdeaExchange@UAkron, the institutional repository of The nivU ersity of Akron in Akron, Ohio, USA. It has been accepted for inclusion in Honors Research Projects by an authorized administrator of IdeaExchange@UAkron. For more information, please contact [email protected], [email protected]. 2017 THE EXPERIMENTAL DETERMINATION OF A MODEL AIRPLANE KOKEN, MICHAEL THE UNIVERSITY OF AKRON Honors Project TABLE OF CONTENTS List of Tables ................................................................................................................................................ -

Glossary - Cellbiology
1 Glossary - Cellbiology Blotting: (Blot Analysis) Widely used biochemical technique for detecting the presence of specific macromolecules (proteins, mRNAs, or DNA sequences) in a mixture. A sample first is separated on an agarose or polyacrylamide gel usually under denaturing conditions; the separated components are transferred (blotting) to a nitrocellulose sheet, which is exposed to a radiolabeled molecule that specifically binds to the macromolecule of interest, and then subjected to autoradiography. Northern B.: mRNAs are detected with a complementary DNA; Southern B.: DNA restriction fragments are detected with complementary nucleotide sequences; Western B.: Proteins are detected by specific antibodies. Cell: The fundamental unit of living organisms. Cells are bounded by a lipid-containing plasma membrane, containing the central nucleus, and the cytoplasm. Cells are generally capable of independent reproduction. More complex cells like Eukaryotes have various compartments (organelles) where special tasks essential for the survival of the cell take place. Cytoplasm: Viscous contents of a cell that are contained within the plasma membrane but, in eukaryotic cells, outside the nucleus. The part of the cytoplasm not contained in any organelle is called the Cytosol. Cytoskeleton: (Gk. ) Three dimensional network of fibrous elements, allowing precisely regulated movements of cell parts, transport organelles, and help to maintain a cell’s shape. • Actin filament: (Microfilaments) Ubiquitous eukaryotic cytoskeletal proteins (one end is attached to the cell-cortex) of two “twisted“ actin monomers; are important in the structural support and movement of cells. Each actin filament (F-actin) consists of two strands of globular subunits (G-Actin) wrapped around each other to form a polarized unit (high ionic cytoplasm lead to the formation of AF, whereas low ion-concentration disassembles AF). -

Analytic Geometry
Guide Study Georgia End-Of-Course Tests Georgia ANALYTIC GEOMETRY TABLE OF CONTENTS INTRODUCTION ...........................................................................................................5 HOW TO USE THE STUDY GUIDE ................................................................................6 OVERVIEW OF THE EOCT .........................................................................................8 PREPARING FOR THE EOCT ......................................................................................9 Study Skills ........................................................................................................9 Time Management .....................................................................................10 Organization ...............................................................................................10 Active Participation ...................................................................................11 Test-Taking Strategies .....................................................................................11 Suggested Strategies to Prepare for the EOCT ..........................................12 Suggested Strategies the Day before the EOCT ........................................13 Suggested Strategies the Morning of the EOCT ........................................13 Top 10 Suggested Strategies during the EOCT .........................................14 TEST CONTENT ........................................................................................................15 -
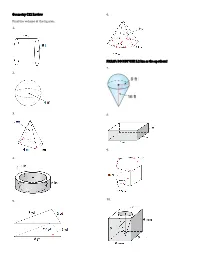
Geometry C12 Review Find the Volume of the Figures. 1. 2. 3. 4. 5. 6
Geometry C12 Review 6. Find the volume of the figures. 1. PREAP: DO NOT USE 5.2 km as the apothem! 7. 2. 3. 8. 9. 4. 10. 5. 11. 16. 17. 12. 18. 13. 14. 19. 15. 20. 21. A sphere has a volume of 7776π in3. What is the radius 33. Two prisms are similar. The ratio of their volumes is of the sphere? 8:27. The surface area of the smaller prism is 72 in2. Find the surface area of the larger prism. 22a. A sphere has a volume of 36π cm3. What is the radius and diameter of the sphere? 22b. A sphere has a volume of 45 ft3. What is the 34. The prisms are similar. approximate radius of the sphere? a. What is the scale factor? 23. The scale factor (ratio of sides) of two similar solids is b. What is the ratio of surface 3:7. What are the ratios of their surface areas and area? volumes? c. What is the ratio of volume? d. Find the volume of the 24. The scale factor of two similar solids is 12:5. What are smaller prism. the ratios of their surface areas and volumes? 35. The prisms are similar. 25. The scale factor of two similar solids is 6:11. What are a. What is the scale factor? the ratios of their surface areas and volumes? b. What is the ratio of surface area? 26. The ratio of the volumes of two similar solids is c. What is the ratio of 343:2197. What is the scale factor (ratio of sides)? volume? d. -

Unit 2 Cell Biology Page 1 Sub-Topics Include
Sub-Topics Include: 2.1 Cell structure 2.2 Transport across cell membranes 2.3 Producing new cells 2.4 DNA and the production of proteins 2.5 Proteins and enzymes 2.6 Genetic Engineering 2.7 Respiration 2.8 Photosynthesis Unit 2 Cell Biology Page 1 UNIT 2 TOPIC 1 1. Cell Structure 1. Types of organism Animals and plants are made up of many cells and so are described as multicellular organisms. Similar cells doing the same job are grouped together to form tissues. Animals and plants have systems made up of a number of organs, each doing a particular job. For example, the circulatory system is made up of the heart, blood and vessels such as arteries, veins and capillaries. Some fungi such as yeast are single celled while others such as mushrooms and moulds are larger. Cells of animals plants and fungi have contain a number of specialised structures inside their cells. These specialised structures are called organelles. Bacteria are unicellular (exist as single cells) and do not have organelles in the same way as other cells. 2. Looking at Organelles Some organelles can be observed by staining cells and viewing them using a light microscope. Other organelles are so small that they cannot be seen using a light microscope. Instead, they are viewed using an electron microscope, which provides a far higher magnification than a light microscope. Most organelles inside cells are surrounded by a membrane which is similar in composition (make-up) to the cell membrane. Unit 2 Cell Biology Page 2 3. A Typical Cell ribosome 4. -

Effective Field Theories, Reductionism and Scientific Explanation Stephan
To appear in: Studies in History and Philosophy of Modern Physics Effective Field Theories, Reductionism and Scientific Explanation Stephan Hartmann∗ Abstract Effective field theories have been a very popular tool in quantum physics for almost two decades. And there are good reasons for this. I will argue that effec- tive field theories share many of the advantages of both fundamental theories and phenomenological models, while avoiding their respective shortcomings. They are, for example, flexible enough to cover a wide range of phenomena, and concrete enough to provide a detailed story of the specific mechanisms at work at a given energy scale. So will all of physics eventually converge on effective field theories? This paper argues that good scientific research can be characterised by a fruitful interaction between fundamental theories, phenomenological models and effective field theories. All of them have their appropriate functions in the research process, and all of them are indispens- able. They complement each other and hang together in a coherent way which I shall characterise in some detail. To illustrate all this I will present a case study from nuclear and particle physics. The resulting view about scientific theorising is inherently pluralistic, and has implications for the debates about reductionism and scientific explanation. Keywords: Effective Field Theory; Quantum Field Theory; Renormalisation; Reductionism; Explanation; Pluralism. ∗Center for Philosophy of Science, University of Pittsburgh, 817 Cathedral of Learning, Pitts- burgh, PA 15260, USA (e-mail: [email protected]) (correspondence address); and Sektion Physik, Universit¨at M¨unchen, Theresienstr. 37, 80333 M¨unchen, Germany. 1 1 Introduction There is little doubt that effective field theories are nowadays a very popular tool in quantum physics. -
Light and Illumination
ChapterChapter 3333 -- LightLight andand IlluminationIllumination AAA PowerPointPowerPointPowerPoint PresentationPresentationPresentation bybyby PaulPaulPaul E.E.E. Tippens,Tippens,Tippens, ProfessorProfessorProfessor ofofof PhysicsPhysicsPhysics SouthernSouthernSouthern PolytechnicPolytechnicPolytechnic StateStateState UniversityUniversityUniversity © 2007 Objectives:Objectives: AfterAfter completingcompleting thisthis module,module, youyou shouldshould bebe ableable to:to: •• DefineDefine lightlight,, discussdiscuss itsits properties,properties, andand givegive thethe rangerange ofof wavelengthswavelengths forfor visiblevisible spectrum.spectrum. •• ApplyApply thethe relationshiprelationship betweenbetween frequenciesfrequencies andand wavelengthswavelengths forfor opticaloptical waves.waves. •• DefineDefine andand applyapply thethe conceptsconcepts ofof luminousluminous fluxflux,, luminousluminous intensityintensity,, andand illuminationillumination.. •• SolveSolve problemsproblems similarsimilar toto thosethose presentedpresented inin thisthis module.module. AA BeginningBeginning DefinitionDefinition AllAll objectsobjects areare emittingemitting andand absorbingabsorbing EMEM radiaradia-- tiontion.. ConsiderConsider aa pokerpoker placedplaced inin aa fire.fire. AsAs heatingheating occurs,occurs, thethe 1 emittedemitted EMEM waveswaves havehave 2 higherhigher energyenergy andand 3 eventuallyeventually becomebecome visible.visible. 4 FirstFirst redred .. .. .. thenthen white.white. LightLightLight maymaymay bebebe defineddefineddefined -

An Introduction to Supersymmetry
An Introduction to Supersymmetry Ulrich Theis Institute for Theoretical Physics, Friedrich-Schiller-University Jena, Max-Wien-Platz 1, D–07743 Jena, Germany [email protected] This is a write-up of a series of five introductory lectures on global supersymmetry in four dimensions given at the 13th “Saalburg” Summer School 2007 in Wolfersdorf, Germany. Contents 1 Why supersymmetry? 1 2 Weyl spinors in D=4 4 3 The supersymmetry algebra 6 4 Supersymmetry multiplets 6 5 Superspace and superfields 9 6 Superspace integration 11 7 Chiral superfields 13 8 Supersymmetric gauge theories 17 9 Supersymmetry breaking 22 10 Perturbative non-renormalization theorems 26 A Sigma matrices 29 1 Why supersymmetry? When the Large Hadron Collider at CERN takes up operations soon, its main objective, besides confirming the existence of the Higgs boson, will be to discover new physics beyond the standard model of the strong and electroweak interactions. It is widely believed that what will be found is a (at energies accessible to the LHC softly broken) supersymmetric extension of the standard model. What makes supersymmetry such an attractive feature that the majority of the theoretical physics community is convinced of its existence? 1 First of all, under plausible assumptions on the properties of relativistic quantum field theories, supersymmetry is the unique extension of the algebra of Poincar´eand internal symmtries of the S-matrix. If new physics is based on such an extension, it must be supersymmetric. Furthermore, the quantum properties of supersymmetric theories are much better under control than in non-supersymmetric ones, thanks to powerful non- renormalization theorems. -
A Guiding Vector Field Algorithm for Path Following Control Of
1 A guiding vector field algorithm for path following control of nonholonomic mobile robots Yuri A. Kapitanyuk, Anton V. Proskurnikov and Ming Cao Abstract—In this paper we propose an algorithm for path- the integral tracking error is uniformly positive independent following control of the nonholonomic mobile robot based on the of the controller design. Furthermore, in practice the robot’s idea of the guiding vector field (GVF). The desired path may be motion along the trajectory can be quite “irregular” due to an arbitrary smooth curve in its implicit form, that is, a level set of a predefined smooth function. Using this function and the its oscillations around the reference point. For instance, it is robot’s kinematic model, we design a GVF, whose integral curves impossible to guarantee either path following at a precisely converge to the trajectory. A nonlinear motion controller is then constant speed, or even the motion with a perfectly fixed proposed which steers the robot along such an integral curve, direction. Attempting to keep close to the reference point, the bringing it to the desired path. We establish global convergence robot may “overtake” it due to unpredictable disturbances. conditions for our algorithm and demonstrate its applicability and performance by experiments with real wheeled robots. As has been clearly illustrated in the influential paper [11], these performance limitations of trajectory tracking can be Index Terms—Path following, vector field guidance, mobile removed by carefully designed path following algorithms. robot, motion control, nonlinear systems Unlike the tracking approach, path following control treats the path as a geometric curve rather than a function of I. -

Two-Dimensional Rotational Kinematics Rigid Bodies
Rigid Bodies A rigid body is an extended object in which the Two-Dimensional Rotational distance between any two points in the object is Kinematics constant in time. Springs or human bodies are non-rigid bodies. 8.01 W10D1 Rotation and Translation Recall: Translational Motion of of Rigid Body the Center of Mass Demonstration: Motion of a thrown baton • Total momentum of system of particles sys total pV= m cm • External force and acceleration of center of mass Translational motion: external force of gravity acts on center of mass sys totaldp totaldVcm total FAext==mm = cm Rotational Motion: object rotates about center of dt dt mass 1 Main Idea: Rotation of Rigid Two-Dimensional Rotation Body Torque produces angular acceleration about center of • Fixed axis rotation: mass Disc is rotating about axis τ total = I α passing through the cm cm cm center of the disc and is perpendicular to the I plane of the disc. cm is the moment of inertial about the center of mass • Plane of motion is fixed: α is the angular acceleration about center of mass cm For straight line motion, bicycle wheel rotates about fixed direction and center of mass is translating Rotational Kinematics Fixed Axis Rotation: Angular for Fixed Axis Rotation Velocity Angle variable θ A point like particle undergoing circular motion at a non-constant speed has SI unit: [rad] dθ ω ≡≡ω kkˆˆ (1)An angular velocity vector Angular velocity dt SI unit: −1 ⎣⎡rad⋅ s ⎦⎤ (2) an angular acceleration vector dθ Vector: ω ≡ Component dt dθ ω ≡ magnitude dt ω >+0, direction kˆ direction ω < 0, direction − kˆ 2 Fixed Axis Rotation: Angular Concept Question: Angular Acceleration Speed 2 ˆˆd θ Object A sits at the outer edge (rim) of a merry-go-round, and Angular acceleration: α ≡≡α kk2 object B sits halfway between the rim and the axis of rotation. -
Chapter 13 Protein Structure Learning Objectives
Chapter 13 Protein structure Learning objectives Upon completing this material you should be able to: ■ understand the principles of protein primary, secondary, tertiary, and quaternary structure; ■use the NCBI tool CN3D to view a protein structure; ■use the NCBI tool VAST to align two structures; ■explain the role of PDB including its purpose, contents, and tools; ■explain the role of structure annotation databases such as SCOP and CATH; and ■describe approaches to modeling the three-dimensional structure of proteins. Outline Overview of protein structure Principles of protein structure Protein Data Bank Protein structure prediction Intrinsically disordered proteins Protein structure and disease Overview: protein structure The three-dimensional structure of a protein determines its capacity to function. Christian Anfinsen and others denatured ribonuclease, observed rapid refolding, and demonstrated that the primary amino acid sequence determines its three-dimensional structure. We can study protein structure to understand problems such as the consequence of disease-causing mutations; the properties of ligand-binding sites; and the functions of homologs. Outline Overview of protein structure Principles of protein structure Protein Data Bank Protein structure prediction Intrinsically disordered proteins Protein structure and disease Protein primary and secondary structure Results from three secondary structure programs are shown, with their consensus. h: alpha helix; c: random coil; e: extended strand Protein tertiary and quaternary structure Quarternary structure: the four subunits of hemoglobin are shown (with an α 2β2 composition and one beta globin chain high- lighted) as well as four noncovalently attached heme groups. The peptide bond; phi and psi angles The peptide bond; phi and psi angles in DeepView Protein secondary structure Protein secondary structure is determined by the amino acid side chains.