Statistical Mechanics of Polymer Stretching
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ideal Chain Conformations and Statistics
ENAS 606 : Polymer Physics Chinedum Osuji 01.24.2013:HO2 Ideal Chain Conformations and Statistics 1 Overview Consideration of the structure of macromolecules starts with a look at the details of chain level chemical details which can impact the conformations adopted by the polymer. In the case of saturated carbon ◦ backbones, while maintaining the desired Ci−1 − Ci − Ci+1 bond angle of 112 , the placement of the final carbon in the triad above can occur at any point along the circumference of a circle, defining a torsion angle '. We can readily recognize the energetic differences as a function this angle, U(') such that there are 3 minima - a deep minimum corresponding the the trans state, for which ' = 0 and energetically equivalent gauche− and gauche+ states at ' = ±120 degrees, as shown in Fig 1. Figure 1: Trans, gauche- and gauche+ configurations, and their energetic sates 1.1 Static Flexibility The static flexibility of the chain in equilibrium is determined by the difference between the levels of the energy minima corresponding the gauche and trans states, ∆. If ∆ < kT , the g+, g− and t states occur with similar probability, and so the chain can change direction and appears as a random coil. If ∆ takes on a larger value, then the t conformations will be enriched, so the chain will be rigid locally, but on larger length scales, the eventual occurrence of g+ and g− conformations imparts a random conformation. Overall, if we ignore details on some length scale smaller than lp, the persistence length, the polymer appears as a continuous flexible chain where 1 lp = l0 exp(∆/kT ) (1) where l0 is something like a monomer length. -

Analogies in Polymer Physics
Crimson Publishers Opinion Wings to the Research Analogies in Polymer Physics Sergey Panyukov* P N Lebedev Physics Institute, Russian Academy of Sciences, Russia Opinion Traditional methods for describing long polymer chains are so different from classical solid-state physics methods that it is difficult for scientists from different fields to find a seminar, Academician Ginzburg (not yet a Nobel laureate) got up and left the room: “This is common language. When I reported on my first work on polymer physics at a general physical not physics”. “Phew, what a nasty thing!”-this was a short commentary on another polymer work of the well-known theoretical physicist in the solid-state field. Of course, practical needs and the very time have somewhat changed the attitude towards the physics of polymers. But and slang of other areas of physics. even now, the best way to bury your work in polymer physics is to directly use the methods *Corresponding author: Sergey in elegant (or not so) analytical formulas, are replaced by the charts generated by computer Over the past fifty years, the methods of physics have changed a lot. New ideas, packaged simulations for carefully selected system parameters. People have learned to simulate RussiaPanyukov, P N Lebedev Physics Institute, Russian Academy of Sciences, Moscow, anything if they can allocate enough money for new computer clusters. But unfortunately, this Submission: does not always give a deeper understanding of physics, for which it is traditionally sufficient Published: July 06, 2020 to formulate a simplified model of a “spherical horse in a vacuum”. Complicate is simple, July 15, 2020 simplify is difficult, as Meyer’s law states. -

Properties of Two-Dimensional Polymers
Macromolecules 1982,15, 549-553 549 The squared frequencies uA2are obtained from the ei- (4) Flory, P. J. "Statistical Mechanics of Chain Molecules"; In- genvalues Of this matrix described in the text* terscience: New York, 1969; p 315. (5) Volkenstein,M. V. &Configurational Statistics of polymeric for N = 3 and 4 will be found in ref 7. Chains" (translated from the Russian edition by S. N. Ti- masheff and M. J. Timasheff);Interscience: New York, 1963; References and Notes p 450. (1) Weiner, J. H.; Perchak, D. Macromolecules 1981, 14, 1590. (6) Frenkel, J. "Kinetic Theory of Liquids"; Oxford University (2) Weiner, J. H., Macromolecules, preceding paper in this issue. Press: London, 1946, Dover reprint, 1955; pp 474-476. (3) G6, N.; Scheraga, H. A. Macromolecules 1976, 9, 535. (7) Perchak, D. Doctoral Dissertation, Brown University, 1981. Properties of Two-Dimensional Polymers Jan Tobochnik and Itzhak Webman* Department of Mathematics, Rutgers, The State University, New Brunswick, New Jersey 08903 Joel L. Lebowitzt Institute for Advanced Study, Princeton, New Jersey 08540 M. H. Kalos Courant Institute of Mathematical Sciences, New York university, New York, New York 10012. Received August 3, 1981 ABSTRACT: We have performed a series of Monte Carlo simulations for a two-dimensional polymer chain with monomers interacting via a Lennard-Jones potential. An analysis of a mean field theory, based on approximating the free energy as the sum of an elastic part and a fluid part, shows that in two dimensions there is a sharp collapse transition, at T = 0, but that there is no ideal or quasi-ideal behavior at the transition as there is in three dimensions. -
Polymer and Softmatter Physics
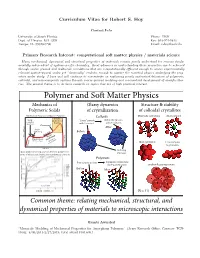
Curriculum Vitae for Robert S. Hoy Contact Info University of South Florida Phone: TBD Dept. of Physics, ISA 4209 Fax: 813-974-5813 Tampa, FL 33620-5700 Email: [email protected] Primary Research Interest: computational soft matter physics / materials science Many mechanical, dynamical and structural properties of materials remain poorly understood for reasons funda- mentally independent of system-specific chemistry. Great advances in understanding these properties can be achieved through coarse-grained and multiscale simulations that are computationally efficient enough to access experimentally relevant spatiotemporal scales yet \chemically" realistic enough to capture the essential physics underlying the prop- erties under study. I have and will continue to concentrate on explaining poorly-understood behaviors of polymeric, colloidal, and nanocomposite systems through coarse-grained modeling and concomitant development of analytic theo- ries. The general theme is to do basic research on topics that are of high practical interest. Polymer and So Matter Physics Mechanics of Glassy dynamics Structure & stability Polymeric Solids of crystallization of colloidal crystallites Mechanical Response of Ductile Polymers Colloids Maximally contacting Most compact %%%%'..3$;, %%!"#$%& <4%#3)*..% “Loose” particle Slides into groove, "$-)/)'*0+ ,,,:#6"=# (1$$2(%#1 with 1 contact adds 3 contacts !"#$$#%&"$' After %%&'")*+ &03'$+*+4 : Before 6").'#"$ )$.7#,8,9 !"#$%&'"$(( ,,,2*3("4, '$()*"+,-$./ 5(3%#4"46& VWUHVV DŽ 1 0$./ %%"$-)/)'*0+% Most symmetric Least -
Introduction to Polymer Physics
Ulrich Eisele Introduction to Polymer Physics With 148 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo HongKong Table of Contents Part I The Mechanics of Linear Deformation of Polymers 1 Object and Aims of Polymer Physics 3 2 Mechanical Relaxation in Polymers 5 2.1 Basic Continuum Mechanics S 2.1.1 Stress and Strain Tensors 5 2.1.2 Basic Laws of Continuum Mechanics 5 2.2 Relaxation and Creep Experiments on Polymers 8 2.2.1 Creep Experiment 8 2.2.2 Relaxation Experiment 9 2.2.3 Basic Law for Relaxation and Creep 10 2.3 Dynamic Relaxation Experiments 11 2.4 Technical Measures for Damping 12 2.4.1 Energy Dissipation Under Defined Load Conditions ! 12 2.4.2 Rebound Elasticity 15 3 Simple Phenomenological Models 17 3.1 Maxwell's Model 17 3.2 Kelvin-Voigt Model 18 3.3 Relaxation and Retardation Spectra 20 3.4 Approximate Determination of Relaxation Spectra 22 3.4.1 Method of Schwarzl and Stavermann 22 3.4.2 Method According to Ferry and Williams 24 4 Molecular Models of Relaxation Behavior 26 4.1 Simple Jump Model 26 4.2 Change of Position in Terms of a Potential Model 27 4.3 Viscosity in Terms of the Simple Jump Model 29 4.4 Determining the Energy of Activation by Experiment 30 4.5 Kink Model 32 5 Glass Transition 35 5.1 Thermodynamic Description 35 5.2 Free Volume Theory 36 5.3 Williams, Landel and Ferry Relationship 38 5.4 Time-Temperature Superposition Principle 40 5.5 Increment Method for the Determination of the Glass Transition Temperature 43 VIII Table of Contents 5.6 Glass Transitions of Copolymers 45 y 5.7 Dependence -
![Arxiv:1703.10946V2 [Physics.Comp-Ph] 20 Aug 2018](https://docslib.b-cdn.net/cover/4128/arxiv-1703-10946v2-physics-comp-ph-20-aug-2018-1904128.webp)
Arxiv:1703.10946V2 [Physics.Comp-Ph] 20 Aug 2018
A18.04.0117 Dynamical structure of entangled polymers simulated under shear flow Airidas Korolkovas,1, 2 Philipp Gutfreund,1 and Max Wolff2 1)Institut Laue-Langevin, 71 rue des Martyrs, 38000 Grenoble, France 2)Division for Material Physics, Department for Physics and Astronomy, Lägerhyddsvägen 1, 752 37 Uppsala, Swedena) (Dated: 21 August 2018) The non-linear response of entangled polymers to shear flow is complicated. Its current understanding is framed mainly as a rheological description in terms of the complex viscosity. However, the full picture requires an assessment of the dynamical structure of individual polymer chains which give rise to the macroscopic observables. Here we shed new light on this problem, using a computer simulation based on a blob model, extended to describe shear flow in polymer melts and semi-dilute solutions. We examine the diffusion and the intermediate scattering spectra during a steady shear flow. The relaxation dynamics are found to speed up along the flow direction, but slow down along the shear gradient direction. The third axis, vorticity, shows a slowdown at the short scale of a tube, but reaches a net speedup at the large scale of the chain radius of gyration. arXiv:1703.10946v2 [physics.comp-ph] 20 Aug 2018 a)Electronic mail: [email protected] 1 I. INTRODUCTION FIG. 1: A simulation box with C = 64 chains under shear rate Wi = 32. Every chain has N = 512 blobs, or degrees of freedom. The radius of the blob defines the length scale λ. For visual clarity, the diameter of the plotted tubes is set to λ as well. -

Development of the Semi-Empirical Equation of State for Square-Well Chain Fluid Based on the Statistical Associating Fluid Theory (SAFT)
Korean J. Chem. Eng., 17(1), 52-57 (2000) Development of the Semi-empirical Equation of State for Square-well Chain Fluid Based on the Statistical Associating Fluid Theory (SAFT) Min Sun Yeom, Jaeeon Chang and Hwayong Kim† School of Chemical Engineering, Seoul National University, Shinlim-dong, Kwanak-ku, Seoul 151-742, Korea (Received 25 August 1999 • accepted 29 October 1999) Abstract−A semi-empirical equation of state for the freely jointed square-well chain fluid is developed. This equation of state is based on Wertheim's thermodynamic perturbation theory (TPT) and the statistical associating fluid theory (SAFT). The compressibility factor and radial distribution function of square-well monomer are ob- tained from Monte Carlo simulations. These results are correlated using density expansion. In developing the equa- tion of state the exact analytical expressions are adopted for the second and third virial coefficients for the com- pressibility factor and the first two terms of the radial distribution function, while the higher order coefficients are determined from regression using the simulation data. In the limit of infinite temperature, the present equation of state and the expression for the radial distribution function are represented by the Carnahan-Starling equation of state. This semi-empirical equation of state gives at least comparable accuracy with other empirical equation of state for the square-well monomer fluid. With the new SAFT equation of state from the accurate expressions for the mo- nomer reference and covalent terms, we compare the prediction of the equation of state to the simulation results for the compressibility factor and radial distribution function of the square-well monomer and chain fluids. -
Introduction to Polymer Physics Lecture 5: Biopolymers Boulder Summer School July 9 – August 3, 2012
Introduction to polymer physics Lecture 5: Biopolymers Boulder Summer School July 9 – August 3, 2012 A.Grosberg New York University Colorado - paradise for scientists: If you need a theory… If your experiment does not work, and your data is so-so… • Theory Return & Exchange Policies: We will happily accept your return or exchange of … when accompanied by a receipt within 14 days … if it does not fit Polymers in living nature DNA RNA Proteins Lipids Polysaccha rides N Up to 1010 10 to 1000 20 to 1000 5 to 100 gigantic Nice Bioinformatics, Secondary Proteomics, Bilayers, ??? Someone physics elastic rod, structure, random/designed liposomes, has to start models ribbon, annealed heteropolymer,HP, membranes charged rod, branched, funnels, ratchets, helix-coil folding active brushes Uses Molecule Polysaccharides Lipids • See lectures by Sam Safran Proteins Ramachandran map Rotational isomer (not worm-like) flexibility Secondary structures: α While main chain is of helical shape, the side groups of aminoacid residues extend outward from the helix, which is why the geometry of α-helix is relatively universal, it is only weakly dependent on the sequence. In this illustration, for simplicity, only the least bulky side groups (glycine, side group H, and alanine, side group CH3) are used. The geometry of α-helix is such that the advance per one amino-acid residue along the helix axes is 0.15 nm, while the pitch (or advance along the axes per one full turn of the helix) is 0.54 nm. That means, the turn around the axes per one monomer equals 3600 * 0.15/0.54 = 1000; in other words, there are 3600/1000 =3.6 monomers per one helical turn. -
High Elasticity of Polymer Networks. Polymer Networks
High Elasticity of Polymer Networks. Polymer Networks. Polymer network consists of long polymer chains which are crosslinked with each other to form a giant three-dimensional macromolecule. All polymer networks except those who are in the glassy or partially crystalline states exhibit the property of high elasticity, i.e., the ability to undergo large reversible deformations at relatively small applied stress. High elasticity is the most specific property of polymer materials, it is connected with the most fundamental features of ideal chains considered in the previous lecture. In everyday life, highly elastic polymer materials are called rubbers. Molecular Nature of the High Elasticity. Elastic response of the crystalline solids is due to the change of the equilibrium interatomic distances under stress and therefore, the change in the internal energy of the crystal. Elasticity of rubbers is composed from the elastic responses of the chains crosslinked in the network sample. External stress changes the equilibrium end-to-end distance of a chain, and it thus adopts a less probable conformation. Therefore, the elasticity of rubbers is of purely entropic nature. Typical Stress-Strain Curves. for steel for rubbers А - the upper limit for stress-strain linearity, В - the upper limit for the reversibility of deformations, С - the fracture point. - the typical values of deformations ∆ l l are much larger for rubber; - the typical values of strain σ are much larger for steel; - the typical values of the Young modulus is enormously larger for steel than for rubber ( E 1 0 1 1 Pa and 1 0 5 − 1 0 6 Pa, respectively); - for steel linearity and reversibility are lost practically simultaneously, while for rubbers there is a very wide region of nonlinear reversible deformations; - for steel there is a wide region of plastic deformations (between points B and C) which is all but absent for rubbers. -

Introduction to Polymer Physics. 1 the References I Have Consulted Are the 2012 Lectures of Polymer Physics Pankaj Mehta from the 2012 Boulder Summer School
1 Introduction to Polymer Physics. 1 The references I have consulted are the 2012 lectures of Polymer physics Pankaj Mehta from the 2012 Boulder Summer School. Notes and videos available here https: March 8, 2021 //boulderschool.yale.edu/2012/ boulder-school-2012-lecture-notes. We have also used Chapter 1 of De In these notes, we will introduce the basic ideas of polymer physics – Gennes book, Scaling concepts in Poylmer with an emphasis on scaling theories and perhaps some hints at RG. Physics as well as Chapter 1 of M. Doi Introduction to Polymer Physics, this nice review on Flory theory https: //arxiv.org/abs/1308.2414, as well Introduction these notes from Levitov available at http://www.mit.edu/~levitov/8.334/ Polymers are just long floppy organic molecules. They are the basic notes/polymers_notes.pdf. building block of biological organisms and also have important in- dustrial applications. They occur in many forms and are an intense field of study, not only in physics but also in chemistry and chemical lectures. In these lectures, we will just touch on these ideas with an aim of understanding the basics of protein folding. A distinguishing feature of polymers is that because they are long and floppy, that entropic effects play a central role in the physics of polymers. A polymer molecule is a chain consisting of many elementary units called monomers. These monomers are attached to each other by covalent bonds. Generally, there are N monomers in a polymer, with N 1. This means that polymers behave like thermodynamic objects (see Figure 1). -

1 Biopolymers
“Lectures˙05˙and˙06˙and˙07” — 2007/11/10 — 12:34 — page 1 — #1 1 Biopolymers 1.1 Introduction to statistical mechanics 1.1.1 Free energy revisited Previously, we briefly introduced the concepts of free energy and entropy. Here, we will examine these concepts further and how they apply to biopolymers. To begin, we first need to introduce the idea of thermal fluctuations. Imagine a small particle floating in fluid. The particle will undergo Brownian motion, or random movements as it is randomly pushed around by the molecules around it. The mo- tion of the particle depends on the temperature: if the temperature is increased, the motion of the particle will also be increased. Like Brownian motion, polymers are subject to random molecular forces that cause them to ”wiggle”. These wig- gles are called thermal fluctuations. As temperature is increased, the polymers wiggle more. Why is this? Particle: Brownian motion Polymer: Thermal fluctuations Figure 1.1: Schematic depicting Brownian motion of a particle in fluid and thermal fluctuations of a polymer. Both are induced by random forces induced by the surrounding molecules. The conformation of a polymer is determined by its free energy. Specifically, poly- mers want to minimize their free energy. As we have seen already, the free energy is defined as ª = W ¡ TS. (1.1.1) 1 “Lectures˙05˙and˙06˙and˙07” — 2007/11/10 — 12:34 — page 2 — #2 1 Biopolymers W is referred to as the strain energy, or simply as the energy. T is temperature, and S is the entropy. We can see from 1.1.1 that a polymer can lower its free energy by lowering its energy W, or increasing its entropy S. -

Introduction to Polymer Physics Lecture 1 Boulder Summer School July – August 3, 2012
Introduction to polymer physics Lecture 1 Boulder Summer School July – August 3, 2012 A.Grosberg New York University Lecture 1: Ideal chains • Course outline: • This lecture outline: •Ideal chains (Grosberg) • Polymers and their •Real chains (Rubinstein) uses • Solutions (Rubinstein) •Scales •Methods (Grosberg) • Architecture • Closely connected: •Polymer size and interactions (Pincus), polyelectrolytes fractality (Rubinstein) , networks • Entropic elasticity (Rabin) , biopolymers •Elasticity at high (Grosberg), semiflexible forces polymers (MacKintosh) • Limits of ideal chain Polymer molecule is a chain: Examples: polyethylene (a), polysterene •Polymericfrom Greek poly- (b), polyvinyl chloride (c)… merēs having many parts; First Known Use: 1866 (Merriam-Webster); • Polymer molecule consists of many elementary units, called monomers; • Monomers – structural units connected by covalent bonds to form polymer; • N number of monomers in a …and DNA polymer, degree of polymerization; •M=N*mmonomer molecular mass. Another view: Scales: •kBT=4.1 pN*nm at • Monomer size b~Å; room temperature • Monomer mass m – (240C) from 14 to ca 1000; • Breaking covalent • Polymerization bond: ~10000 K; degree N~10 to 109; bondsbonds areare NOTNOT inin • Contour length equilibrium.equilibrium. L~10 nm to 1 m. • “Bending” and non- covalent bonds compete with kBT Polymers in materials science (e.g., alkane hydrocarbons –(CH2)-) # C 1-5 6-15 16-25 20-50 1000 or atoms more @ 25oC Gas Low Very Soft solid Tough and 1 viscosity viscous solid atm liquid liquid Uses Gaseous