Arxiv:1706.06551V2 [Cs.CL] 26 Jun 2017 Standing Challenge for the Development of Artificial Intelligence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

110% Gaming 220 Triathlon Magazine 3D World Adviser
110% Gaming 220 Triathlon Magazine 3D World Adviser Evolution Air Gunner Airgun World Android Advisor Angling Times (UK) Argyllshire Advertiser Asian Art Newspaper Auto Car (UK) Auto Express Aviation Classics BBC Good Food BBC History Magazine BBC Wildlife Magazine BIKE (UK) Belfast Telegraph Berkshire Life Bikes Etc Bird Watching (UK) Blackpool Gazette Bloomberg Businessweek (Europe) Buckinghamshire Life Business Traveller CAR (UK) Campbeltown Courier Canal Boat Car Mechanics (UK) Cardmaking and Papercraft Cheshire Life China Daily European Weekly Classic Bike (UK) Classic Car Weekly (UK) Classic Cars (UK) Classic Dirtbike Classic Ford Classic Motorcycle Mechanics Classic Racer Classic Trial Classics Monthly Closer (UK) Comic Heroes Commando Commando Commando Commando Computer Active (UK) Computer Arts Computer Arts Collection Computer Music Computer Shopper Cornwall Life Corporate Adviser Cotswold Life Country Smallholding Country Walking Magazine (UK) Countryfile Magazine Craftseller Crime Scene Cross Stitch Card Shop Cross Stitch Collection Cross Stitch Crazy Cross Stitch Gold Cross Stitcher Custom PC Cycling Plus Cyclist Daily Express Daily Mail Daily Star Daily Star Sunday Dennis the Menace & Gnasher's Epic Magazine Derbyshire Life Devon Life Digital Camera World Digital Photo (UK) Digital SLR Photography Diva (UK) Doctor Who Adventures Dorset EADT Suffolk EDGE EDP Norfolk Easy Cook Edinburgh Evening News Education in Brazil Empire (UK) Employee -

Pressreader Magazine Titles
PRESSREADER: UK MAGAZINE TITLES www.edinburgh.gov.uk/pressreader Computers & Technology Sport & Fitness Arts & Crafts Motoring Android Advisor 220 Triathlon Magazine Amateur Photographer Autocar 110% Gaming Athletics Weekly Cardmaking & Papercraft Auto Express 3D World Bike Cross Stitch Crazy Autosport Computer Active Bikes etc Cross Stitch Gold BBC Top Gear Magazine Computer Arts Bow International Cross Stitcher Car Computer Music Boxing News Digital Camera World Car Mechanics Computer Shopper Carve Digital SLR Photography Classic & Sports Car Custom PC Classic Dirt Bike Digital Photographer Classic Bike Edge Classic Trial Love Knitting for Baby Classic Car weekly iCreate Cycling Plus Love Patchwork & Quilting Classic Cars Imagine FX Cycling Weekly Mollie Makes Classic Ford iPad & Phone User Cyclist N-Photo Classics Monthly Linux Format Four Four Two Papercraft Inspirations Classic Trial Mac Format Golf Monthly Photo Plus Classic Motorcycle Mechanics Mac Life Golf World Practical Photography Classic Racer Macworld Health & Fitness Simply Crochet Evo Maximum PC Horse & Hound Simply Knitting F1 Racing Net Magazine Late Tackle Football Magazine Simply Sewing Fast Bikes PC Advisor Match of the Day The Knitter Fast Car PC Gamer Men’s Health The Simple Things Fast Ford PC Pro Motorcycle Sport & Leisure Today’s Quilter Japanese Performance PlayStation Official Magazine Motor Sport News Wallpaper Land Rover Monthly Retro Gamer Mountain Biking UK World of Cross Stitching MCN Stuff ProCycling Mini Magazine T3 Rugby World More Bikes Tech Advisor -

SYNDICATION Partner with Future OUR PURPOSE
SYNDICATION Partner With Future OUR PURPOSE We change people’s lives through “sharing our knowledge and expertise with others, making it easy and fun for them to do what they want ” CONTENTS ● The Future Advantage ● Syndication ● Our Portfolio ● Company History THE FUTURE ADVANTAGE Syndication Our award-winning specialist content can be used to further enrich the experience of your audience. Whilst at the same time saving money on editorial costs. We have 4 million+ images and 670,000 articles available for reuse. And with the support of our dedicated in-house licensing team, this content can be seamlessly adapted into a range of formats such as newspapers, magazines, websites and apps. The Core Benefits: ● Internationally transferable content for a global audience ● Saving costs on editorial budget so improving profit margin ● Immediate, automated and hassle-free access to content via our dedicated content delivery system – FELIX – or custom XML feeds ● Friendly, dynamic and forward-thinking licensing team available to discuss editorial requirements #1 ● Rich and diverse range of material to choose from ● Access to exclusive content written by in-house expert editorial teams Monthly Bookazines Global monthly Social Media magazines users Fans 78 2000+ 148m 52m Source: Google Search 2018 SYNDICATION ACCESS the entire Future portfolio of market leading brands within one agreement. Our in context licence gives you the ability to publish any number of features, reviews or interviews to boost the coverage and quality of your publications. News Features Interviews License the latest news from all our Our brands speak to the moovers and area’s of interest from a single shakers within every subject we write column to a Double Page spread. -
3D Mapping and Photogrammetry
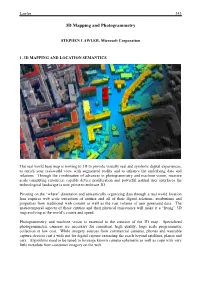
Lawler 343 3D Mapping and Photogrammetry STEPHEN LAWLER, Microsoft Corporation 1. 3D MAPPING AND LOCATION SEMANTICS The real world base map is moving to 3D to provide visually real and symbolic digital experiences, to enrich your real-world view with augmented reality and to enhance the underlying data and relations. Through the combination of advances in photogrammetry and machine vision, massive scale computing resources, capable device proliferation and powerful natural user interfaces the technological landscape is now prime to embrace 3D. Pivoting on the “where” dimension and semantically organizing data through a real world location lens requires web scale extraction of entities and all of their digital relations, attributions and properties from traditional web content as well as the vast volume of user generated data. The spatiotemporal aspects of these entities and their physical trajectories will make it a “living” 3D map evolving at the world’s course and speed. Photogrammetry and machine vision is essential to the creation of the 3D map. Specialized photogrammetric cameras are necessary for consistent, high quality, large scale programmatic collection at low cost. While imagery sources from commercial cameras, phones and wearable capture devices cast a wide net for digital capture extending the reach beyond satellites, planes and cars. Algorithms need to be tuned to leverage known camera ephemeris as well as cope with very little metadata from consumer imagery on the web. 344 Lawler Much of the value of the 3D world will be determined by the design and performance of 3D rendering engines. The rendering engine must provide the freedom to navigate high resolution 3D scenes at fluid frame rates. -

Complete Digital Magazine List Over 3,200 Titles
Complete Digital Magazine List Over 3,200 Titles $10 DINNERS (OR LESS!) (inside) interior design review .net CSS Design Essentials ¡Hola! Cocina ¡Hola! Especial Decoración ¡Hola! Especial Viajes ¡HOLA! FASHION ¡Hola! Fashion: Especial Alta Costura ¡Hola! Los Reyes Felipe VI y Letizia ¡Hola! Mexico ¡Hola! Prêt-À-Porter 0024 Horloges 01net 10 Minute Pilates 10 Minute Yoga Calm Highland Public Library Digital Magazine List - Last Updated 1.26.21 Page: 2 10 Week Fat Burn: Lose a Stone 100 All-Time Greatest Comics 100 Greatest Comedy Movies by Radio Times 100 greatest moments from 100 years of the Tour De France 100 Greatest Sci-Fi Characters 100 Greatest Thriller Movies by Radio Times 101 Home Sewing Ideas 101 Quick & Easy Crochet Makes 11 Freunde 1116 Design Tips 15 Minute Fitness: Busy Girls Guide 150 Thrifty Knits 200 Scrapbooking Ideas 220 Triathlon 220 Triathlon presents the Beginner's Guide to Triathlon 24H Brasil 25 Beautiful Homes 25 Years of the Hubble Space Telescope - from BBC Sky at Night Magazine 273 Papercraft & Card Ideas Highland Public Library Digital Magazine List - Last Updated 1.26.21 Page: 3 2nd セカンド 3D Art & Design Tips, Tricks & Fixes 3D Make And Print 3D World 400 Calories or Less: Easy Italian 45 Years on the MR&T 47 Creative Photography & Photoshop Projects 4x4 magazine 4x4 Magazine Australia 50 Baby Knits 50 Dream Rooms 50 Great British Locomotives 50 Greatest Mysteries in the Universe 50 Photo Projects Vol 2 50 Things No Man Should Be Without 50+ Decorating Ideas 500 Calorie Diet Complete Meal Planner 52 Bracelets -

(OR LESS!) Food & Cooking English One-Off (Inside) Interior Design
Publication Magazine Genre Frequency Language $10 DINNERS (OR LESS!) Food & Cooking English One-Off (inside) interior design review Art & Photo English Bimonthly . -

3Dckit-Alt-Manual
30 conSTRUCTIOn Hll C64, SPECTRUM & AMSTRAD CPC CONTENTS INTRODUCTION 2 REGISTRATION AND ACKNOWLEDGEMENTS 2 LOADING INSTRUCTIONS 3 INTRODUCTION TO FREESCAPE 6 INTRODUCTION TO THE EDITOR 11 THE USER INTERFACE 13 MOVEMENT AND VIEWPOINT CONTROLS 15 THE 3D KIT GAME 16 CREATING AND EDITING YOUR FIRST OBJECT 16 FILE MENU OPTIONS 17 GENERAL MENU OPTIONS 18 AREA MENU OPTIONS 21 CONDITION MENU OPTIONS 23 THE SHORTCUT ICONS 24 CONDITIONS - FREESCAPE COMMAND LANGUAGE (FCL) 28 EXAMPLES 41 VARIABLES - HOW TO USE VARIABLES 42 HANDLING VALUES GREATER THAN 255 43 APPENDIX 45 INTRODUCTION Manual by: Mandy Rodrigues Welcome to the 3D Construction Kit. We had often been asked when a Freescape Typesetting : Peter Carter of Starlight Graphics creator would be made, so here it is! It represents a total of four and a half years of Additional contributions : Andy Tait actual development, and many more man-years. Helen Andrew The program uses an advanced version of the Freescape 3D System, and will Anita Bradley allow you to design and create your own 3D Virtual Worlds. These could be your living Ursula Taylor room, your office, an ideal home or even a space station ! Thanks also to: Domark Software You may then walk or fly through the three dimensional environment as if you (j ii 3:f'(tf.U; '" is a registered trademark of Incentive Software . were actually there. Look around, up and down, move forward and back, go inside Program and documentation copyright © 1991 . New D1mens1on International buildings and even interact with objects you find. The facilities to make a fully fledged Limited, Zephyr One, Calleva Park, Aldermaston , Berkshire RG7 4QW. -

For Your Device Magazines
for your device Compatible with: Magazines With a Westerville Library card, you have access to over 200 digital magazines on the RBdigital Collection. See inside for: - Instructions for your computer - Access via the Westerville Library’s app Go to westervillelibrary.org/rbdigital. - List of available magazines 1 Select Borrow Magazines. 7 To find magazines that you have previously borrowed, select Checked Out. Select Create New Account. If requested, 2 To browse for new titles, enter your library card number. select Magazines. 8 To find a specific title or genre, select Filter. 3 Enter your email address and a password, then select Create Account. From your app store, download 4 this free app: RBdigital or OneClickdigital. 9 To choose a title, select Checkout. To sign in, enter your email address and 5 password (as previously chosen in step #3). To receive emails when the next issue is available, check the box above. Then select Read. The current issue will appear. 6 To view your options, select this menu: (For past issues, select View All Issues.) Magazines are downloaded and can be read without an internet connection. To remove a file, select Checked Out. In the right corner of the magazine cover, select the X. for your computer With a Westerville Library card, you have Magazines access to over 200 digital magazines on the RBdigital Collection. 1 Go to westervillelibrary.org/rbdigital. 5 Choose to Keep Browsing or Start Reading. Select Borrow Magazines. (To find magazines that you have previously borrowed, select My Collection.) 2 Select Create New Account. If requested, enter your library card number. -

Anticipated Acquisition by Future Plc of Miura (Holdings) Limited
Anticipated acquisition by Future plc of Miura (Holdings) Limited Decision on relevant merger situation and substantial lessening of competition ME/6624/16 The CMA’s decision on reference under section 33(1)of the Enterprise Act 2002 given on 7 October 2016. Full text of the decision published on 14 November 2016. Please note that [] indicates figures or text which have been deleted or replaced in ranges at the request of the parties for reasons of commercial confidentiality. CONTENTS Page SUMMARY ................................................................................................................. 2 ASSESSMENT ........................................................................................................... 4 Parties ................................................................................................................... 4 Transaction ........................................................................................................... 4 Jurisdiction ............................................................................................................ 4 Counterfactual....................................................................................................... 5 Overlap between the Parties ................................................................................. 6 Background ........................................................................................................... 7 Magazines – two-sided market ....................................................................... -
Game Development II Curriculum 5.0 Credits
Department of College and Career Readiness Game Development II Curriculum 5.0 Credits Unit One 1 | Page Game Development II Course Description This course provides an extension to the concepts covered in Game Development I, and will introduce students to 3D video game design, theory, development, and programming. Emphasis is placed on understanding and analyzing industry roles, 3D game genres, 3D game play, 3D art design, playability, storytelling, rule dynamics in a 3D world and what makes quality game. The course includes an introduction to 3D modeling, 3D Animation, coding in Python, 3D physics and creating a 3D game. Topics include geometric transformation, 3D object models, understanding what makes up a mesh, texturing, lighting, animation, creating physics, and creating interactivity in a 3D world. 2 | Page Game Development II Pacing Guide Unit Topic Suggested Timing Unit 1 Game Development I Review, with a Focus on 2D vs. 3D approx. 7 weeks Unit 2 Coding with Python approx. 9 weeks Unit 3 Concept and Preproduction Stages of Creating a 3D Game approx. 10 weeks Unit 4 Production, Postproduction, and Distribution Stages of Creating a 3D Game approx. 10 weeks 3 | Page Educational Technology Standards 8.1.12.A.2, 8.1.12.A.3, 8.1.12.B.2, 8.1.12.D.1, 8.1.12.F.1 Ø Technology Operations and Concepts § Collaborate in online courses, learning communities, social networks or virtual worlds to discuss a resolution to a problem or issue. Example of use within unit: Use online forums and social media to analyze the social affect videogames have had on the world. -

Super Mario™ 3D World
Super Mario™ 3D World 1 Importan t Informati on Gtget in Srdta te 2 Control lers and Sound Setti ngs 3 Oinl ne Feusat re 4 Note to Par ents and Guardi ans Srta tgin 5 Starti ng the Ga me 6 Char act er Sele cti on Moving aroun d the World Scr een 7 World Sncree 8 World Sc reen Controls Aedv nteur 9 Ceours Sncree WUP-P-ARDE-00 10 Playi ng t hrough C ours es 11 Sclpe ia Crsou se 12 Items 13 Share th e Adventur e! 14 Asss i t Plya 15 Ghost Mi i Characte rs 16 Mvii eers Action 17 Basic Acstion 18 Sclpe ia Aict on s 19 Peow r-sUp 20 M'ario s Forms Abou t T his Produ ct 21 Legal Nostice Tuero bl shtgoo in 22 Supp ort Inform ati on 1 Importan t Informati on Thank you for selecting the Super Mario™ 3D World game for the Wii U™ system. Important Information Please read this manual carefully before using this software. If the software will be used by children, the manual should be read and explained to them by an adult. Also, before using this software, please read the content of the Health and Safety Information application on the Wii U Menu. It contains important information that will help you enjoy this software. 2 Control lers and Sound Setti ngs The following controllers can be used with this software when they are paired with the console. Wii U Wii U Pro GamePad Controller Wii Remote + Wii Remote Nunchuk Wii Remote + Classic Controller Pro ◆ Up to four people can play together. -

Libby Magazine Titles As of January 2021
Libby Magazine Titles as of January 2021 $10 DINNERS (Or Less!) 3D World AD France (inside) interior design review 400 Calories or Less: Easy Italian AD Italia .net CSS Design Essentials 45 Years on the MR&T AD Russia ¡Hola! Cocina 47 Creative Photography & AD 安邸 ¡Hola! Especial Decoración Photoshop Projects Adega ¡Hola! Especial Viajes 4x4 magazine Adirondack Explorer ¡HOLA! FASHION 4x4 Magazine Australia Adirondack Life ¡Hola! Fashion: Especial Alta 50 Baby Knits ADMIN Network & Security Costura 50 Dream Rooms AdNews ¡Hola! Los Reyes Felipe VI y Letizia 50 Great British Locomotives Adobe Creative Cloud Book ¡Hola! Mexico 50 Greatest Mysteries in the Adobe Creative Suite Book ¡Hola! Prêt-À-Porter Universe Adobe Photoshop & Lightroom 0024 Horloges 50 Greatest SciFi Icons Workshops 3 01net 50 Photo Projects Vol 2 Adult Coloring Book: Birds of the 10 Minute Pilates 50 Things No Man Should Be World 10 Week Fat Burn: Lose a Stone Without Adult Coloring Book: Dragon 100 All-Time Greatest Comics 50+ Decorating Ideas World 100 Best Games to Play Right Now 500 Calorie Diet Complete Meal Adult Coloring Book: Ocean 100 Greatest Comedy Movies by Planner Animal Patterns Radio Times 52 Bracelets Adult Coloring Book: Stress 100 greatest moments from 100 5280 Magazine Relieving Animal Designs Volume years of the Tour De France 60 Days of Prayer 2 100 Greatest Sci-Fi Characters 60 Most Important Albums of Adult Coloring Book: Stress 100 Greatest Sci-Fi Characters Of NME's Lifetime Relieving Dolphin Patterns All Time 7 Jours Adult Coloring Book: Stress