Evidence That XTR Is More Secure Than Supersingular Elliptic Curve Cryptosystems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bilinear Map Cryptography from Progressively Weaker Assumptions
Full version of an extended abstract published in Proceedings of CT-RSA 2013, Springer-Verlag, Feb. 2013. Available from the IACR Cryptology ePrint Archive as Report 2012/687. The k-BDH Assumption Family: Bilinear Map Cryptography from Progressively Weaker Assumptions Karyn Benson, Hovav Shacham ∗ Brent Watersy University of California, San Diego University of Texas at Austin fkbenson, [email protected] [email protected] February 4, 2013 Abstract Over the past decade bilinear maps have been used to build a large variety of cryptosystems. In addition to new functionality, we have concurrently seen the emergence of many strong assump- tions. In this work, we explore how to build bilinear map cryptosystems under progressively weaker assumptions. We propose k-BDH, a new family of progressively weaker assumptions that generalizes the de- cisional bilinear Diffie-Hellman (DBDH) assumption. We give evidence in the generic group model that each assumption in our family is strictly weaker than the assumptions before it. DBDH has been used for proving many schemes secure, notably identity-based and functional encryption schemes; we expect that our k-BDH will lead to generalizations of many such schemes. To illustrate the usefulness of our k-BDH family, we construct a family of selectively secure Identity-Based Encryption (IBE) systems based on it. Our system can be viewed as a generalization of the Boneh-Boyen IBE, however, the construction and proof require new ideas to fit the family. We then extend our methods to produces hierarchical IBEs and CCA security; and give a fully secure variant. In addition, we discuss the opportunities and challenges of building new systems under our weaker assumption family. -

Circuit-Extension Handshakes for Tor Achieving Forward Secrecy in a Quantum World
Proceedings on Privacy Enhancing Technologies ; 2016 (4):219–236 John M. Schanck*, William Whyte, and Zhenfei Zhang Circuit-extension handshakes for Tor achieving forward secrecy in a quantum world Abstract: We propose a circuit extension handshake for 2. Anonymity: Some one-way authenticated key ex- Tor that is forward secure against adversaries who gain change protocols, such as ntor [13], guarantee that quantum computing capabilities after session negotia- the unauthenticated peer does not reveal their iden- tion. In doing so, we refine the notion of an authen- tity just by participating in the protocol. Such pro- ticated and confidential channel establishment (ACCE) tocols are deemed one-way anonymous. protocol and define pre-quantum, transitional, and post- 3. Forward Secrecy: A protocol provides forward quantum ACCE security. These new definitions reflect secrecy if the compromise of a party’s long-term the types of adversaries that a protocol might be de- key material does not affect the secrecy of session signed to resist. We prove that, with some small mod- keys negotiated prior to the compromise. Forward ifications, the currently deployed Tor circuit extension secrecy is typically achieved by mixing long-term handshake, ntor, provides pre-quantum ACCE security. key material with ephemeral keys that are discarded We then prove that our new protocol, when instantiated as soon as the session has been established. with a post-quantum key encapsulation mechanism, Forward secret protocols are a particularly effective tool achieves the stronger notion of transitional ACCE se- for resisting mass surveillance as they resist a broad curity. Finally, we instantiate our protocol with NTRU- class of harvest-then-decrypt attacks. -

Authentication in Key-Exchange: Definitions, Relations and Composition
Authentication in Key-Exchange: Definitions, Relations and Composition Cyprien Delpech de Saint Guilhem1;2, Marc Fischlin3, and Bogdan Warinschi2 1 imec-COSIC, KU Leuven, Belgium 2 Dept Computer Science, University of Bristol, United Kingdom 3 Computer Science, Technische Universit¨atDarmstadt, Germany [email protected], [email protected], [email protected] Abstract. We present a systematic approach to define and study authentication notions in authenti- cated key-exchange protocols. We propose and use a flexible and expressive predicate-based definitional framework. Our definitions capture key and entity authentication, in both implicit and explicit vari- ants, as well as key and entity confirmation, for authenticated key-exchange protocols. In particular, we capture critical notions in the authentication space such as key-compromise impersonation resis- tance and security against unknown key-share attacks. We first discuss these definitions within the Bellare{Rogaway model and then extend them to Canetti{Krawczyk-style models. We then show two useful applications of our framework. First, we look at the authentication guarantees of three representative protocols to draw several useful lessons for protocol design. The core technical contribution of this paper is then to formally establish that composition of secure implicitly authenti- cated key-exchange with subsequent confirmation protocols yields explicit authentication guarantees. Without a formal separation of implicit and explicit authentication from secrecy, a proof of this folklore result could not have been established. 1 Introduction The commonly expected level of security for authenticated key-exchange (AKE) protocols comprises two aspects. Authentication provides guarantees on the identities of the parties involved in the protocol execution. -

Implementation and Performance Evaluation of XTR Over Wireless Network
Implementation and Performance Evaluation of XTR over Wireless Network By Basem Shihada [email protected] Dept. of Computer Science 200 University Avenue West Waterloo, Ontario, Canada (519) 888-4567 ext. 6238 CS 887 Final Project 19th of April 2002 Implementation and Performance Evaluation of XTR over Wireless Network 1. Abstract Wireless systems require reliable data transmission, large bandwidth and maximum data security. Most current implementations of wireless security algorithms perform lots of operations on the wireless device. This result in a large number of computation overhead, thus reducing the device performance. Furthermore, many current implementations do not provide a fast level of security measures such as client authentication, authorization, data validation and data encryption. XTR is an abbreviation of Efficient and Compact Subgroup Trace Representation (ECSTR). Developed by Arjen Lenstra & Eric Verheul and considered a new public key cryptographic security system that merges high level of security GF(p6) with less number of computation GF(p2). The claim here is that XTR has less communication requirements, and significant computation advantages, which indicate that XTR is suitable for the small computing devices such as, wireless devices, wireless internet, and general wireless applications. The hoping result is a more flexible and powerful secure wireless network that can be easily used for application deployment. This project presents an implementation and performance evaluation to XTR public key cryptographic system over wireless network. The goal of this project is to develop an efficient and portable secure wireless network, which perform a variety of wireless applications in a secure manner. The project literately surveys XTR mathematical and theoretical background as well as system implementation and deployment over wireless network. -
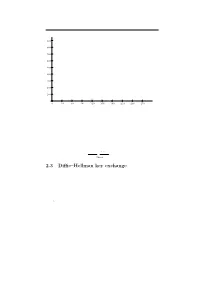
2.3 Diffie–Hellman Key Exchange
2.3. Di±e{Hellman key exchange 65 q q q q q q 6 q qq q q q q q q 900 q q q q q q q qq q q q q q q q q q q q q q q q q 800 q q q qq q q q q q q q q q qq q q q q q q q q q q q 700 q q q q q q q q q q q q q q q q q q q q q q q q q q qq q 600 q q q q q q q q q q q q qq q q q q q q q q q q q q q q q q q qq q q q q q q q q 500 q qq q q q q q qq q q q q q qqq q q q q q q q q q q q q q qq q q q 400 q q q q q q q q q q q q q q q q q q q q q q q q q 300 q q q q q q q q q q q q q q q q q q qqqq qqq q q q q q q q q q q q 200 q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q qq q q qq q q 100 q q q q q q q q q q q q q q q q q q q q q q q q q 0 q - 0 30 60 90 120 150 180 210 240 270 Figure 2.2: Powers 627i mod 941 for i = 1; 2; 3;::: any group and use the group law instead of multiplication. -

Elliptic Curves in Public Key Cryptography: the Diffie Hellman
Elliptic Curves in Public Key Cryptography: The Diffie Hellman Key Exchange Protocol and its relationship to the Elliptic Curve Discrete Logarithm Problem Public Key Cryptography Public key cryptography is a modern form of cryptography that allows different parties to exchange information securely over an insecure network, without having first to agree upon some secret key. The main use of public key cryptography is to provide information security in computer science, for example to transfer securely email, credit card details or other secret information between sender and recipient via the internet. There are three steps involved in transferring information securely from person A to person B over an insecure network. These are encryption of the original information, called the plaintext, transfer of the encrypted message, or ciphertext, and decryption of the ciphertext back into plaintext. Since the transfer of the ciphertext is over an insecure network, any spy has access to the ciphertext and thus potentially has access to the original information, provided he is able to decipher the message. Thus, a successful cryptosystem must be able encrypt the original message in such a way that only the intended receiver can decipher the ciphertext. The goal of public key cryptography is to make the problem of deciphering the encrypted message too difficult to do in a reasonable time (by say brute-force) unless certain key facts are known. Ideally, only the intended sender and receiver of a message should know these certain key facts. Any certain piece of information that is essential in order to decrypt a message is known as a key. -

DRAFT Special Publication 800-56A, Recommendation for Pair-Wise Key
The attached DRAFT document (provided here for historical purposes) has been superseded by the following publication: Publication Number: NIST Special Publication (SP) 800-56A Revision 2 Title: Recommendation for Pair-Wise Key-Establishment Schemes Using Discrete Logarithm Cryptography Publication Date: 05/13/2013 • Final Publication: https://doi.org/10.6028/NIST.SP.800-56Ar2 (which links to http://nvlpubs.nist.gov/nistpubs/SpecialPublications/NIST.SP.800-56Ar2.pdf). • Information on other NIST Computer Security Division publications and programs can be found at: http://csrc.nist.gov/ The following information was posted with the attached DRAFT document: Aug 20, 2012 SP 800-56 A Rev.1 DRAFT Recommendation for Pair-Wise Key-Establishment Schemes Using Discrete Logarithm Cryptography (Draft Revision) NIST announces the release of draft revision of Special Publication 800-56A, Recommendation for Pair-Wise Key Establishment Schemes Using Discrete Logarithm Cryptography. SP 800-56A specifies key-establishment schemes based on the discrete logarithm problem over finite fields and elliptic curves, including several variations of Diffie-Hellman and MQV key establishment schemes. The revision is made on the March 2007 version. The main changes are listed in Appendix D. Please submit comments to 56A2012rev-comments @ nist.gov with "Comments on SP 800-56A (Revision)" in the subject line. The comment period closes on October 31, 2012. NIST Special Publication 800-56A Recommendation for Pair-Wise August 2012 Key-Establishment Schemes Using Discrete Logarithm Cryptography (Draft Revision) Elaine Barker, Lily Chen, Miles Smid and Allen Roginsky C O M P U T E R S E C U R I T Y Abstract This Recommendation specifies key-establishment schemes based on the discrete logarithm problem over finite fields and elliptic curves, including several variations of Diffie-Hellman and MQV key establishment schemes. -
Study on the Use of Cryptographic Techniques in Europe
Study on the use of cryptographic techniques in Europe [Deliverable – 2011-12-19] Updated on 2012-04-20 II Study on the use of cryptographic techniques in Europe Contributors to this report Authors: Edward Hamilton and Mischa Kriens of Analysys Mason Ltd Rodica Tirtea of ENISA Supervisor of the project: Rodica Tirtea of ENISA ENISA staff involved in the project: Demosthenes Ikonomou, Stefan Schiffner Agreements or Acknowledgements ENISA would like to thank the contributors and reviewers of this study. Study on the use of cryptographic techniques in Europe III About ENISA The European Network and Information Security Agency (ENISA) is a centre of network and information security expertise for the EU, its member states, the private sector and Europe’s citizens. ENISA works with these groups to develop advice and recommendations on good practice in information security. It assists EU member states in implementing relevant EU leg- islation and works to improve the resilience of Europe’s critical information infrastructure and networks. ENISA seeks to enhance existing expertise in EU member states by supporting the development of cross-border communities committed to improving network and information security throughout the EU. More information about ENISA and its work can be found at www.enisa.europa.eu. Contact details For contacting ENISA or for general enquiries on cryptography, please use the following de- tails: E-mail: [email protected] Internet: http://www.enisa.europa.eu Legal notice Notice must be taken that this publication represents the views and interpretations of the au- thors and editors, unless stated otherwise. This publication should not be construed to be a legal action of ENISA or the ENISA bodies unless adopted pursuant to the ENISA Regulation (EC) No 460/2004 as lastly amended by Regulation (EU) No 580/2011. -

Public Key Infrastructure (PKI)
Public Key Infrastructure Public Key Infrastructure (PKI) Neil F. Johnson [email protected] http://ise.gmu.edu/~csis Assumptions • Understanding of – Fundamentals of Public Key Cryptosystems – Hash codes for message digests and integrity check – Digital Signatures Copyright 1999, Neil F. Johnson 1 Public Key Infrastructure Overview • Public Key Cryptosystems – Quick review – Cryptography – Digital Signatures – Key Management Issues • Certificates – Certificates Information – Certificate Authority – Track Issuing a Certificate • Putting it all together – PKI applications – Pretty Good Privacy (PGP) – Privacy Enhanced Mail (PEM) Public Key Cryptosystems – Quick Review • Key distribution problem of secret key systems – You must share the secret key with another party before you can initiate communication – If you want to communicate with n parties, you require n different keys • Public Key cryptosystems solve the key distribution problem in secret key systems (provided a reliable channel for communication of public keys can be implemented) • Security is based on the unfeasibility of computing B’s private key given the knowledge of – B’s public key, – chosen plaintext, and – maybe chosen ciphertext Copyright 1999, Neil F. Johnson 2 Public Key Infrastructure Key Distribution (n)(n-1) 2 Bob Bob Alice 1 Alice 2 Chris Chris 7 5 8 9 Ellie 3 Ellie 6 David 4 David Secret Key Distribution Directory of Public Keys (certificates) Public Key Cryptosystem INSECURE CHANNEL Plaintext Ciphertext Plaintext Encryption Decryption Algorithm Algorithm Bob’s PUBLIC -

Analysing and Patching SPEKE in ISO/IEC
1 Analysing and Patching SPEKE in ISO/IEC Feng Hao, Roberto Metere, Siamak F. Shahandashti and Changyu Dong Abstract—Simple Password Exponential Key Exchange reported. Over the years, SPEKE has been used in several (SPEKE) is a well-known Password Authenticated Key Ex- commercial applications: for example, the secure messaging change (PAKE) protocol that has been used in Blackberry on Blackberry phones [11] and Entrust’s TruePass end-to- phones for secure messaging and Entrust’s TruePass end-to- end web products. It has also been included into international end web products [16]. SPEKE has also been included into standards such as ISO/IEC 11770-4 and IEEE P1363.2. In the international standards such as IEEE P1363.2 [22] and this paper, we analyse the SPEKE protocol as specified in the ISO/IEC 11770-4 [24]. ISO/IEC and IEEE standards. We identify that the protocol is Given the wide usage of SPEKE in practical applications vulnerable to two new attacks: an impersonation attack that and its inclusion in standards, we believe a thorough allows an attacker to impersonate a user without knowing the password by launching two parallel sessions with the victim, analysis of SPEKE is both necessary and important. In and a key-malleability attack that allows a man-in-the-middle this paper, we revisit SPEKE and its variants specified in (MITM) to manipulate the session key without being detected the original paper [25], the IEEE 1363.2 [22] and ISO/IEC by the end users. Both attacks have been acknowledged by 11770-4 [23] standards. -

21. the Diffie-Hellman Problem
Chapter 21 The Diffie-Hellman Problem This is a chapter from version 2.0 of the book “Mathematics of Public Key Cryptography” by Steven Galbraith, available from http://www.math.auckland.ac.nz/˜sgal018/crypto- book/crypto-book.html The copyright for this chapter is held by Steven Galbraith. This book was published by Cambridge University Press in early 2012. This is the extended and corrected version. Some of the Theorem/Lemma/Exercise numbers may be different in the published version. Please send an email to [email protected] if youfind any mistakes. This chapter gives a thorough discussion of the computational Diffie-Hellman problem (CDH) and related computational problems. We give a number of reductions between computational problems, most significantly reductions from DLP to CDH. We explain self-correction of CDH oracles, study the static Diffie-Hellman problem, and study hard bits of the DLP and CDH. We always use multiplicative notation for groups in this chapter (except for in the Maurer reduction where some operations are specific to elliptic curves). 21.1 Variants of the Diffie-Hellman Problem We present some computational problems related to CDH, and prove reductions among them. The main result is to prove that CDH and Fixed-CDH are equivalent. Most of the results in this section apply to both algebraic groups (AG) and algebraic group quotients (AGQ) of prime orderr (some exceptions are Lemma 21.1.9, Lemma 21.1.16 and, later, Lemma 21.3.1). For the algebraic group quotientsG considered in this book then one can obtain all the results by lifting from the quotient to the covering groupG ′ and applying the results there. -
Lecture 19: Public-Key Cryptography (Diffie-Hellman Key Exchange & Elgamal Encryption)
Lecture 19: Public-key Cryptography (Diffie-Hellman Key Exchange & ElGamal Encryption) Public-key Cryptography Recall In private-key cryptography the secret-key sk is always established ahead of time The secrecy of the private-key cryptography relies on the fact that the adversary does not have access to the secret key sk For example, consider a private-key encryption scheme $ 1 The Alice and Bob generate sk Gen() ahead of time 2 Later, when Alice wants to encrypt and send a message to Bob, she computes the cipher-text c = Encsk(m) 3 The eavesdropping adversary see c but gains no additional information about the message m 4 Bob can decrypt the message me = Decsk(c) 5 Note that the knowledge of sk distinguishes Bob from the eavesdropping adversary Public-key Cryptography Perspective If jskj >jmj, then we can construct private-key encryption schemes (like, one-time pad) that is secure even against adversaries with unbounded computational power If jskj = O(jmj"), where " 2 (0; 1) is a constant, then we can construction private-key encryption schemes using pseudorandom generators (PRGs) What if, jskj = 0? That is, what if Alice and Bob never met? How is “Bob” any different from an “adversary”? Public-key Cryptography In this Lecture We shall introduce the Decisional Diffie-Hellmann (DDH) Assumption and the Diffie-Hellman key-exchange protocol, We shall introduce the El Gamal (public-key) Encryption Scheme, and Finally, abstract out the principal design principles learned. Public-key Cryptography Decisional Diffie-Hellman (DDH) Computational Hardness AssumptionI Let (G; ◦) be a group of size N that is generated by g.