The Advanced Aviation Weather System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Multiple-Platform and Multiple-Doppler Radar Observations of a Supercell Thunderstorm in South America During RELAMPAGO
AUGUST 2020 T R A P P E T A L . 3225 Multiple-Platform and Multiple-Doppler Radar Observations of a Supercell Thunderstorm in South America during RELAMPAGO a b c d ROBERT J. TRAPP, KAREN A. KOSIBA, JAMES N. MARQUIS, MATTHEW R. KUMJIAN, a b e a STEPHEN W. NESBITT, JOSHUA WURMAN, PAOLA SALIO, MAXWELL A. GROVER, Downloaded from http://journals.ametsoc.org/mwr/article-pdf/148/8/3225/4980676/mwrd200125.pdf by UNIVERSITY OF ILLINOIS user on 15 July 2020 b a PAUL ROBINSON, AND DEANNA A. HENCE a Department of Atmospheric Sciences, University of Illinois at Urbana–Champaign, Urbana, Illinois b Center for Severe Weather Research, Boulder, Colorado c Pacific Northwest National Laboratory, Richland, Washington, and University of Colorado Boulder, Boulder, Colorado d Department of Meteorology and Atmospheric Science, The Pennsylvania State University, University Park, Pennsylvania e Centro de Investigaciones del Mar y la Atmósfera, CONICET-UBA, and Departamento de Ciencias de la Atmósfera y los Océanos, UBA, UMI-IFAECI, CNRS-CONICET-UBA, Buenos Aires, Argentina (Manuscript received 20 April 2020, in final form 18 May 2020) ABSTRACT On 10 November 2018, during the RELAMPAGO field campaign in Argentina, South America, a thun- derstorm with supercell characteristics was observed by an array of mobile observing instruments, including three Doppler on Wheels radars. In contrast to the archetypal supercell described in the Glossary of Meteorology, the updraft rotation in this storm was rather short lived (;25 min), causing some initial doubt as to whether this indeed was a supercell. However, retrieved 3D winds from dual-Doppler radar scans were used to document a high spatial correspondence between midlevel vertical velocity and vertical vorticity in this storm, thus providing evidence to support the supercell categorization. -

Downloaded 10/04/21 02:12 PM UTC 874 MONTHLY WEATHER REVIEW VOLUME 147
MARCH 2019 G R I F F I N E T A L . 873 High-Temporal Resolution Observations of the 27 May 2015 Canadian, Texas, Tornado Using the Atmospheric Imaging Radar CASEY B. GRIFFIN School of Meteorology, and Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma DAVID J. BODINE AND JAMES M. KURDZO Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma ANDREW MAHRE AND ROBERT D. PALMER School of Meteorology, and Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma (Manuscript received 21 August 2018, in final form 16 January 2019) ABSTRACT On 27 May 2015, the Atmospheric Imaging Radar (AIR) collected high-temporal resolution radar ob- servations of an EF-2 tornado near Canadian, Texas. The AIR is a mobile, X-band, imaging radar that uses digital beamforming to collect simultaneous RHI scans while steering mechanically in azimuth to obtain rapid-update weather data. During this deployment, 208-by-808 (elevation 3 azimuth) sector volumes were collected every 5.5 s at ranges as close as 6 km. The AIR captured the late-mature and decaying stages of the tornado. Early in the deployment, the tornado had a radius of maximum winds (RMW) of 500 m and exhibited 2 maximum Doppler velocities near 65 m s 1. This study documents the rapid changes associated with the dissipation stages of the tornado. A 10-s resolution time–height investigation of vortex tilt and differential velocity DV is presented and illustrates an instance of upward vortex intensification as well as downward tornado decay. Changes in tornado intensity over periods of less than 30 s coincided with rapid changes in tornado diameter. -

Near-Surface Vortex Structure in a Tornado and in a Sub-Tornado-Strength Convective-Storm Vortex Observed by a Mobile, W-Band Radar During VORTEX2
VOLUME 141 MONTHLY WEATHER REVIEW NOVEMBER 2013 Near-Surface Vortex Structure in a Tornado and in a Sub-Tornado-Strength Convective-Storm Vortex Observed by a Mobile, W-Band Radar during VORTEX2 ,1 # @ ROBIN L. TANAMACHI,* HOWARD B. BLUESTEIN, MING XUE,* WEN-CHAU LEE, & & @ KRZYSZTOF A. ORZEL, STEPHEN J. FRASIER, AND ROGER M. WAKIMOTO * Center for Analysis and Prediction of Storms, and School of Meteorology, University of Oklahoma, Norman, Oklahoma # School of Meteorology, University of Oklahoma, Norman, Oklahoma @ National Center for Atmospheric Research, Boulder, Colorado & Microwave Remote Sensing Laboratory, University of Massachusetts, Amherst, Amherst, Massachusetts (Manuscript received 14 November 2012, in final form 22 May 2013) ABSTRACT As part of the Second Verification of the Origins of Rotation in Tornadoes Experiment (VORTEX2) field campaign, a very high-resolution, mobile, W-band Doppler radar collected near-surface (#200 m AGL) observations in an EF-0 tornado near Tribune, Kansas, on 25 May 2010 and in sub-tornado-strength vortices near Prospect Valley, Colorado, on 26 May 2010. In the Tribune case, the tornado’s condensation funnel dissipated and then reformed after a 3-min gap. In the Prospect Valley case, no condensation funnel was observed, but evidence from the highest-resolution radars in the VORTEX2 fleet indicates multiple, sub-tornado-strength vortices near the surface, some with weak-echo holes accompanying Doppler velocity couplets. Using high-resolution Doppler radar data, the authors document the full life cycle of sub- tornado-strength vortex beneath a convective storm that previously produced tornadoes. The kinematic evolution of these vortices, from genesis to decay, is investigated via ground-based velocity track display (GBVTD) analysis of the W-band velocity data. -
THE SHARED MOBILE ATMOSPHERIC RESEARCH and TEACHING RADAR a Collaboration to Enhance Research and Teaching
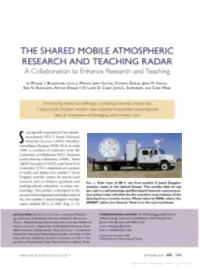
THE SHARED MOBILE ATMOSPHERIC RESEARCH AND TEACHING RADAR A Collaboration to Enhance Research and Teaching BY MICHAEL I. BIGGERSTAFF, LOUIS J. WICKER, JERRY GUYNES, CONRAD ZIEGLER, JERRY M. STRAKA, ERIK N. RASMUSSEN, ARTHUR DOGGETT IV, LARRY D. CAREY, JOHN L. SCHROEDER, AND CHRIS WEISS Overcoming numerous challenges, a unique partnership created two C-band mobile Doppler weather radars capable of accurately measuring both clear-air circulations and damaging winds in heavy rain. tarting with acquisition of two decom- missioned 1974 C-band National SWeather Service (NWS) Weather Surveillance Radars (WSR-74Cs) in early 1998, a coalition of scientists from the University of Oklahoma (OU), National Severe Storms Laboratory (NSSL), Texas A&M University (TAMU), and Texas Tech University (TTU) embarked on a project to build and deploy two mobile C-band Doppler weather radars for storm-scale research and to enhance graduate and FIG. I. Side view of SR-I, the first mobile C-band Doppler undergraduate education in radar me- weather radar in the United States. The smaller dish on top teorology. This project culminated in the the cab is a self-pointing satellite-based Internet communica- successful development and deployment of tion system that will allow for the real-time transmission of the the first mobile C-band Doppler weather data back to a remote server. Photo taken at NSSL where the radar, dubbed SR-1, in 2001 (Fig. 1). To SMART radars are housed. View is to the east-northeast. AFFILIATIONS: BIGGERSTAFF AND STRAKA—School of Meteorol- CORRESPONDING AUTHOR: Dr. Michael Biggerstaff, School ogy, University of Oklahoma, Norman, Oklahoma; WICKER AND of Meteorology, University of Oklahoma, 100 E. -

Tornado Basics
TORNADO BASICS NOAA/National Weather Service Tornado FAQ What is a tornado? According to the Glossary of Meteorology (AMS 2000), a tornado is "a violently rotating column of air, pendant from a cumuliform cloud or underneath a cumuliform cloud, and often (but not always) visible as a funnel cloud." Literally, in order for a vortex to be classified as a tornado, it must be in contact with the ground and the cloud base. Weather scientists haven't found it so simple in practice, however, to classify and define tornadoes. For example, the difference is unclear between an strong mesocyclone (parent thunderstorm circulation) on the ground, and a large, weak tornado. There is also disagreement as to whether separate touchdowns of the same funnel constitute separate tornadoes. It is well- known that a tornado may not have a visible funnel. Also, at what wind speed of the cloud-to-ground vortex does a tornado begin? How close must two or more different tornadic circulations become to qualify as a one multiple-vortex tornado, instead of separate tornadoes? There are no firm answers. BACK UP TO THE TOP How do tornadoes form? The classic answer -- "warm moist Gulf air meets cold Canadian air and dry air from the Rockies" -- is a gross oversimplification. Many thunderstorms form under those conditions (near warm fronts, cold fronts and drylines respectively), which never even come close to producing tornadoes. Even when the large-scale environment is extremely favorable for tornadic thunderstorms, as in an SPC "High Risk" outlook, not every thunderstorm spawns a tornado. The truth is that we don't fully understand. -

Downloaded 10/02/21 01:17 AM UTC
JULY 2005 L E E A N D WURMAN 2373 Diagnosed Three-Dimensional Axisymmetric Structure of the Mulhall Tornado on 3 May 1999 WEN-CHAU LEE National Center for Atmospheric Research, Boulder, Colorado JOSHUA WURMAN Center for Severe Weather Research, Boulder, Colorado (Manuscript received 16 June 2004, in final form 14 December 2004) ABSTRACT On 3 May 1999, an unusually large tornado that caused F4-level damage and killed several people was intercepted by the Doppler on Wheels (DOW) mobile radar near Mulhall, Oklahoma, from a range of 4 to 9 km, resulting in high-resolution volumetric data every 55 s up to 1.5-km altitude over a period of 14 min. For the first time, the evolution and three-dimensional structure of a tornado were deduced using the ground-based velocity track display (GBVTD) technique. After the circulation center was determined, the tangential wind and radial wind were derived from the GBVTD technique at each radius and height. In addition, the axisymmetric vertical velocity, angular momentum, vorticity, and perturbation pressure were deduced from the tangential and radial wind fields. This study focuses on the axisymmetric aspects of this tornado. The primary circulation of the Mulhall tornado consisted of an 84 m sϪ1 peak axisymmetric tangential wind with the radius of maximum wind (RMW) ranging from 500 to 1000 m. The secondary circulation exhibited a two-cell structure characterized by a central downdraft surrounded by an annular updraft near the RMW. The calculated maximum pressure deficit from a 3-km radius to the tornado center at 50-m altitude was Ϫ80 hPa. -
RADAR in ATMOSPHERIC SCIENCES and RELATED RESEARCH Current Systems, Emerging Technology, and Future Needs
RADAR IN ATMOSPHERIC SCIENCES AND RELATED RESEARCH Current Systems, Emerging Technology, and Future Needs BY HOWARD B. BLUESTEIN, ROBERT M. RAUBER, DONALD W. BURGESS, BRUCE ALBRECHT, SCOTT M. ELLIS, YVETTE P. RICHARDSON, DAVID P. JORGENSEN, STEphEN J. FRASIER, PHILLIP CHILSON, ROBERT D. PALMER, SANDRA E. YUTER, WEN-CHAU LEE, DAVID C. DOWELL, PAUL L. SMITH, PAUL M. MARKOWSKI, KATJA FRIEDRICH, AND TAmmY M. WECKWERTH Emerging radar technologies best suited to addressing key scientific questions and future problems are identified and discussed. o help its Lower Atmosphere Observing Facilities (LAOF) program provide researchers with instrumentation and T platforms, the National Science Foundation (NSF) con- vened a community workshop1 with the purpose of defining the problems of the next generation that will require radar technologies and to determine the suite of radars best suited to solving these problems. The workshop addressed a subset of the instruments2 mentioned by the National Research Council (2009) as being or eventually becoming essential operational facilities. Climate scientists have also recom- mended similar reviews of instrumentation, in part because “we may . need easily deployable short-term observational technologies to monitor potential abrupt changes or impor- tant regional trends” (National Research Council 2010). Based on presentations and discussions at the NSF work- shop (Figs. 1 and 2), we considered the following questions: 1 The workshop was held at the NCAR in Boulder, Colorado, from 27 to 29 November 2012. There were over 120 participants who repre- sented six countries (United States including Hawaii, Canada, France, Germany, Japan, and Taiwan) and three continents. Additional par- ticipants attended by web conferencing. -
A MOBILE, PHASED-ARRAY DOPPLER RADAR for the STUDY of SEVERE CONVECTIVE STORMS - Proquest 3/4/16, 3:09 PM
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Calhoun, Institutional Archive of the Naval Postgraduate School Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications Collection 2010-05 A mobile phased array Doppler radar for the study of severe convective storms Bluestein, Howard B. American Meteorology Society Bulletin of the American Meteorological Society, v. 91, no.5, May 2010, p. 570-586 http://hdl.handle.net/10945/48186 Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications Collection 2010-05 A mobile phased array Doppler radar for the study of severe convective storms Bluestein, Howard B. American Meteorology Society Bulletin of the American Meteorological Society, v. 91, no.5, May 2010, p. 570-586 http://hdl.handle.net/10945/48186 A MOBILE, PHASED-ARRAY DOPPLER RADAR FOR THE STUDY OF SEVERE CONVECTIVE STORMS - ProQuest 3/4/16, 3:09 PM 1Back to results More like this + A MOBILE, PHASED-ARRAY DOPPLER RADAR FOR THE STUDY OF SEVERE CONVECTIVE STORMS Bluestein, Howard B ; French, Michael N; PorStefanija, Ivan; Bluth, Robert T ; Knorr, Jeffrey B . Bulletin of the American Meteorological Society 91.5 (May 2010): 579. Full text Abstract/Details References 35 Abstract Translate (1999) found after inspecting Weather Surveillance Radar-1988 Doppler (WSR-88D) volume scans that some tornadic vortex signatures descend, whereas others appear in a column simultaneously. Since it takes -4-5 min to complete a volume scan (Crum and Alberty 1993), the latter finding might not hold for shorter time scales: A midlevel (~5 km AGL) vortex advected downward by a downdraft of -20 m s-1 for 4 min will descend ~5 km (i.e., down to the ground); with observations on a 4-5-min time scale, the descent would appear to be simultaneous. -

1999 Oklahoma Tornado Outbreak: 10-Year Retrospective
THE 1999 OKLAHOMA TORNADO OUTBREAK: 10-YEAR RETROSPECTIVE RMS Special Report INTRODUCTION With atmospheric conditions ideal for producing hail, straight-line winds, lightning, flash floods, and tornadoes, May is the most active month for severe convective storms in the U.S. At this time of year, potent, extra- tropical storms force the warm, moist air from the Gulf of Mexico far enough northward to clash with the cool, continental air mass over the U.S., producing an environment conducive to the most violent weather that can be found anywhere on Earth. May of 1999 proved to be an exceptionally destructive month in severe convective storm history. Beginning on May 3, a large upper-level trough over the Western U.S. allowed moisture rich air and intense wind shear to advect into Northern Texas, Oklahoma, and Southern Kansas, creating conditions ripe for severe weather. Nearly 70 tornadoes were reported on May 3 alone, including two dangerous, long-lived F4 and F5 tornadoes on the Fujita Scale that passed near Wichita, Kansas and Oklahoma City, Oklahoma, respectively (Figure 1). May 4–6 brought over 60 additional tornadoes to areas of the Southern Plains, the Tennessee Valley, and South Carolina. The events of May 3–6 became known as the 1999 Oklahoma Tornado Outbreak, costing many lives as they wreaked havoc throughout the region. The strongest of these events, a large and destructive F5 tornado that touched down near Oklahoma City on the evening of May 3, caused $1.3 billion in damage in 2009 dollars (Brooks and Doswell, 2001). Adjusted for inflation, it remains the costliest tornado in U.S. -
Extended Abstract AMS 89 Th Annual Meeting 11�15 January 2009, Phoenix, AZ
Extended abstract AMS 89 th Annual Meeting 11-15 January 2009, Phoenix, AZ 14.3 EVALUATION OF A NEW MULTIPLE-DOPPLER TORNADO DETECTION AND CHARACTERIZATION TECHNIQUE USING REAL RADAR OBSERVATIONS Corey K. Potvin* ,1 , Alan Shapiro 1, Tian-You Yu 2, and Jidong Gao 3 1School of Meteorology, University of Oklahoma, Norman, OK 2School of Electrical and Computer Engineering, University of Oklahoma, Norman, OK 3Center for Analysis and Prediction of Storms, University of Oklahoma, Norman, OK 1. INTRODUCTION tive Adaptive Sensing of the Atmosphere; Mclaughlin et al. 2005; Brotzge et al. 2007) radar Since the implementation of the WSR-88D network to detect small-scale vortices and also to network, several algorithms have been developed provide vortex characteristic estimates which may to aid forecasters in real-time identification of in- improve tornado nowcasting. The vortex para- tense small and mesoscale vortices. The National meters are obtained by minimizing a cost function Severe Storms Laboratory (NSSL) Mesocyclone which measures the discrepancy between the ob- Detection Algorithm (MDA; Stumpf et al. 1998) served and model radial wind fields. By taking the was designed to alert forecasters to the presence translation of the system into account, the radar of supercell thunderstorms, which produce a large data can be used at their actual locations and portion of tornadoes in the United States. The times of acquisition. NSSL Tornado Detection Algorithm (TDA; Mitchell Tests of the technique using analytically- et al. 1998) calculates azimuthal shear of radial generated and numerically-simulated tornadic wind using adjacent radar resolution volumes, and wind fields can be found in Potvin et al. -

Tornado Alley” Documents Two Unprec- Edented Missions Seeking to Encounter One of Earth’S Most Awe-Inspiring Events—The Birth of a Tornado
Traversing the “severe weather capital of the world,” “Tornado Alley” documents two unprec- edented missions seeking to encounter one of Earth’s most awe-inspiring events—the birth of a tornado. Filmmaker Sean Casey’s personal quest to capture the birth of a tornado with a 70mm camera takes viewers on a breathtaking journey into the heart of the storm. A team of equally driven scientists, the VORTEX2 researchers, experience the relentless strength of nature’s elemental forces as they literally surround tornadoes and the supercell storms that form them, gathering the most comprehensive severe weather data ever collected. This science adventure reveals the beauty and the power of some of our planet’s most extreme—and least understood—weather phenomena. “Tornado Alley” showcases the teamwork that makes scientific discovery and advancement possible. In this case, an international team of scientists have joined together to pool their resources and efforts in an attempt to understand tornadogenesis—the birth of a tornado from a supercell storm cloud. They converge on the area of the United States known as Tornado Alley during the prime tornado seasons of 2009 and 2010. Learning Goals for K-12 Students: • To understand where Tornado Alley is located. • To understand the tools that scientists use to study tornadoes. • To understand how scientists work together to gather data, make observations, and draw conclusions about severe weather events. VORTEX2 “Tornado Alley” features the VORTEX2 scientific team as they work on their mission to capture information about how tornadoes form—the process called tornadogenesis. VORTEX2 was the largest and most ambitious effort ever made to understand tornadoes. -

American Meteorological Society 2020)
AUGUST 2020 T R A P P E T A L . 3225 Multiple-Platform and Multiple-Doppler Radar Observations of a Supercell Thunderstorm in South America during RELAMPAGO a b c d ROBERT J. TRAPP, KAREN A. KOSIBA, JAMES N. MARQUIS, MATTHEW R. KUMJIAN, a b e a STEPHEN W. NESBITT, JOSHUA WURMAN, PAOLA SALIO, MAXWELL A. GROVER, b a PAUL ROBINSON, AND DEANNA A. HENCE a Department of Atmospheric Sciences, University of Illinois at Urbana–Champaign, Urbana, Illinois b Center for Severe Weather Research, Boulder, Colorado c Pacific Northwest National Laboratory, Richland, Washington, and University of Colorado Boulder, Boulder, Colorado d Department of Meteorology and Atmospheric Science, The Pennsylvania State University, University Park, Pennsylvania e Centro de Investigaciones del Mar y la Atmósfera, CONICET-UBA, and Departamento de Ciencias de la Atmósfera y los Océanos, UBA, UMI-IFAECI, CNRS-CONICET-UBA, Buenos Aires, Argentina (Manuscript received 20 April 2020, in final form 18 May 2020) ABSTRACT On 10 November 2018, during the RELAMPAGO field campaign in Argentina, South America, a thun- derstorm with supercell characteristics was observed by an array of mobile observing instruments, including three Doppler on Wheels radars. In contrast to the archetypal supercell described in the Glossary of Meteorology, the updraft rotation in this storm was rather short lived (;25 min), causing some initial doubt as to whether this indeed was a supercell. However, retrieved 3D winds from dual-Doppler radar scans were used to document a high spatial correspondence between midlevel vertical velocity and vertical vorticity in this storm, thus providing evidence to support the supercell categorization.