Minkowski Spacetime
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Supplemental Lecture 5 Precession in Special and General Relativity
Supplemental Lecture 5 Thomas Precession and Fermi-Walker Transport in Special Relativity and Geodesic Precession in General Relativity Abstract This lecture considers two topics in the motion of tops, spins and gyroscopes: 1. Thomas Precession and Fermi-Walker Transport in Special Relativity, and 2. Geodesic Precession in General Relativity. A gyroscope (“spin”) attached to an accelerating particle traveling in Minkowski space-time is seen to precess even in a torque-free environment. The angular rate of the precession is given by the famous Thomas precession frequency. We introduce the notion of Fermi-Walker transport to discuss this phenomenon in a systematic fashion and apply it to a particle propagating on a circular orbit. In a separate discussion we consider the geodesic motion of a particle with spin in a curved space-time. The spin necessarily precesses as a consequence of the space-time curvature. We illustrate the phenomenon for a circular orbit in a Schwarzschild metric. Accurate experimental measurements of this effect have been accomplished using earth satellites carrying gyroscopes. This lecture supplements material in the textbook: Special Relativity, Electrodynamics and General Relativity: From Newton to Einstein (ISBN: 978-0-12-813720-8). The term “textbook” in these Supplemental Lectures will refer to that work. Keywords: Fermi-Walker transport, Thomas precession, Geodesic precession, Schwarzschild metric, Gravity Probe B (GP-B). Introduction In this supplementary lecture we discuss two instances of precession: 1. Thomas precession in special relativity and 2. Geodesic precession in general relativity. To set the stage, let’s recall a few things about precession in classical mechanics, Newton’s world, as we say in the textbook. -

A Short and Transparent Derivation of the Lorentz-Einstein Transformations
A brief and transparent derivation of the Lorentz-Einstein transformations via thought experiments Bernhard Rothenstein1), Stefan Popescu 2) and George J. Spix 3) 1) Politehnica University of Timisoara, Physics Department, Timisoara, Romania 2) Siemens AG, Erlangen, Germany 3) BSEE Illinois Institute of Technology, USA Abstract. Starting with a thought experiment proposed by Kard10, which derives the formula that accounts for the relativistic effect of length contraction, we present a “two line” transparent derivation of the Lorentz-Einstein transformations for the space-time coordinates of the same event. Our derivation make uses of Einstein’s clock synchronization procedure. 1. Introduction Authors make a merit of the fact that they derive the basic formulas of special relativity without using the Lorentz-Einstein transformations (LET). Thought experiments play an important part in their derivations. Some of these approaches are devoted to the derivation of a given formula whereas others present a chain of derivations for the formulas of relativistic kinematics in a given succession. Two anthological papers1,2 present a “two line” derivation of the formula that accounts for the time dilation using as relativistic ingredients the invariant and finite light speed in free space c and the invariance of distances measured perpendicular to the direction of relative motion of the inertial reference frame from where the same “light clock” is observed. Many textbooks present a more elaborated derivation of the time dilation formula using a light clock that consists of two parallel mirrors located at a given distance apart from each other and a light signal that bounces between when observing it from two inertial reference frames in relative motion.3,4 The derivation of the time dilation formula is intimately related to the formula that accounts for the length contraction derived also without using the LET. -

Mach's Principle: Exact Frame
MACH’S PRINCIPLE: EXACT FRAME-DRAGGING BY ENERGY CURRENTS IN THE UNIVERSE CHRISTOPH SCHMID Institute of Theoretical Physics, ETH Zurich CH-8093 Zurich, Switzerland We show that the dragging of axis directions of local inertial frames by a weighted average of the energy currents in the universe (Mach’s postulate) is exact for all linear perturbations of all Friedmann-Robertson-Walker universes. 1 Mach’s Principle 1.1 The Observational Fact: ’Mach zero’ The time-evolution of local inertial axes, i.e. the local non-rotating frame is experimentally determined by the spin axes of gyroscopes, as in inertial guidance systems in airplanes and satellites. This is true both in Newtonian physics (Foucault 1852) and in General Relativity. It is an observational fact within present-day accuracy that the spin axes of gyroscopes do not precess relative to quasars. This observational fact has been named ’Mach zero’, where ’zero’ designates that this fact is not yet Mach’s principle, it is just the observational starting point. — There is an extremely small dragging effect by the rotating Earth on the spin axes of gyroscopes, the Lense - Thirring effect, which makes the spin axes of gyroscopes precess relative to quasars by 43 milli-arc-sec per year. It is hoped that one will be able to detect this effect by further analysis of the data which have been taken by Gravity Probe B. 1.2 The Question What physical cause explains the observational fact ’Mach zero’ ? Equivalently: What physical cause determines the time-evolution of gyroscope axes ? In the words of John A. -

Massachusetts Institute of Technology Midterm
Massachusetts Institute of Technology Physics Department Physics 8.20 IAP 2005 Special Relativity January 18, 2005 7:30–9:30 pm Midterm Instructions • This exam contains SIX problems – pace yourself accordingly! • You have two hours for this test. Papers will be picked up at 9:30 pm sharp. • The exam is scored on a basis of 100 points. • Please do ALL your work in the white booklets that have been passed out. There are extra booklets available if you need a second. • Please remember to put your name on the front of your exam booklet. • If you have any questions please feel free to ask the proctor(s). 1 2 Information Lorentz transformation (along the xaxis) and its inverse x� = γ(x − βct) x = γ(x� + βct�) y� = y y = y� z� = z z = z� ct� = γ(ct − βx) ct = γ(ct� + βx�) � where β = v/c, and γ = 1/ 1 − β2. Velocity addition (relative motion along the xaxis): � ux − v ux = 2 1 − uxv/c � uy uy = 2 γ(1 − uxv/c ) � uz uz = 2 γ(1 − uxv/c ) Doppler shift Longitudinal � 1 + β ν = ν 1 − β 0 Quadratic equation: ax2 + bx + c = 0 1 � � � x = −b ± b2 − 4ac 2a Binomial expansion: b(b − 1) (1 + a)b = 1 + ba + a 2 + . 2 3 Problem 1 [30 points] Short Answer (a) [4 points] State the postulates upon which Einstein based Special Relativity. (b) [5 points] Outline a derviation of the Lorentz transformation, describing each step in no more than one sentence and omitting all algebra. (c) [2 points] Define proper length and proper time. -

Minkowski's Proper Time and the Status of the Clock Hypothesis
Minkowski’s Proper Time and the Status of the Clock Hypothesis1 1 I am grateful to Stephen Lyle, Vesselin Petkov, and Graham Nerlich for their comments on the penultimate draft; any remaining infelicities or confusions are mine alone. Minkowski’s Proper Time and the Clock Hypothesis Discussion of Hermann Minkowski’s mathematical reformulation of Einstein’s Special Theory of Relativity as a four-dimensional theory usually centres on the ontology of spacetime as a whole, on whether his hypothesis of the absolute world is an original contribution showing that spacetime is the fundamental entity, or whether his whole reformulation is a mere mathematical compendium loquendi. I shall not be adding to that debate here. Instead what I wish to contend is that Minkowski’s most profound and original contribution in his classic paper of 100 years ago lies in his introduction or discovery of the notion of proper time.2 This, I argue, is a physical quantity that neither Einstein nor anyone else before him had anticipated, and whose significance and novelty, extending beyond the confines of the special theory, has become appreciated only gradually and incompletely. A sign of this is the persistence of several confusions surrounding the concept, especially in matters relating to acceleration. In this paper I attempt to untangle these confusions and clarify the importance of Minkowski’s profound contribution to the ontology of modern physics. I shall be looking at three such matters in this paper: 1. The conflation of proper time with the time co-ordinate as measured in a system’s own rest frame (proper frame), and the analogy with proper length. -

Space, Time, and Spacetime
Fundamental Theories of Physics 167 Space, Time, and Spacetime Physical and Philosophical Implications of Minkowski's Unification of Space and Time Bearbeitet von Vesselin Petkov 1. Auflage 2010. Buch. xii, 314 S. Hardcover ISBN 978 3 642 13537 8 Format (B x L): 15,5 x 23,5 cm Gewicht: 714 g Weitere Fachgebiete > Physik, Astronomie > Quantenphysik > Relativität, Gravitation Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. The Experimental Verdict on Spacetime from Gravity Probe B James Overduin Abstract Concepts of space and time have been closely connected with matter since the time of the ancient Greeks. The history of these ideas is briefly reviewed, focusing on the debate between “absolute” and “relational” views of space and time and their influence on Einstein’s theory of general relativity, as formulated in the language of four-dimensional spacetime by Minkowski in 1908. After a brief detour through Minkowski’s modern-day legacy in higher dimensions, an overview is given of the current experimental status of general relativity. Gravity Probe B is the first test of this theory to focus on spin, and the first to produce direct and unambiguous detections of the geodetic effect (warped spacetime tugs on a spin- ning gyroscope) and the frame-dragging effect (the spinning earth pulls spacetime around with it). -

Physical Holonomy, Thomas Precession, and Clifford Algebra
hXWWM UWThPh 1988-39 Physical Holonomy, Thomas Precession, and Clifford Algebra H. Urbantke Institut für Theoretische Physik Universität Wien Abstract After a general discussion of the physical significance of holonomy group transfor mations, a relation between the transports of Fermi-Walker and Levi-Civitä in Special Relativity is pointed out. A well-known example - the Thomas-Wigner angle - is red- erived in a completely frame-independent manner using Clifford algebra. 1 Introduction — Holonomy Groups in Physics Quantum Holonomy has become a rather popular concept in recent /ears, in particular through the work [1] of Berry and Simon; but it is clear that the Aharanov-Bohm effect [2] is a much earlier instance of it. The point is that here the differential geometric idea of parallel transport defined by connections in fibre bundles [3] attains rather direct physical meaning susceptible to experimentation. This is remarkable because parallel transport has been around in differential geometry since 1917, and differential geometry has invaded theoretical physics since the early days of General Relativity, with new impulses coming from Hamiltonian dynamics and gauge theory: yet the significance of connections used to be formal, the 'transformation properties' standing in the forefront, as one can see from the old 'Ricci-Calculus' as used by Einstein and Grossmann [4] or from the way non- abelian gauge fields were introduced by Yang and Mills [5]. The rather indirect 'physical' realization of parallel transport in General Relativity by Schild's 'ladder construction' [6] also stresses this fact; in non-abelian gauge theory I am aware of no physical realization at all. -
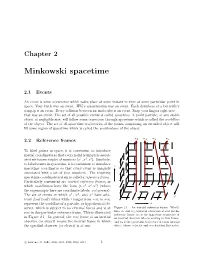
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
Length Contraction the Proper Length of an Object Is Longest in the Reference Frame in Which It Is at Rest
Newton’s Principia in 1687. Galilean Relativity Velocities add: V= U +V' V’= 25m/s V = 45m/s U = 20 m/s What if instead of a ball, it is a light wave? Do velocities add according to Galilean Relativity? Clocks slow down and rulers shrink in order to keep the speed of light the same for all observers! Time is Relative! Space is Relative! Only the SPEED OF LIGHT is Absolute! A Problem with Electrodynamics The force on a moving charge depends on the Frame. Charge Rest Frame Wire Rest Frame (moving with charge) (moving with wire) F = 0 FqvB= sinθ Einstein realized this inconsistency and could have chosen either: •Keep Maxwell's Laws of Electromagnetism, and abandon Galileo's Spacetime •or, keep Galileo's Space-time, and abandon the Maxwell Laws. On the Electrodynamics of Moving Bodies 1905 EinsteinEinstein’’ss PrinciplePrinciple ofof RelativityRelativity • Maxwell’s equations are true in all inertial reference frames. • Maxwell’s equations predict that electromagnetic waves, including light, travel at speed c = 3.00 × 108 m/s =300,000km/s = 300m/µs . • Therefore, light travels at speed c in all inertial reference frames. Every experiment has found that light travels at 3.00 × 108 m/s in every inertial reference frame, regardless of how the reference frames are moving with respect to each other. Special Theory: Inertial Frames: Frames do not accelerate relative to eachother; Flat Spacetime – No Gravity They are moving on inertia alone. General Theory: Noninertial Frames: Frames accelerate: Curved Spacetime, Gravity & acceleration. Albert Einstein 1916 The General Theory of Relativity Postulates of Special Relativity 1905 cxmsms==3.0 108 / 300 / μ 1. -

Effective Field Theory for Spacetime Symmetry Breaking
RIKEN-MP-96, RIKEN-QHP-171, MAD-TH-14-10 Effective field theory for spacetime symmetry breaking Yoshimasa Hidaka1, Toshifumi Noumi1 and Gary Shiu2;3 1Theoretical Research Devision, RIKEN Nishina Center, Japan 2Department of Physics, University of Wisconsin, Madison, WI 53706, USA 3Center for Fundamental Physics and Institute for Advanced Study, Hong Kong University of Science and Technology, Hong Kong [email protected], [email protected], [email protected] Abstract We discuss the effective field theory for spacetime symmetry breaking from the local symmetry point of view. By gauging spacetime symmetries, the identification of Nambu-Goldstone (NG) fields and the construction of the effective action are performed based on the breaking pattern of diffeomor- phism, local Lorentz, and (an)isotropic Weyl symmetries as well as the internal symmetries including possible central extensions in nonrelativistic systems. Such a local picture distinguishes, e.g., whether the symmetry breaking condensations have spins and provides a correct identification of the physical NG fields, while the standard coset construction based on global symmetry breaking does not. We illustrate that the local picture becomes important in particular when we take into account massive modes associated with symmetry breaking, whose masses are not necessarily high. We also revisit the coset construction for spacetime symmetry breaking. Based on the relation between the Maurer- arXiv:1412.5601v2 [hep-th] 7 Nov 2015 Cartan one form and connections for spacetime symmetries, we classify the physical meanings of the inverse Higgs constraints by the coordinate dimension of broken symmetries. Inverse Higgs constraints for spacetime symmetries with a higher dimension remove the redundant NG fields, whereas those for dimensionless symmetries can be further classified by the local symmetry breaking pattern.