Advanced Remote with HAPTIC
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Remote Control (RC) Monitor Electrical Controls Supplemental Instructions for Use with RC Monitor Manual
MANUAL: Remote Control (RC) Monitor Electrical Controls Supplemental Instructions for use with RC Monitor Manual INSTRUCTIONS FOR INSTALLATION, SAFE OPERATION AND MAINTENANCE Understand manual before use. Operation of this device without understanding the manual and DANGER receiving proper training is a misuse of this equipment. Obtain safety information at www.tft. com/serial-number SECTION 3.0 SECTION 4.9 General Information and Specifications Toggle Switch Monitor Operator Station SECTION 4.0 (Y4E-TS) Electrical Controls Installation and Operation SECTION 4.10 SECTION 4.1 Monitor Communication Monitor Mounted Interface Control Operator Station (Y4E-COMM) SECTION 4.2 SECTION 4.11 Panel Mount Monitor Position Display Operator Station (Y4E-DISP) (Y4E-RP) SECTION 4.12 SECTION 4.3 Remote Auxiliary Function Panel Mount With Display Interface Control Operator Station (YE-REMAUX) (Y4E-RP-D) SECTION 4.4 SECTION 4.13 Tethered Electric RC Monitor Aerial Operator Station Truck Installation (Y4E-CT-##) SECTION 4.14 SECTION 4.5 Multiplex Interface Control (YE-CAN#) Tethered Operator Station With Display (Y4E-CT-##-D) SECTION 4.15 Ethernet Interface Control SECTION 4.6 Wireless Operator Station (YE-RF-##) SECTION 4.16 Electric Nozzle Actuator SECTION 4.7 Wireless Operator Station With Display (YE-RF-##-D) SECTION 4.17 Valve Kits SECTION 4.8 (YE-VK-PH) Joystick Operator Station SECTION 5.0 (Y4E-JS) Troubleshooting TASK FORCE TIPS LLC 3701 Innovation Way, IN 46383-9327 USA MADE IN USA • tft.com 800-348-2686 • 219-462-6161 • Fax 219-464-7155 ©Copyright Task Force Tips LLC 2008-2018 LIY-500 November 21, 2018 Rev13 DANGER PERSONAL RESPONSIBILITY CODE The member companies of FEMSA that provide emergency response equipment and services want responders to know and understand the following: 1. -

Feeling Is Believing: Using a Force Feedback Joystick to Teach
Session 3668 Feeling is Believing: Using a Force-Feedback Joystick to Teach Dynamic Systems Christopher Richard, Allison M. Okamura, Mark. R. Cutkosky Center for Design Research, Stanford University Abstract As an innovative approach to teaching the laboratory component of an undergraduate course on dynamic systems, we present the haptic paddle: a low-cost, single-axis, force-feedback joystick. Using the paddle, students not only learned to model and analyze dynamic systems, but by using their sense of touch, they were able to feel the effects of phenomena such as viscous damping, stiffness, and inertia. Feeling the dynamics, in addition to learning the underlying physics, improved students’ understanding and added an element of fun to the course. In this paper, we describe the purpose and design of the haptic paddle, present examples of how the paddle was integrated into laboratory exercises, and show the results of student evaluations. 1. Introduction Engineering educators are continually challenged to provide physical examples in order to make course material more interesting and accessible to students. Laboratory exercises, software simulations, and in-class demonstrations are all helpful in developing students’ ability to connect theoretical principles with physical reality. The literature contains several examples of computer- based dynamic simulations being used for pedagogical purposed 1,4,9. But even with these aids, concepts such as eigenvalues, instability, and time constants can seem mysterious to students encountering them for the first time. Haptic interfaces, which allow a user to feel a virtual environment, are promising tools for helping students obtain an understanding of these physical phenomena. 1.1 The Field of Haptics The word haptic means relating to or based on the sense of touch. -
Novint Falcon and Novint/Sandia 3D-Touch Software
2007 R&D 100 Award Entry Form NOVINT 2007 R&D 100 Award Entry Form NOVINT Submitting Organization Tom Anderson Novint Technologies 4109 Bryan Avenue NW Albuquerque, NM 87114, USA 505-463-1469 (phone) 866-298-4420 (fax) [email protected] AFFIRMATION: I affirm that all information submitted as a part of, or supplemental to, this entry is a fair and accurate represen- tation of this product. (Signature)______________________________________ Joint Submitters Nathan L. Golden Sandia National Laboratories P.O. Box 1500 Albuquerque, NM 87185-0114, USA 505-845-9737 (phone) 505-844-8011 (fax) [email protected] Jeff Smith Lunar Design 541 Eighth Street San Francisco, CA 94103, USA 415-252-4388 (phone) 415-252-4389 (fax) [email protected] 2007 R&D 100 Award Entry Form NOVINT Joint Submitters Francois Conti Force Dimension PSE-C, CH-1015 Lausanne, Switzerland 41 21 693-1911 (phone) 41 21 693-1910 (fax) [email protected] Product Name Novint Falcon and Novint/Sandia 3D-Touch Software Brief Product Description The Novint Falcon and its 3D-Touch Software lets consumers, for the first time, use an accurate sense of touch in computing. Product First Marketed or Available for Order The technology was first available for licensing in March 2006. It was first demonstrated at the 2006 Game Developers Conference. Inventor or Principal Developers Tom Anderson, CEO, Novint Technologies Walt Aviles, CTO, Novint Technologies Bill Anderson, Director of Game Development, Novint Technologies Jack Harrod, Hardware Consultant, Novint Technologies Arthurine Breckenridge, Consultant, Novint Technologies Richard Aviles, Programmer, Novint Technologies Jake Jones, Programmer, Novint Technologies Nick Brown, Programmer, Novint Technologies Marc Midura, Programmer, Novint Technologies Daryl Lee, Programmer, Novint Technologies 4109 Bryan Avenue NW Albuquerque, NM 87114, USA 866-298-4420 (phone) 866-298-4420 (fax) [email protected] 2007 R&D 100 Award Entry Form NOVINT Inventor or Principal Developers George Davidson Member of the Technical Staff Sandia National Laboratories P.O. -

Robot Explorer Program Manual
25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 i90 Robot Explorer Program Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 1 - Copyright Statement This manual or any portion of it may not be copied or duplicated without the expressed written consent of Dr Robot. All the software, firmware, hardware and product design accompanying with Dr Robot’s product are solely owned and copyrighted by Dr Robot. End users are authorized to use for personal research and educational use only. Duplication, distribution, reverse-engineering, or commercial application of the Dr Robot or licensed software and hardware without the expressed written consent of Dr Robot is explicitly forbidden. Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 2 - Table of Contents I. Introduction 4 II. System Requirements 4 III. Software Installation 5 Installing the i90 Robot Explorer Programs 5 Install the Joystick Controller 5 IV. Robot Operations 6 Using the Joystick Controls 6 Controlling Camera 7 Driving the Robot 7 Using i90 Robot Explorer Program Control 8 Video display 8 Operation Option 9 Utility Panel 17 Robot & Map Display 18 Robot Status 19 Using i90 Robot Explorer Client Program Control 20 Video 21 Robot & Map Display 21 Camera Operation 21 Robot Operation 21 Robot Data Display 21 Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 3 - I. Introduction This manual will provide you information on using the i90 Robot Explorer program to operate the robot. Please refer to the i90 Quick Guide regarding other documents related to i90. -

ACCESSORIES for PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control
ACCESSORIES FOR PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control Tokyo, October 3, 2006 – Sony Computer Entertainment Inc. (SCEI) today announced that Wireless Controller (SIXAXIS™) and Memory Card Adaptor would become available simultaneously with the launch of PLAYSTATION®3 (PS3) computer entertainment system on November 11th, 2006, in Japan, at a recommended retail price of 5,000 yen (tax included) and 1,500 yen (tax included) respectively. BD Remote Control will also become available on December 7th 2006, at a recommended retail price of 3,600 yen (tax included). Wireless Controller (SIXAXIS) for PS3 employs a high-precision, highly sensitive six-axis sensing system, which detects natural and intuitive movements of hands for real-time interactive play. With the adoption of Bluetooth® wireless technology, it allows up to 7 players to play at the same time, without having to attach any other external device such as a multitap. In addition, by simply plugging a USB cable to the controller, users can seamlessly switch from wireless to wired connection and automatically charge its battery while the controller is in use. Controller battery lasts up to 30 hours when fully charged *1). The new Memory Card Adaptor enables users to transfer data saved on Memory Cards for PlayStation® and PlayStation®2 onto the hard disk drive of PS3. To transfer data, users need to simply insert their Memory Cards to the Memory Card Adaptor connected to PS3 via a USB port. In December, BD Remote Control will also become available, which enables users to easily operate movies and music content on BD (Blu-ray Disc) and DVD on PS3. -

I Love My Iphone... but There Are Certain Things That 'Niggle'me
“I Love My iPhone … But There Are Certain Things That ‘Niggle’ Me” Anna Haywood and Gemma Boguslawski Serco Usability Services, London, United Kingdom [email protected], [email protected] Abstract. Touchscreen technology is gaining sophistication, and the freedom offered by finger-based interaction has heralded a new phase in mobile phone evolution. The list of touchscreen mobiles is ever increasing as the appeal of ‘touch’ moves beyond the realms of the early adopter or fanboy, into the imagi- nation of the general consumer. However, despite this increasing popularity, touchscreen cannot be considered a panacea. It is important to look beyond the promise of a more direct and intuitive interface, towards the day-to-day reality. Based on our independent research, this paper explores aspects of the touch- screen user experience, offering iPhone insights as examples, before presenting key best practice guidelines to help design and evaluate finger-activated touch- screen solutions for small screen devices. 1 Introduction Although ‘touch’ is the latest buzzword, touchscreen technology and devices have been in use for over ten years, from public systems such as self-order and information kiosks, through to personal handheld devices such as PDAs or gaming devices. As the technology gains sophistication and teething problems are worked on, the list is ever increasing. However, it’s only since touchscreen heralded a new phase in mobile phone evolution with the freedom of finger-based interaction, that ‘touch’ has taken hold of the general consumers’ imagination. Mobile phones by their very nature are intended to support communication and, in- creasingly, access to information while on the move. -

Gesture Recognition & Haptic Feedback Technologies
Gesture Recognition & Haptic Feedback Technologies A whitepaper on touchless interfaces and tactile feedback Gesture Recognition & Haptic Feedback Technologies A whitepaper on touchless interfaces and tactile feedback by the huge demand to detect body movements at a Overview distance for the enormous global gaming market.5 But more generally touchless gesture recognition is This whitepaper explores the reasons for, and enabling acknowledged as the ‘next frontier’ in human machine technologies behind, gesture recognition and haptic interfaces for an enormous range of applications, which are feedback markets and highlights the advantages and now moving beyond computer and game interfaces to limitations of a variety of implementations. include consumer and domestic appliances, and automotive dashboards. Since the development of the trackball in 1941, which later led to the consumer release of the computer mouse in the Users of touchless controls often comment they lack 1980’s, engineers across the globe have sought to push the precision and the tactile feedback humans find so valuable in limitations of computer-human interaction in an attempt to confirming they are engaging with the electronics. Naturally achieve a more intuitive, natural user experience. The we prefer feeling a control, different textures and surfaces, expressive world of gestures, used in day-to-day, and often hearing an audible confirmation too. So effective face-to-face communications for millennia have been an simulation of tactile feedback, haptics, is seen as the key to obvious avenue to explore, pared with sophisticated audio unlocking the potential of touchless gesture recognition. and visual developments, the market has come a long way. The importance of the human sense of touch has also been A Feel for the Market championed, with ‘haptic feedback’ being added to many consumer devices. -

An Intuitive Tangible Game Controller
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by AUT Scholarly Commons Jacques Foottit, Dave Brown, Stefan Marks, and Andy M. Connor. 2014. An Intuitive Tangible Game Controller. In Proceedings of the 2014 Conference on Interactive Entertainment (IE2014), Karen Blackmore, Keith Nesbitt, and Shamus P. Smith (Eds.). ACM, New York, NY, USA, , Article 4 , 7 pages. DOI=10.1145/2677758.2677774 http://doi.acm.org/10.1145/2677758.2677774 An Intuitive Tangible Game Controller Jacques Foottit, Dave Brown, Stefan Marks & Andy M. Connor Auckland University of Technology Colab (D-60), Private Bag 92006 Wellesley Street, Auckland 1142, NZ +64 9 921 9999 [wgk9328; wpv9142; smarks; aconnor]@aut.ac.nz ABSTRACT draw the attention of a user to a particular output. A wide variety This paper outlines the development of a sensory feedback device of implementations exist and the focus of this paper is the use of a providing a tangible interface for controlling digital environments, vibrotactile feedback mechanism. in this example a flight simulator, where the intention for the This paper outlines the development of a tangible interface for device is that it is relatively low cost, versatile and intuitive. controlling digital environments such as games that has the Gesture based input allows for a more immersive experience, so potential for being versatile and intuitive. The interface is based rather than making the user feel like they are controlling an around a particular design of a haptic glove used in conjunction aircraft the intuitive interface allows the user to become the with a Kinect controller. -

Immersive Robotic Telepresence for Remote Educational Scenarios
sustainability Article Immersive Robotic Telepresence for Remote Educational Scenarios Jean Botev 1,* and Francisco J. Rodríguez Lera 2 1 Department of Computer Science, University of Luxembourg, L-4364 Esch-sur-Alzette, Luxembourg 2 Department of Mechanical, Informatics and Aerospace Engineering, University of León, 24071 León, Spain; [email protected] * Correspondence: [email protected] Abstract: Social robots have an enormous potential for educational applications and allow for cognitive outcomes that are similar to those with human involvement. Remotely controlling a social robot to interact with students and peers in an immersive fashion opens up new possibilities for instructors and learners alike. Using immersive approaches can promote engagement and have beneficial effects on remote lesson delivery and participation. However, the performance and power consumption associated with the involved devices are often not sufficiently contemplated, despite being particularly important in light of sustainability considerations. The contributions of this research are thus twofold. On the one hand, we present telepresence solutions for a social robot’s location-independent operation using (a) a virtual reality headset with controllers and (b) a mobile augmented reality application. On the other hand, we perform a thorough analysis of their power consumption and system performance, discussing the impact of employing the various technologies. Using the QTrobot as a platform, direct and immersive control via different interaction modes, including motion, emotion, and voice output, is possible. By not focusing on individual subsystems or motor chains, but the cumulative Citation: Botev, J.; Rodríguez Lera, energy consumption of an unaltered robot performing remote tasks, this research provides orientation F.J. Immersive Robotic Telepresence regarding the actual cost of deploying immersive robotic telepresence solutions. -
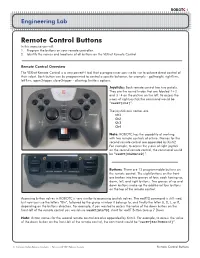
Remote Control Buttons in This Exercise You Will: 1
ROBOTC 1 Engineering Lab Remote Control Buttons In this exercise you will: 1. Program the buttons on your remote controller. 2. Identify the names and locations of all buttons on the VEXnet Remote Control. Remote Control Overview The VEXnet Remote Control is a very powerful tool that a programmer can use to use to achieve direct control of their robot. Each button can be programmed to control a specific behavior, for example - goStraight, rightTurn, leftTurn, openGripper, closeGripper - allowing limitless options. Joysticks: Each remote control has two josticks. They are the round knobs that are labeled 1+2 and 3+4 on the picture on the left. To access the y-axis of right joystick the command would be “vexRT[Ch2]”. The joystick axis names are: Ch1 Ch2 Ch3 Ch4 Note: ROBOTC has the capability of working with two remote controls at a time. Names for the second remote control are appended by Xmtr2. For example, to access the y-axis of right joystick on the second remote control, the command would be “vexRT[Ch2Xmtr2]”. Buttons: There are 12 programmable buttons on the remote control. The eight buttons on the front are broken into two groups of four, each having up, down, left, and right buttons. Two groups of up and down buttons make up the additional four buttons on the top of the remote control. Accessing button values in ROBOTC is very similar to accessing joystick values. The vexRT[] command is still used, but now you use the letters “Btn”, followed by the group number it belongs to, and finally the letter U, D, L, or R, depending on the buttons direction. -

CHI'94 Format Description
1 New Interaction Techniques 2003 Grigori Evreinov University of Tampere Department of Computer and Information Sciences TAUCHI Unit for Computer-Human Interaction Pinninkatu 53B FIN-33014 TAMPERE, FINLAND http://www.cs.uta.fi/~grse/NIT_2003/NIT2003.htm PREFACE virtual reality and natural activity The course “New Interaction Techniques” [1] was Temporal dimension organized by Prof. Roope Raisamo in the spring of 2000 Audio-haptic manipulations at the Department of Computer and Information Sciences Engineering basics for computer interaction in the University of Tampere. The course is one of the Device capabilities and their future evolution advanced courses on human-computer interaction Trends in component technology supported by TAUCHI Unit for Computer-Human Display technology Interaction. Input devices Communication with PC The main goal of the course is deep analysis of novel Joystick port technological achievements for augmented Parallel port communication as well as user behavior in different Serial port situations, including extreme ones. Based on advanced USB engineering, software design and presentation of Text entry as the model for pointing & selection strategically-important scientific directions, the topics of Introduction to the problem and samples lectures should stimulate creative capabilities of the Text input: Techniques and research tools students for development of new approaches to the Visiting lecturer: Poika Isokoski solution of current and future tasks in computer science. Interactive Surfaces and Perceived Textures Human tactile sense Obviously, the most of students have different Tactile matrixes, displays and actuators background. Some of students have own experience in Textures and tactile symbols their use of novel devices; some students, probably, could Sound Pen propose own ideas to improve existing interaction Data Sonification techniques. -
Virtual Haptic System for Intuitive Planning of Bone Fixation Plate Placement
Accepted Manuscript Virtual haptic system for intuitive planning of bone fixation plate placement Kup-Sze Choi, Beat Schmutz, Xue-Jian He, Wing-Leung Chan, Michael Schuetz PII: S2352-9148(17)30118-1 DOI: 10.1016/j.imu.2017.07.005 Reference: IMU 54 To appear in: Informatics in Medicine Unlocked Received Date: 11 July 2017 Revised Date: 2352-9148 2352-9148 Accepted Date: 19 July 2017 Please cite this article as: Choi K-S, Schmutz B, He X-J, Chan W-L, Schuetz M, Virtual haptic system for intuitive planning of bone fixation plate placement, Informatics in Medicine Unlocked (2017), doi: 10.1016/j.imu.2017.07.005. This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain. 1 ACCEPTED MANUSCRIPT Virtual Haptic System for Intuitive Planning of Bone Fixation Plate Placement Kup-Sze Choi 1, Beat Schmutz 2, Xue-Jian He 1, Wing-Leung Chan 3, Michael Schuetz 4 1Centre for Smart Health, School of Nursing, the Hong Kong Polytechnic University, Hong Kong 2Institute of Health and Biomedical Innovation, Queensland University of Technology, Australia 3Department of Orthopaedics and Traumatology, Hong Kong Baptist Hospital, Hong Kong 4Centre for Musculoskeletal Surgery, University Clinic Charité, Germany Abstract Placement of pre-contoured fixation plate is a common treatment for bone fracture.