Lecture XVI: Symmetrical Spacetimes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Supplemental Lecture 5 Precession in Special and General Relativity
Supplemental Lecture 5 Thomas Precession and Fermi-Walker Transport in Special Relativity and Geodesic Precession in General Relativity Abstract This lecture considers two topics in the motion of tops, spins and gyroscopes: 1. Thomas Precession and Fermi-Walker Transport in Special Relativity, and 2. Geodesic Precession in General Relativity. A gyroscope (“spin”) attached to an accelerating particle traveling in Minkowski space-time is seen to precess even in a torque-free environment. The angular rate of the precession is given by the famous Thomas precession frequency. We introduce the notion of Fermi-Walker transport to discuss this phenomenon in a systematic fashion and apply it to a particle propagating on a circular orbit. In a separate discussion we consider the geodesic motion of a particle with spin in a curved space-time. The spin necessarily precesses as a consequence of the space-time curvature. We illustrate the phenomenon for a circular orbit in a Schwarzschild metric. Accurate experimental measurements of this effect have been accomplished using earth satellites carrying gyroscopes. This lecture supplements material in the textbook: Special Relativity, Electrodynamics and General Relativity: From Newton to Einstein (ISBN: 978-0-12-813720-8). The term “textbook” in these Supplemental Lectures will refer to that work. Keywords: Fermi-Walker transport, Thomas precession, Geodesic precession, Schwarzschild metric, Gravity Probe B (GP-B). Introduction In this supplementary lecture we discuss two instances of precession: 1. Thomas precession in special relativity and 2. Geodesic precession in general relativity. To set the stage, let’s recall a few things about precession in classical mechanics, Newton’s world, as we say in the textbook. -

Mach's Principle: Exact Frame
MACH’S PRINCIPLE: EXACT FRAME-DRAGGING BY ENERGY CURRENTS IN THE UNIVERSE CHRISTOPH SCHMID Institute of Theoretical Physics, ETH Zurich CH-8093 Zurich, Switzerland We show that the dragging of axis directions of local inertial frames by a weighted average of the energy currents in the universe (Mach’s postulate) is exact for all linear perturbations of all Friedmann-Robertson-Walker universes. 1 Mach’s Principle 1.1 The Observational Fact: ’Mach zero’ The time-evolution of local inertial axes, i.e. the local non-rotating frame is experimentally determined by the spin axes of gyroscopes, as in inertial guidance systems in airplanes and satellites. This is true both in Newtonian physics (Foucault 1852) and in General Relativity. It is an observational fact within present-day accuracy that the spin axes of gyroscopes do not precess relative to quasars. This observational fact has been named ’Mach zero’, where ’zero’ designates that this fact is not yet Mach’s principle, it is just the observational starting point. — There is an extremely small dragging effect by the rotating Earth on the spin axes of gyroscopes, the Lense - Thirring effect, which makes the spin axes of gyroscopes precess relative to quasars by 43 milli-arc-sec per year. It is hoped that one will be able to detect this effect by further analysis of the data which have been taken by Gravity Probe B. 1.2 The Question What physical cause explains the observational fact ’Mach zero’ ? Equivalently: What physical cause determines the time-evolution of gyroscope axes ? In the words of John A. -

Space, Time, and Spacetime
Fundamental Theories of Physics 167 Space, Time, and Spacetime Physical and Philosophical Implications of Minkowski's Unification of Space and Time Bearbeitet von Vesselin Petkov 1. Auflage 2010. Buch. xii, 314 S. Hardcover ISBN 978 3 642 13537 8 Format (B x L): 15,5 x 23,5 cm Gewicht: 714 g Weitere Fachgebiete > Physik, Astronomie > Quantenphysik > Relativität, Gravitation Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. The Experimental Verdict on Spacetime from Gravity Probe B James Overduin Abstract Concepts of space and time have been closely connected with matter since the time of the ancient Greeks. The history of these ideas is briefly reviewed, focusing on the debate between “absolute” and “relational” views of space and time and their influence on Einstein’s theory of general relativity, as formulated in the language of four-dimensional spacetime by Minkowski in 1908. After a brief detour through Minkowski’s modern-day legacy in higher dimensions, an overview is given of the current experimental status of general relativity. Gravity Probe B is the first test of this theory to focus on spin, and the first to produce direct and unambiguous detections of the geodetic effect (warped spacetime tugs on a spin- ning gyroscope) and the frame-dragging effect (the spinning earth pulls spacetime around with it). -

Physical Holonomy, Thomas Precession, and Clifford Algebra
hXWWM UWThPh 1988-39 Physical Holonomy, Thomas Precession, and Clifford Algebra H. Urbantke Institut für Theoretische Physik Universität Wien Abstract After a general discussion of the physical significance of holonomy group transfor mations, a relation between the transports of Fermi-Walker and Levi-Civitä in Special Relativity is pointed out. A well-known example - the Thomas-Wigner angle - is red- erived in a completely frame-independent manner using Clifford algebra. 1 Introduction — Holonomy Groups in Physics Quantum Holonomy has become a rather popular concept in recent /ears, in particular through the work [1] of Berry and Simon; but it is clear that the Aharanov-Bohm effect [2] is a much earlier instance of it. The point is that here the differential geometric idea of parallel transport defined by connections in fibre bundles [3] attains rather direct physical meaning susceptible to experimentation. This is remarkable because parallel transport has been around in differential geometry since 1917, and differential geometry has invaded theoretical physics since the early days of General Relativity, with new impulses coming from Hamiltonian dynamics and gauge theory: yet the significance of connections used to be formal, the 'transformation properties' standing in the forefront, as one can see from the old 'Ricci-Calculus' as used by Einstein and Grossmann [4] or from the way non- abelian gauge fields were introduced by Yang and Mills [5]. The rather indirect 'physical' realization of parallel transport in General Relativity by Schild's 'ladder construction' [6] also stresses this fact; in non-abelian gauge theory I am aware of no physical realization at all. -
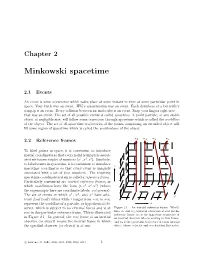
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Effective Field Theory for Spacetime Symmetry Breaking
RIKEN-MP-96, RIKEN-QHP-171, MAD-TH-14-10 Effective field theory for spacetime symmetry breaking Yoshimasa Hidaka1, Toshifumi Noumi1 and Gary Shiu2;3 1Theoretical Research Devision, RIKEN Nishina Center, Japan 2Department of Physics, University of Wisconsin, Madison, WI 53706, USA 3Center for Fundamental Physics and Institute for Advanced Study, Hong Kong University of Science and Technology, Hong Kong [email protected], [email protected], [email protected] Abstract We discuss the effective field theory for spacetime symmetry breaking from the local symmetry point of view. By gauging spacetime symmetries, the identification of Nambu-Goldstone (NG) fields and the construction of the effective action are performed based on the breaking pattern of diffeomor- phism, local Lorentz, and (an)isotropic Weyl symmetries as well as the internal symmetries including possible central extensions in nonrelativistic systems. Such a local picture distinguishes, e.g., whether the symmetry breaking condensations have spins and provides a correct identification of the physical NG fields, while the standard coset construction based on global symmetry breaking does not. We illustrate that the local picture becomes important in particular when we take into account massive modes associated with symmetry breaking, whose masses are not necessarily high. We also revisit the coset construction for spacetime symmetry breaking. Based on the relation between the Maurer- arXiv:1412.5601v2 [hep-th] 7 Nov 2015 Cartan one form and connections for spacetime symmetries, we classify the physical meanings of the inverse Higgs constraints by the coordinate dimension of broken symmetries. Inverse Higgs constraints for spacetime symmetries with a higher dimension remove the redundant NG fields, whereas those for dimensionless symmetries can be further classified by the local symmetry breaking pattern. -

A Geometric Introduction to Spacetime and Special Relativity
A GEOMETRIC INTRODUCTION TO SPACETIME AND SPECIAL RELATIVITY. WILLIAM K. ZIEMER Abstract. A narrative of special relativity meant for graduate students in mathematics or physics. The presentation builds upon the geometry of space- time; not the explicit axioms of Einstein, which are consequences of the geom- etry. 1. Introduction Einstein was deeply intuitive, and used many thought experiments to derive the behavior of relativity. Most introductions to special relativity follow this path; taking the reader down the same road Einstein travelled, using his axioms and modifying Newtonian physics. The problem with this approach is that the reader falls into the same pits that Einstein fell into. There is a large difference in the way Einstein approached relativity in 1905 versus 1912. I will use the 1912 version, a geometric spacetime approach, where the differences between Newtonian physics and relativity are encoded into the geometry of how space and time are modeled. I believe that understanding the differences in the underlying geometries gives a more direct path to understanding relativity. Comparing Newtonian physics with relativity (the physics of Einstein), there is essentially one difference in their basic axioms, but they have far-reaching im- plications in how the theories describe the rules by which the world works. The difference is the treatment of time. The question, \Which is farther away from you: a ball 1 foot away from your hand right now, or a ball that is in your hand 1 minute from now?" has no answer in Newtonian physics, since there is no mechanism for contrasting spatial distance with temporal distance. -
![Arxiv:2105.04329V2 [Gr-Qc] 12 Jul 2021](https://docslib.b-cdn.net/cover/6738/arxiv-2105-04329v2-gr-qc-12-jul-2021-2196738.webp)
Arxiv:2105.04329V2 [Gr-Qc] 12 Jul 2021
Inductive rectilinear frame dragging and local coupling to the gravitational field of the universe L.L. Williams∗ Konfluence Research Institute, Manitou Springs, Colorado N. Inany School of Natural Sciences University of California, Merced Merced, California (Dated: 11 July 2021) There is a drag force on objects moving in the background cosmological metric, known from galaxy cluster dynamics. The force is quite small over laboratory timescales, yet it applies in principle to all moving bodies in the universe. It means it is possible for matter to exchange momentum and energy with the gravitational field of the universe, and that the cosmological metric can be determined in principle from local measurements on moving bodies. The drag force can be understood as inductive rectilinear frame dragging. This dragging force exists in the rest frame of a moving object, and arises from the off-diagonal components induced in the boosted-frame metric. Unlike the Kerr metric or other typical frame-dragging geometries, cosmological inductive dragging occurs at uniform velocity, along the direction of motion, and dissipates energy. Proposed gravito-magnetic invariants formed from contractions of the Riemann tensor do not appear to capture inductive dragging effects, and this might be the first identification of inductive rectilinear dragging. 1. INTRODUCTION The freedom of a general coordinate transformation allows a local Lorentz frame to be defined sufficiently locally around a point in curved spacetime. In this frame, also called an inertial frame, first derivatives of the metric vanish, and therefore the connections vanish, and gravitational forces on moving bodies vanish. Yet the coordinate freedom cannot remove all second derivatives of the metric, and so components of the Riemann tensor can be non-zero locally where the connections are zero. -

Minkowski's Space-Time: from Visual Thinking to the Absolute World*
Minkowski’s Space-Time: From Visual Thinking to the Absolute World* Peter Galison Galison traces Minkowski‘s progression from his visual-geometric thinking to his physics of space-time and finally to his view of the nature of physical reality. Minkowski always held that a sort of ―pre-established harmony‖ existed between mathematics and nature, but then a different sort of ―pre-established harmony‖ than that of Leibniz. Geometry was not merely an abstraction from natural phenomena or a mere description of physical laws through a mathematical construct; rather, the world was indeed a ―four-dimensional, non-Euclidean manifold‖, a true geometrical structure. As a contemporary of Einstein, Minkowski proposed a reconciliation of gravitation and electro-magnetism that he called, ―the Theory of the Absolute World‖. Despite his untimely death, Minkowski holds a prominent place in twentieth century theoretical physics, not the least for his conception of ―space-time‖, emphatically stating that we can no longer speak of ―space‖ and ―time‖, rather ―spaces‖ and ―times‖. Hermann Minkowski is best known for his invention of the concept of space- time. For the last seventy years, this idea has found application in physics from electromagnetism to black holes. But for Minkowski space-time came to signify much more than a useful tool of physics. It was, he thought, the core of a new view of nature which he dubbed the ―Theory of the Absolute World.‖ This essay will focus on two related questions: how did Minkowski arrive at his idea of space-time, and how did he progress from space-time to his new concept of physical reality.1 * This essay is reprinted with permissions from the author and publisher from Historical Studies in the Physical Sciences, Vol.10, (1979):85-119. -

3 Classical Symmetries and Conservation Laws
3 Classical Symmetries and Conservation Laws We have used the existence of symmetries in a physical system as a guiding principle for the construction of their Lagrangians and energy functionals. We will show now that these symmetries imply the existence of conservation laws. There are different types of symmetries which, roughly, can be classi- fied into two classes: (a) spacetime symmetries and (b) internal symmetries. Some symmetries involve discrete operations, hence called discrete symme- tries, while others are continuous symmetries. Furthermore, in some theories these are global symmetries,whileinotherstheyarelocal symmetries.The latter class of symmetries go under the name of gauge symmetries.Wewill see that, in the fully quantized theory, global and local symmetries play different roles. Spacetime symmetries are the most common examples of symmetries that are encountered in Physics. They include translation invariance and rotation invariance. If the system is isolated, then time-translation is also a symme- try. A non-relativistic system is in general invariant under Galilean trans- formations, while relativistic systems, are instead Lorentz invariant. Other spacetime symmetries include time-reversal (T ), parity (P )andcharge con- jugation (C). These symmetries are discrete. In classical mechanics, the existence of symmetries has important conse- quences. Thus, translation invariance,whichisaconsequenceofuniformity of space, implies the conservation of the total momentum P of the system. Similarly, isotropy implies the conservation of the total angular momentum L and time translation invariance implies the conservation of the total energy E. All of these concepts have analogs in field theory. However, infieldtheory new symmetries will also appear which do not have an analog in the classi- 52 Classical Symmetries and Conservation Laws cal mechanics of particles.