Passive Lorentz Transformations with Spacetime Algebra
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Newtonian Gravity and Special Relativity 12.1 Newtonian Gravity
Physics 411 Lecture 12 Newtonian Gravity and Special Relativity Lecture 12 Physics 411 Classical Mechanics II Monday, September 24th, 2007 It is interesting to note that under Lorentz transformation, while electric and magnetic fields get mixed together, the force on a particle is identical in magnitude and direction in the two frames related by the transformation. Indeed, that was the motivation for looking at the manifestly relativistic structure of Maxwell's equations. The idea was that Maxwell's equations and the Lorentz force law are automatically in accord with the notion that observations made in inertial frames are physically equivalent, even though observers may disagree on the names of these forces (electric or magnetic). Today, we will look at a force (Newtonian gravity) that does not have the property that different inertial frames agree on the physics. That will lead us to an obvious correction that is, qualitatively, a prediction of (linearized) general relativity. 12.1 Newtonian Gravity We start with the experimental observation that for a particle of mass M and another of mass m, the force of gravitational attraction between them, according to Newton, is (see Figure 12.1): G M m F = − RR^ ≡ r − r 0: (12.1) r 2 From the force, we can, by analogy with electrostatics, construct the New- tonian gravitational field and its associated point potential: GM GM G = − R^ = −∇ − : (12.2) r 2 r | {z } ≡φ 1 of 7 12.2. LINES OF MASS Lecture 12 zˆ m !r M !r ! yˆ xˆ Figure 12.1: Two particles interacting via the Newtonian gravitational force. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Supplemental Lecture 5 Precession in Special and General Relativity
Supplemental Lecture 5 Thomas Precession and Fermi-Walker Transport in Special Relativity and Geodesic Precession in General Relativity Abstract This lecture considers two topics in the motion of tops, spins and gyroscopes: 1. Thomas Precession and Fermi-Walker Transport in Special Relativity, and 2. Geodesic Precession in General Relativity. A gyroscope (“spin”) attached to an accelerating particle traveling in Minkowski space-time is seen to precess even in a torque-free environment. The angular rate of the precession is given by the famous Thomas precession frequency. We introduce the notion of Fermi-Walker transport to discuss this phenomenon in a systematic fashion and apply it to a particle propagating on a circular orbit. In a separate discussion we consider the geodesic motion of a particle with spin in a curved space-time. The spin necessarily precesses as a consequence of the space-time curvature. We illustrate the phenomenon for a circular orbit in a Schwarzschild metric. Accurate experimental measurements of this effect have been accomplished using earth satellites carrying gyroscopes. This lecture supplements material in the textbook: Special Relativity, Electrodynamics and General Relativity: From Newton to Einstein (ISBN: 978-0-12-813720-8). The term “textbook” in these Supplemental Lectures will refer to that work. Keywords: Fermi-Walker transport, Thomas precession, Geodesic precession, Schwarzschild metric, Gravity Probe B (GP-B). Introduction In this supplementary lecture we discuss two instances of precession: 1. Thomas precession in special relativity and 2. Geodesic precession in general relativity. To set the stage, let’s recall a few things about precession in classical mechanics, Newton’s world, as we say in the textbook. -

Derivation of Generalized Einstein's Equations of Gravitation in Some
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 5 February 2021 doi:10.20944/preprints202102.0157.v1 Derivation of generalized Einstein's equations of gravitation in some non-inertial reference frames based on the theory of vacuum mechanics Xiao-Song Wang Institute of Mechanical and Power Engineering, Henan Polytechnic University, Jiaozuo, Henan Province, 454000, China (Dated: Dec. 15, 2020) When solving the Einstein's equations for an isolated system of masses, V. Fock introduces har- monic reference frame and obtains an unambiguous solution. Further, he concludes that there exists a harmonic reference frame which is determined uniquely apart from a Lorentz transformation if suitable supplementary conditions are imposed. It is known that wave equations keep the same form under Lorentz transformations. Thus, we speculate that Fock's special harmonic reference frames may have provided us a clue to derive the Einstein's equations in some special class of non-inertial reference frames. Following this clue, generalized Einstein's equations in some special non-inertial reference frames are derived based on the theory of vacuum mechanics. If the field is weak and the reference frame is quasi-inertial, these generalized Einstein's equations reduce to Einstein's equa- tions. Thus, this theory may also explain all the experiments which support the theory of general relativity. There exist some differences between this theory and the theory of general relativity. Keywords: Einstein's equations; gravitation; general relativity; principle of equivalence; gravitational aether; vacuum mechanics. I. INTRODUCTION p. 411). Theoretical interpretation of the small value of Λ is still open [6]. The Einstein's field equations of gravitation are valid 3. -

PHYS 402: Electricity & Magnetism II
PHYS 610: Electricity & Magnetism I Due date: Thursday, February 1, 2018 Problem set #2 1. Adding rapidities Prove that collinear rapidities are additive, i.e. if A has a rapidity relative to B, and B has rapidity relative to C, then A has rapidity + relative to C. 2. Velocity transformation Consider a particle moving with velocity 푢⃗ = (푢푥, 푢푦, 푢푧) in frame S. Frame S’ moves with velocity 푣 = 푣푧̂ in S. Show that the velocity 푢⃗ ′ = (푢′푥, 푢′푦, 푢′푧) of the particle as measured in frame S’ is given by the following expressions: 푑푥′ 푢푥 푢′푥 = = 2 푑푡′ 훾(1 − 푣푢푧/푐 ) 푑푦′ 푢푦 푢′푦 = = 2 푑푡′ 훾(1 − 푣푢푧/푐 ) 푑푧′ 푢푧 − 푣 푢′푧 = = 2 푑푡′ (1 − 푣푢푧/푐 ) Note that the velocity components perpendicular to the frame motion are transformed (as opposed to the Lorentz transformation of the coordinates of the particle). What is the physics for this difference in behavior? 3. Relativistic acceleration Jackson, problem 11.6. 4. Lorenz gauge Show that you can always find a gauge function 휆(푟 , 푡) such that the Lorenz gauge condition is satisfied (you may assume that a wave equation with an arbitrary source term is solvable). 5. Relativistic Optics An astronaut in vacuum uses a laser to produce an electromagnetic plane wave with electric amplitude E0' polarized in the y'-direction travelling in the positive x'-direction in an inertial reference frame S'. The astronaut travels with velocity v along the +z-axis in the S inertial frame. a) Write down the electric and magnetic fields for this propagating plane wave in the S' inertial frame – you are free to pick the phase convention. -

Mach's Principle: Exact Frame
MACH’S PRINCIPLE: EXACT FRAME-DRAGGING BY ENERGY CURRENTS IN THE UNIVERSE CHRISTOPH SCHMID Institute of Theoretical Physics, ETH Zurich CH-8093 Zurich, Switzerland We show that the dragging of axis directions of local inertial frames by a weighted average of the energy currents in the universe (Mach’s postulate) is exact for all linear perturbations of all Friedmann-Robertson-Walker universes. 1 Mach’s Principle 1.1 The Observational Fact: ’Mach zero’ The time-evolution of local inertial axes, i.e. the local non-rotating frame is experimentally determined by the spin axes of gyroscopes, as in inertial guidance systems in airplanes and satellites. This is true both in Newtonian physics (Foucault 1852) and in General Relativity. It is an observational fact within present-day accuracy that the spin axes of gyroscopes do not precess relative to quasars. This observational fact has been named ’Mach zero’, where ’zero’ designates that this fact is not yet Mach’s principle, it is just the observational starting point. — There is an extremely small dragging effect by the rotating Earth on the spin axes of gyroscopes, the Lense - Thirring effect, which makes the spin axes of gyroscopes precess relative to quasars by 43 milli-arc-sec per year. It is hoped that one will be able to detect this effect by further analysis of the data which have been taken by Gravity Probe B. 1.2 The Question What physical cause explains the observational fact ’Mach zero’ ? Equivalently: What physical cause determines the time-evolution of gyroscope axes ? In the words of John A. -

The Lorentz Transformation
The Lorentz Transformation Karl Stratos 1 The Implications of Self-Contained Worlds It sucks to have an upper bound of light speed on velocity (especially for those who demand space travel). Being able to loop around the globe seven times and a half in one second is pretty fast, but it's still far from infinitely fast. Light has a definite speed, so why can't we just reach it, and accelerate a little bit more? This unfortunate limitation follows from certain physical facts of the universe. • Maxwell's equations enforce a certain speed for light waves: While de- scribing how electric and magnetic fields interact, they predict waves that move at around 3 × 108 meters per second, which are established to be light waves. • Inertial (i.e., non-accelerating) frames of reference are fully self-contained, with respect to the physical laws: For illustration, Galileo observed in a steadily moving ship that things were indistinguishable from being on terra firma. The physical laws (of motion) apply exactly the same. People concocted a medium called the \aether" through which light waves trav- eled, like sound waves through the air. But then inertial frames of reference are not self-contained, because if one moves at a different velocity from the other, it will experience a different light speed with respect to the common aether. This violates the results from Maxwell's equations. That is, light beams in a steadily moving ship will be distinguishable from being on terra firma; the physical laws (of Maxwell's equations) do not apply the same. -

Space, Time, and Spacetime
Fundamental Theories of Physics 167 Space, Time, and Spacetime Physical and Philosophical Implications of Minkowski's Unification of Space and Time Bearbeitet von Vesselin Petkov 1. Auflage 2010. Buch. xii, 314 S. Hardcover ISBN 978 3 642 13537 8 Format (B x L): 15,5 x 23,5 cm Gewicht: 714 g Weitere Fachgebiete > Physik, Astronomie > Quantenphysik > Relativität, Gravitation Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. The Experimental Verdict on Spacetime from Gravity Probe B James Overduin Abstract Concepts of space and time have been closely connected with matter since the time of the ancient Greeks. The history of these ideas is briefly reviewed, focusing on the debate between “absolute” and “relational” views of space and time and their influence on Einstein’s theory of general relativity, as formulated in the language of four-dimensional spacetime by Minkowski in 1908. After a brief detour through Minkowski’s modern-day legacy in higher dimensions, an overview is given of the current experimental status of general relativity. Gravity Probe B is the first test of this theory to focus on spin, and the first to produce direct and unambiguous detections of the geodetic effect (warped spacetime tugs on a spin- ning gyroscope) and the frame-dragging effect (the spinning earth pulls spacetime around with it). -

Physical Holonomy, Thomas Precession, and Clifford Algebra
hXWWM UWThPh 1988-39 Physical Holonomy, Thomas Precession, and Clifford Algebra H. Urbantke Institut für Theoretische Physik Universität Wien Abstract After a general discussion of the physical significance of holonomy group transfor mations, a relation between the transports of Fermi-Walker and Levi-Civitä in Special Relativity is pointed out. A well-known example - the Thomas-Wigner angle - is red- erived in a completely frame-independent manner using Clifford algebra. 1 Introduction — Holonomy Groups in Physics Quantum Holonomy has become a rather popular concept in recent /ears, in particular through the work [1] of Berry and Simon; but it is clear that the Aharanov-Bohm effect [2] is a much earlier instance of it. The point is that here the differential geometric idea of parallel transport defined by connections in fibre bundles [3] attains rather direct physical meaning susceptible to experimentation. This is remarkable because parallel transport has been around in differential geometry since 1917, and differential geometry has invaded theoretical physics since the early days of General Relativity, with new impulses coming from Hamiltonian dynamics and gauge theory: yet the significance of connections used to be formal, the 'transformation properties' standing in the forefront, as one can see from the old 'Ricci-Calculus' as used by Einstein and Grossmann [4] or from the way non- abelian gauge fields were introduced by Yang and Mills [5]. The rather indirect 'physical' realization of parallel transport in General Relativity by Schild's 'ladder construction' [6] also stresses this fact; in non-abelian gauge theory I am aware of no physical realization at all. -

Arxiv:Gr-Qc/0507001V3 16 Oct 2005
October 29, 2018 21:28 WSPC/INSTRUCTION FILE ijmp˙october12 International Journal of Modern Physics D c World Scientific Publishing Company Gravitomagnetism and the Speed of Gravity Sergei M. Kopeikin Department of Physics and Astronomy, University of Missouri-Columbia, Columbia, Missouri 65211, USA [email protected] Experimental discovery of the gravitomagnetic fields generated by translational and/or rotational currents of matter is one of primary goals of modern gravitational physics. The rotational (intrinsic) gravitomagnetic field of the Earth is currently measured by the Gravity Probe B. The present paper makes use of a parametrized post-Newtonian (PN) expansion of the Einstein equations to demonstrate how the extrinsic gravitomag- netic field generated by the translational current of matter can be measured by observing the relativistic time delay caused by a moving gravitational lens. We prove that mea- suring the extrinsic gravitomagnetic field is equivalent to testing relativistic effect of the aberration of gravity caused by the Lorentz transformation of the gravitational field. We unfold that the recent Jovian deflection experiment is a null-type experiment testing the Lorentz invariance of the gravitational field (aberration of gravity), thus, confirming existence of the extrinsic gravitomagnetic field associated with orbital motion of Jupiter with accuracy 20%. We comment on erroneous interpretations of the Jovian deflection experiment given by a number of researchers who are not familiar with modern VLBI technique and subtleties of JPL ephemeris. We propose to measure the aberration of gravity effect more accurately by observing gravitational deflection of light by the Sun and processing VLBI observations in the geocentric frame with respect to which the Sun arXiv:gr-qc/0507001v3 16 Oct 2005 is moving with velocity ∼ 30 km/s. -
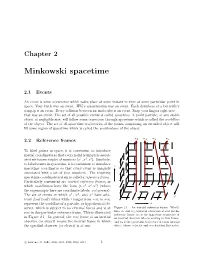
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame.