Priniciples of Heterodyne Detection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Toward a Large Bandwidth Photonic Correlator for Infrared Heterodyne Interferometry a first Laboratory Proof of Concept
A&A 639, A53 (2020) Astronomy https://doi.org/10.1051/0004-6361/201937368 & c G. Bourdarot et al. 2020 Astrophysics Toward a large bandwidth photonic correlator for infrared heterodyne interferometry A first laboratory proof of concept G. Bourdarot1,2, H. Guillet de Chatellus2, and J-P. Berger1 1 Univ. Grenoble Alpes, CNRS, IPAG, 38000 Grenoble, France e-mail: [email protected] 2 Univ. Grenoble Alpes, CNRS, LIPHY, 38000 Grenoble, France Received 19 December 2019 / Accepted 17 May 2020 ABSTRACT Context. Infrared heterodyne interferometry has been proposed as a practical alternative for recombining a large number of telescopes over kilometric baselines in the mid-infrared. However, the current limited correlation capacities impose strong restrictions on the sen- sitivity of this appealing technique. Aims. In this paper, we propose to address the problem of transport and correlation of wide-bandwidth signals over kilometric dis- tances by introducing photonic processing in infrared heterodyne interferometry. Methods. We describe the architecture of a photonic double-sideband correlator for two telescopes, along with the experimental demonstration of this concept on a proof-of-principle test bed. Results. We demonstrate the a posteriori correlation of two infrared signals previously generated on a two-telescope simulator in a double-sideband photonic correlator. A degradation of the signal-to-noise ratio of 13%, equivalent to a noise factor NF = 1:15, is obtained through the correlator, and the temporal coherence properties of our input signals are retrieved from these measurements. Conclusions. Our results demonstrate that photonic processing can be used to correlate heterodyne signals with a potentially large increase of detection bandwidth. -

AM Series AGILE MODULATOR
AM Series AGILE MODULATOR AM series is a family of frequency-agile analog audio/video modulators. AM-60-860, the flag-ship model, is available in NTSC C channels 2-135 (54-860 MHz), and the PAL B, G, and I channels in the same frequency range. A More economical models are available in NTSC for the frequency ranges 54-550 MHz, or 54-806 MHz. EAS (Emergency Alert System) is standard on all models. Stereo Audio, SAP (Secondary Audio Programming), and several other optional T features are also available. V Baseband Audio/Video P R O D U Modulated C Analog RF T S Ordering Information Model Stock # Description AM-60-860 59415A Frequency-agile Audio/Video Modulator, +60 dBmV, 54-860 MHz (NTSC) AM-60-806 59419 Frequency-agile Audio/Video Modulator, +60 dBmV, 54-806 MHz (NTSC) AM-60-550 59416 Frequency-agile Audio/Video Modulator, +60 dBmV, 54-550 MHz (NTSC) AM-45-550 59404 Frequency-agile Audio/Video Modulator, +45 dBmV, 54-550 MHz (NTSC) Options AM-OPT-02 BNC Video Input Connector AM-OPT-04 Sub-Band Output (Available with AM-60-550 only) AM-OPT-05 Integrated BTSC Stereo Audio AM-OPT-06 SAP Audio/ BTSC Stereo (Available with AM-60-860 only) products AM-OPT-07 Video AGC CATV AM-OPT-09 Balanced Audio Input, 600 Ohm (Standard on AM-60-860) Related Products Model Description AMCM Frequency-agile Audio/Video modulator, +45 dBmV, 54-860 MHz (NTSC & PAL), Twelve modulators in 2RU modulators freq. agile ACM Frequency-agile Audio/Video modulator, +45 dBmV, 54-806 MHz (NTSC only), Twelve modulators in 2RU MICM Fixed-channel Audio/Video modulator, +45 dBmV, 54-806 MHz (NTSC & PAL), Twelve modulators in 2RU www.blondertongue.com | 800-523-6049 76 Specifications Input Output Connector Connector: “F” Female Standard: “F” Female Impedance: 75 Ω Option 2: BNC Female Impedance: 75 Ω Return Loss: 12 dB Return Loss: 18 dB Frequency Range Video Input Level AM-60-860 Model: 54 to 860 MHz (NTSC CATV Ch. -

Army Radio Communication in the Great War Keith R Thrower, OBE
Army radio communication in the Great War Keith R Thrower, OBE Introduction Prior to the outbreak of WW1 in August 1914 many of the techniques to be used in later years for radio communications had already been invented, although most were still at an early stage of practical application. Radio transmitters at that time were predominantly using spark discharge from a high voltage induction coil, which created a series of damped oscillations in an associated tuned circuit at the rate of the spark discharge. The transmitted signal was noisy and rich in harmonics and spread widely over the radio spectrum. The ideal transmission was a continuous wave (CW) and there were three methods for producing this: 1. From an HF alternator, the practical design of which was made by the US General Electric engineer Ernst Alexanderson, initially based on a specification by Reginald Fessenden. These alternators were primarily intended for high-power, long-wave transmission and not suitable for use on the battlefield. 2. Arc generator, the practical form of which was invented by Valdemar Poulsen in 1902. Again the transmitters were high power and not suitable for battlefield use. 3. Valve oscillator, which was invented by the German engineer, Alexander Meissner, and patented in April 1913. Several important circuits using valves had been produced by 1914. These include: (a) the heterodyne, an oscillator circuit used to mix with an incoming continuous wave signal and beat it down to an audible note; (b) the detector, to extract the audio signal from the high frequency carrier; (c) the amplifier, both for the incoming high frequency signal and the detected audio or the beat signal from the heterodyne receiver; (d) regenerative feedback from the output of the detector or RF amplifier to its input, which had the effect of sharpening the tuning and increasing the amplification. -
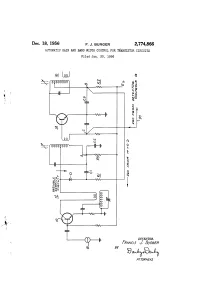
Dec. 18, 1956 . F. J. BURGER 2,774,866 Firancis. J. B/RGER
Dec. 18, 1956 . F. J. BURGER 2,774,866 AUTOMATIC GAIN AND BAND WIDTH CONTROL FORTRANSISTOR CIRCUITS Filed Jan. 30, 1956 s log 00 0 0-0 000 & S. l INVENTOR, firANCIS. J. B/RGER 9. BY alid. A77ORNEYs 2,774,866 United States Patent Office Patented Dec. 18, 1956 2 reduced gain conditions. In order to prevent such dis tortion some means is required to reduce the signal level 2,774,866 prior to its application to the first intermediate frequency stage. In addition to the distortion problem, as is known, AUTOMATIC GAN AND BAND WIDTH CONTROL 5 the band width of the intermediate frequency amplifier FORTRANSISTOR CIRCUITS varies as a function of the magnitude of the automatic Francis J. Burger, Leonia, N. J., assignior to Enuerson gain controi voltage. As the gain of the transistor is Radio & Phonograph Corporation, Jersey City, N. , reduced, the loading which it presents to the intermediate a corporation of New York frequency coils decreases, thus increasing the Q of the O circuit and narrowing the band width. There also results Application January 30, 1956, Serial No. 562,072 a change in reactive loading provided by the I. F. tran 6 Claims. (C. 250-20) sistor which causes the intermediate frequency coils to shift their frequency center to a higher value. The purpose of this invention is to provide a variable This invention relates to improvements in transistor damping system which will vary the primary damping circuits, particularly transistor radio receivers with re of the converter intermediate frequency coil as a func spect to means for providing automatic gain and band tion of the automatic gain control voltage. -

Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10
EE447 Lecture 6 Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10 HW7;5-4,5-7,5-13a-d,5-23,5-31 Due next Monday, 29th 1 Figure 4–29 Superheterodyne receiver. m(t) 2 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 1 EE447 Lecture 6 Synchronous Demodulation s(t) LPF m(t) 2Cos(2πfct) •Only method for DSB-SC, USB-SC, LSB-SC •AM with carrier •Envelope Detection – Input SNR >~10 dB required •Synchronous Detection – (no threshold effect) •Note the 2 on the LO normalizes the output amplitude 3 Figure 4–24 PLL used for coherent detection of AM. 4 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 2 EE447 Lecture 6 Envelope Detector C • Ac • (1+ a • m(t)) Where C is a constant C • Ac • a • m(t)) 5 Envelope Detector Distortion Hi Frequency m(t) Slope overload IF Frequency Present in Output signal 6 3 EE447 Lecture 6 Superheterodyne Receiver EE445-09 7 8 4 EE447 Lecture 6 9 Super-Heterodyne AM Receiver 10 5 EE447 Lecture 6 Super-Heterodyne AM Receiver 11 RF Filter • Provides Image Rejection fimage=fLO+fif • Reduces amplitude of interfering signals far from the carrier frequency • Reduces the amount of LO signal that radiates from the Antenna stop 2/22 12 6 EE447 Lecture 6 Figure 4–30 Spectra of signals and transfer function of an RF amplifier in a superheterodyne receiver. 13 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. -

Design Considerations for Optical Heterodyne
DESIGNCONSIDERATIONS FOR OPTICAL HETERODYNERECEIVERS: A RFXIEW John J. Degnan Instrument Electro-optics Branch NASA GoddardSpace Flight Center Greenbelt,Maryland 20771 ABSTRACT By its verynature, an optical heterodyne receiver is both a receiver and anantenna. Certain fundamental antenna properties ofheterodyne receivers are describedwhich set theoretical limits on the receiver sensitivity for the detectionof coherent point sources, scattered light, and thermal radiation. In order to approachthese limiting sensitivities, the geometry of the optical antenna-heterodyne receiver configurationmust be carefully tailored to the intendedapplication. The geometric factors which affect system sensitivity includethe local osciliator (LO) amplitudedistribution, mismatches between the signaland LO phasefronts,central obscurations of the optical antenna, and nonuniformmixer quantum efficiencies. The current state of knowledge in this area, which rests heavilyon modern concepts of partial coherence, is reviewed. Following a discussion of noiseprocesses in the heterodyne receiver and the manner in which sensitivity is increasedthrough time integration of the detectedsignal, we derivean expression for the mean squaresignal current obtained by mixing a coherent local oscillator with a partially coherent, quasi- monochromaticsource. We thendemonstrate the manner in which the IF signal calculationcan be transferred to anyconvenient plane in the optical front end ofthe receiver. Using these techniques, we obtain a relativelysimple equation forthe coherently detected signal from anextended incoherent source and apply it to theheterodyne detection of an extended thermal source and to theback- scatter lidar problem where the antenna patternsof both the transmitter beam andheterodyne receiver mustbe taken into account. Finally, we considerthe detectionof a coherentsource and, in particular, a distantpoint source such as a star or laser transmitter in a longrange heterodyne communications system. -

En 300 720 V2.1.0 (2015-12)
Draft ETSI EN 300 720 V2.1.0 (2015-12) HARMONISED EUROPEAN STANDARD Ultra-High Frequency (UHF) on-board vessels communications systems and equipment; Harmonised Standard covering the essential requirements of article 3.2 of the Directive 2014/53/EU 2 Draft ETSI EN 300 720 V2.1.0 (2015-12) Reference REN/ERM-TG26-136 Keywords Harmonised Standard, maritime, radio, UHF ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice The present document can be downloaded from: http://www.etsi.org/standards-search The present document may be made available in electronic versions and/or in print. The content of any electronic and/or print versions of the present document shall not be modified without the prior written authorization of ETSI. In case of any existing or perceived difference in contents between such versions and/or in print, the only prevailing document is the print of the Portable Document Format (PDF) version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: https://portal.etsi.org/People/CommiteeSupportStaff.aspx Copyright Notification No part may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm except as authorized by written permission of ETSI. -

Heterodyne Detector for Measuring the Characteristic of Elliptically Polarized Microwaves
Downloaded from orbit.dtu.dk on: Oct 02, 2021 Heterodyne detector for measuring the characteristic of elliptically polarized microwaves Leipold, Frank; Nielsen, Stefan Kragh; Michelsen, Susanne Published in: Review of Scientific Instruments Link to article, DOI: 10.1063/1.2937651 Publication date: 2008 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Leipold, F., Nielsen, S. K., & Michelsen, S. (2008). Heterodyne detector for measuring the characteristic of elliptically polarized microwaves. Review of Scientific Instruments, 79(6), 065103. https://doi.org/10.1063/1.2937651 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Users may download and print one copy of any publication from the public portal for the purpose of private study or research. You may not further distribute the material or use it for any profit-making activity or commercial gain You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. REVIEW OF SCIENTIFIC INSTRUMENTS 79, 065103 ͑2008͒ Heterodyne detector for measuring the characteristic of elliptically polarized microwaves Frank Leipold, Stefan Nielsen, and Susanne Michelsen Association EURATOM, Risø National Laboratory, Technical University of Denmark, OPL-128, Frederiksborgvej 399, 4000 Roskilde, Denmark ͑Received 28 January 2008; accepted 6 May 2008; published online 4 June 2008͒ In the present paper, a device is introduced, which is capable of determining the three characteristic parameters of elliptically polarized light ͑ellipticity, angle of ellipticity, and direction of rotation͒ for microwave radiation at a frequency of 110 GHz. -

Before Valve Amplification) Page 1 of 15 Before Valve Amplification - Wireless Communication of an Early Era
(Before Valve Amplification) Page 1 of 15 Before Valve Amplification - Wireless Communication of an Early Era by Lloyd Butler VK5BR At the turn of the century there were no amplifier valves and no transistors, but radio communication across the ocean had been established. Now we look back and see how it was done and discuss the equipment used. (Orininally published in the journal "Amateur Radio", July 1986) INTRODUCTION In the complex electronics world of today, where thousands of transistors junctions are placed on a single silicon chip, we regard even electron tube amplification as being from a bygone era. We tend to associate the early development of radio around the electron tube as an amplifier, but we should not forget that the pioneers had established radio communications before that device had been discovered. This article examines some of the equipment used for radio (or should we say wireless) communications of that day. Discussion will concentrate on the equipment used and associated circuit descriptions rather than the history of its development. Anyone interested in history is referred to a thesis The Historical Development of Radio Communications by J R Cox VK6NJ published as a series in Amateur Radio, from December 1964 to June 1965. Over the years, some of the early terms used have given-way to other commonly used ones. Radio was called wireless, and still is to some extent. For example, it is still found in the name of our own representative body, the W1A. Electro Magnetic (EM) Waves were called hertzian waves or ether waves and the medium which supported them was known as the ether. -

Superheterodyne Receiver
Superheterodyne Receiver The received RF-signals must transformed in a videosignal to get the wanted informations from the echoes. This transformation is made by a super heterodyne receiver. The main components of the typical superheterodyne receiver are shown on the following picture: Figure 1: Block diagram of a Superheterodyne The superheterodyne receiver changes the rf frequency into an easier to process lower IF- frequency. This IF- frequency will be amplified and demodulated to get a videosignal. The Figure shows a block diagram of a typical superheterodyne receiver. The RF-carrier comes in from the antenna and is applied to a filter. The output of the filter are only the frequencies of the desired frequency-band. These frequencies are applied to the mixer stage. The mixer also receives an input from the local oscillator. These two signals are beat together to obtain the IF through the process of heterodyning. There is a fixed difference in frequency between the local oscillator and the rf-signal at all times by tuning the local oscillator. This difference in frequency is the IF. this fixed difference an ganged tuning ensures a constant IF over the frequency range of the receiver. The IF-carrier is applied to the IF-amplifier. The amplified IF is then sent to the detector. The output of the detector is the video component of the input signal. Image-frequency Filter A low-noise RF amplifier stage ahead of the converter stage provides enough selectivity to reduce the image-frequency response by rejecting these unwanted signals and adds to the sensitivity of the receiver. -

A Polarization-Insensitive Recirculating Delayed Self-Heterodyne Method for Sub-Kilohertz Laser Linewidth Measurement
hv photonics Communication A Polarization-Insensitive Recirculating Delayed Self-Heterodyne Method for Sub-Kilohertz Laser Linewidth Measurement Jing Gao 1,2,3 , Dongdong Jiao 1,3, Xue Deng 1,3, Jie Liu 1,3, Linbo Zhang 1,2,3 , Qi Zang 1,2,3, Xiang Zhang 1,2,3, Tao Liu 1,3,* and Shougang Zhang 1,3 1 National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China; [email protected] (J.G.); [email protected] (D.J.); [email protected] (X.D.); [email protected] (J.L.); [email protected] (L.Z.); [email protected] (Q.Z.); [email protected] (X.Z.); [email protected] (S.Z.) 2 University of Chinese Academy of Sciences, Beijing 100039, China 3 Key Laboratory of Time and Frequency Standards, Chinese Academy of Sciences, Xi’an 710600, China * Correspondence: [email protected]; Tel.: +86-29-8389-0519 Abstract: A polarization-insensitive recirculating delayed self-heterodyne method (PI-RDSHM) is proposed and demonstrated for the precise measurement of sub-kilohertz laser linewidths. By a unique combination of Faraday rotator mirrors (FRMs) in an interferometer, the polarization-induced fading is effectively reduced without any active polarization control. This passive polarization- insensitive operation is theoretically analyzed and experimentally verified. Benefited from the recirculating mechanism, a series of stable beat spectra with different delay times can be measured simultaneously without changing the length of delay fiber. Based on Voigt profile fitting of high- order beat spectra, the average Lorentzian linewidth of the laser is obtained. The PI-RDSHM has advantages of polarization insensitivity, high resolution, and less statistical error, providing an Citation: Gao, J.; Jiao, D.; Deng, X.; effective tool for accurate measurement of sub-kilohertz laser linewidth. -

History of Naval Ships Wireless Systems I
History of Naval Ships Wireless Systems I 1890’s to the 1920’s Wireless telegraphy was introduced in to the RN in 1897 by Marconi and Captain HB Jackson, a Torpedo specialist. There was no way to measure wavelength and tuning was in its infancy. Transmission was achieved by use of a spark gap transmitter and the frequency was dependent upon the size and configuration of the aerial. As a result, there was only one wireless channel as the electromagnetic energy leaving the antenna would cover an extremely wide frequency band. The receiver consisted of a similar aerial and the use of a "coherer" which detected EM waves. A battery operated circuit then operated a telegraph "inker" which displayed the signal visually on tape. There was no means of tuning the receiver except to make the aerial the same size as that of the transmitter. It could not distinguish between atmospherics and signals and if two stations transmitted at once, the result was a jumble of unintelligible marks on the tape. There was a notable characteristic about the spark gap transmitter. On reception, each signal sounded just a little bit different than the rest. This signal characteristic was usually determined by electrode gap spacings, electrode shapes, and power levels inherent to each transmitter. With a little practice, one could attach an identity to the transmitting station based on the sound in the headphones. From a security viewpoint, this was not good for any navy, as a ship could eventually be identified by the tone of its transmitted signal. On the other hand, this signal trait was a blessing, otherwise, there would have been no hope of communication as 'spark' produced signals were extremely wide.