Optimisation of the Spoked Bicycle Wheel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Canadian Rockies & Montana Packing List
Canadian Rockies & Montana Packing List Things to Know • Students should bring at least two reusable face masks on their trip. Overland will provide one additional mask. • Your group will have access to laundry periodically. • Please do not bring your smartphone (or any other electronics). • Do not bring any type of knife or multi-tool (such as a Swiss Army knife or Leatherman tool). • A high-visibility outer layer is required at all times while biking. See packing descriptions for more details. • If you are flying to your trip, pack your sleeping pad and bike shoes in your bike box or checked bag. Take your helmet and sleeping bag with you on the plane as carry-on items, in case your checked luggage fails to arrive on time. Pack all remaining items in your checked duffel bag or in your checked panniers. • There are no reimbursements for lost, damaged or stolen items. Participants Arriving Sick or Injured: Participants should not be dropped off or fly to trip start if they are sick or injured. Participants should remain at home until they are no longer ill and are fully recovered from any illness or injury. Sick or injured participants arriving for trip start must remain with the drop off parent/guardian or be flown home at the parent/guardian's expense. Please notify our office as soon as possible if your child is sick or injured. Your child may or may not be able to join the group at a later date. Please review the details of your trip insurance policy for illness and injury coverage benefits. -

How to Build a 36 Spoke Bicycle Wheel
How to build a 36 spoke bicycle wheel. You’ll need: Hub & rim (for 36 spokes) 36 spokes & nipples. Spoke wrench & small flat screwdriver) How it’s done: 1.1) Insert spokes into every other hole on one side of the hub - spokes turning towards hub. 1.2) Locate the valve hole (the only hole larger than the others). Insert a random spoke into the hole right next to the valvehole, on the right side and screw on a nipple - be Figure 1.2 sure to only screw on a few turns, using your fingers or a small screwdriver Insert the next spoke into the forth hole, from the one you’ve just used. (See figure 1.2) 1 2 Flip “wheel”. 2.1) As 1.1, but be sure to place the spokes, just right of the spokes on the other side of the hub. This part is very important. 2,2) Insert spokes, starting at the valvehole (again), just right of the spokes from the other side. (See figure 2.2) Figure 2.2 3 Flip “wheel”. 3.1) Insert spokes in the last 9 holes. This time away from the hub. 3.2) Twist hub towards left. Spokes will turn left towards the rim, instead of straight. Follow the pattern “Over, over, under and skip a hole” (there’ll be only two holes left for the spoke to fit in) to insert the spokes in the rim. The spokes should turn the opposite direction of the ones already in the rim. (See figure 3.2) Figure 3.2 Over red and blue, under red, skip a hole. -

Bicycle Manual Road Bike
PURE CYCLING MANUAL ROAD BIKE 1 13 14 2 3 15 4 a 16 c 17 e b 5 18 6 19 7 d 20 8 21 22 23 24 9 25 10 11 12 26 Your bicycle and this manual comply with the safety requirements of the EN ISO standard 4210-2. Important! Assembly instructions in the Quick Start Guide supplied with the road bike. The Quick Start Guide is also available on our website www.canyon.com Read pages 2 to 10 of this manual before your first ride. Perform the functional check on pages 11 and 12 of this manual before every ride! TABLE OF CONTENTS COMPONENTS 2 General notes on this manual 67 Checking and readjusting 4 Intended use 67 Checking the brake system 8 Before your first ride 67 Vertical adjustment of the brake pads 11 Before every ride 68 Readjusting and synchronising 1 Frame: 13 Stem 13 Notes on the assembly from the BikeGuard 69 Hydraulic disc brakes a Top tube 14 Handlebars 16 Packing your Canyon road bike 69 Brakes – how they work and what to do b Down tube 15 Brake/shift lever 17 How to use quick-releases and thru axles about wear c Seat tube 16 Headset 17 How to securely mount the wheel with 70 Adjusting the brake lever reach d Chainstay 17 Fork quick-releases 71 Checking and readjusting e Rear stay 18 Front brake 19 How to securely mount the wheel with 73 The gears 19 Brake rotor thru axles 74 The gears – How they work and how to use 2 Saddle 20 Drop-out 20 What to bear in mind when adding them 3 Seat post components or making changes 76 Checking and readjusting the gears 76 Rear derailleur 4 Seat post clamp Wheel: 21 Special characteristics of carbon 77 -
Electronic Automatic Transmission for Bicycle Design Document
Electronic Automatic Transmission for Bicycle Design Document Tianqi Liu, Ruijie Qi, and Xingkai Zhou Team 4 ECE 445 – Spring 2018 TA: Hershel Rege 1 Introduction 1.1 Objective Nowadays, an increasing number of people commute by bicycles in US. With the development of technology, bicycles that equipped with the transmission system including chain rings, front derailleur, cassettes, and rear derailleur, are more and more widespread. However, it is a challenging thing for most bikers to decide which is the optimal gear under various circumstances and when to change gear. Thus, electronic automatic transmission for bicycle can satisfy the need of most inexperienced bikers. There are three main advantages to use with automatic transmission system. Firstly, it can make your journey more comfortably. Except for expert bikers, many people cannot select the right gear unconsciously. Moreover, with so many traffic signals and stop signs in the city, bikers have to change gears very frequently to stop and restart. However, with this system equipped in the bicycle, bikers can only think about pedalling. Secondly, electronic automatic gear shifting system can guarantee bikers a safer journey. It is dangerous for a rider to shift gears manually under some specific conditions such as braking, accelerating. Thirdly, bikers can ride more efficiently. With the optimal gear ready, the riders could always paddle at an efficient range of cadence. For those inexperienced riders who choose the wrong gears, they will either paddle too slow which could exhaust themselves quickly or paddle too fast which makes the power delivery inefficiently. Bicycle changes gears by pulling or releasing a metal cable connected to the derailleurs. -
MTB Wheelset Installation Instructions .Pdf
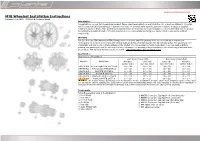
MTB Wheelset Installation Instructions Published – Oct, 2015. ZS175.v1 © Full Speed Ahead Introduction Congratulations on your Full Speed Ahead product. Please read these instructions and follow them for correct use. Failure to follow the warnings and instructions could result in damage to product not covered under warranty, damage to bicycle; or cause an accident resulting in injury or death. Since specific tools and experience are necessary for proper installation, it is recommended that the product be installed by a qualified bicycle technician. FSA assumes no responsibility for damages or injury related to improperly installed components. Warranty Full Speed Ahead (FSA) warrants all FSA, Gravity, Vision, Metropolis and RPM products to be free from defects in materials or workmanship for a period of two years after original purchase unless otherwise stated in the full warranty policy. The warranty is non- transferable and valid to the original purchaser of the product only. Any attempt to modify the product in any way such as drilling, grinding, and painting will void the warranty. For more information on warranty policy and instructions for completing a warranty claim, check out the Full Warranty Policy found at our website: http://www.fullspeedahead.com/techdoc Specification Item Number / Model Name Front spoke tension (kfg) Rear Spoke tension (kgf) Model No. Model Name Non-drive Drive side Drive side Non-drive (w/disc brake) (w/o disc brake) (w/o disc brake) (w/disc brake) WH-TX-910 K-Force Light MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-920 K-Force Light MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-905 SL-K MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-915 SL-K MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-908 Afterburner MTB 27.5”/650b 100 – 120 100 – 120 110 – 130 80 – 100 WH-TX-918 Afterburner MTB 29”/700c 100 – 120 100 – 120 110 – 130 80 – 100 Use a spoke tension measuring device to follow the tension specification as in the above chart. -

Dualdrive Ins Edfnldksv 12/02
operating instructions betriebsanleitung notice d’utilisation handleiding brugsanvisning bruksanvisning These instructions contain important Please take particular note of the information on your DualDrive following: system. Precautionary measures, Cycling with DualDrive is easy. It’s which protect from possible true. It may surprise you just how accident, injury or danger to many features your DualDrive life, or which prevent possible system has. damage to the bicycle. To make the best possible use of your DualDrive please take the time to read these operating instructions Special advice to assist in carefully. the better handling of the operation, control and adjust- Your DualDrive system is almost ment procedures. maintenance-free. Should you have any queries that are not answered in these operating instructions, your qualified bicycle specialist will be © Copyright SRAM Corporation 2002 pleased to help you. Publ. No. 5000 E/D/F/Nl/Dk/Sv Information may be enhanced without prior notice. Have a nice time and enjoy Released December 2002 ”dualdriving”. SRAM Technical Documentation, Schweinfurt/Germany Shimano is a trademark of Shimano Inc., Japan. 2 DualDrive · December 2002 CONTENTS E THE DUALDRIVE SYSTEM 4 OPERATION 7 MAINTENANCE AND CARE » Gear adjustment 8 » Remove and fit rear wheel 10 » Cleaning and Lubrication 11 » Cable change 12 ASSEMBLY OF COMPONENTS 14 TECHNICAL DATA 18 ADDRESSES 110 DualDrive · December 2002 3 THE DUALDRIVE SYSTEM WHAT IS DUALDRIVE RIDING MODES The general perception is that shifting DualDrive has 3 intuitive shifting requires a Zen-like touch from years modes. Hill mode, standard mode, and of trial and error . mostly error. fast mode. Each mode is designed to Many riders wanted something allow the rider to be in the proper easier. -
2019 2020 Gearup Ctmanual.Pdf
Intentionally left blank INTRODUCTION Welcome to the URAL Motorcycling Family! Your Ural has been built by the Irbit Motorcycle Factory in Russia and distributed by Irbit Motorworks of America, the United States affiliate of the Irbit Motorcycle Factory. This Ural motorcycle conforms to all applicable US Federal Motor Vehicle Safety Standards and US Environmental Protection Agency regulations effective on the date of manufacture. This manual covers the Gear-Up and cT model and has been prepared to acquaint you with the operation, care and maintenance of your motorcycle and to provide you with important safety information. Follow these instructions carefully for maximum motorcycle performance and for your personal motorcycling safety and pleasure. It is critical that a beginning sidecar driver becomes thoroughly familiar with the special operating characteristics of the sidecar outfit before venturing out on busy roads. Your Owner’s Manual contains instructions for operation, maintenance and minor repairs. Major repairs require the attention of a skilled mechanic and the use of special tools and equipment. Your Authorized IMWA Ural Dealer has the facilities, experience and genuine Ural parts necessary to properly render this valuable service. Any suggestions or comments are welcome! Happy Uraling! IMPORTANT SAFTEY INFORMATION WE STRONGLY SUGGEST THAT YOU READ THIS MANUAL COMPLETELY PRIOR TO RIDING YOUR NEW URAL MOTORCYCLE. THIS MANUAL CONTAINS INFORMATION AND ADVICE THAT WILL HELP YOU PROPERLY OPERATE AND MAINTAIN YOUR MOTORCYCLE. PLEASE -

Analytical Model for the Radial Strength and Collapse of The
6th Annual International Cycling Safety Conference 21-22 September 2017, Davis, California, USA Analytical Model for the Radial Strength and Collapse of the Bicycle Wheel Matthew Ford*, Oluwaseyi Balogun# *Department of Mechanical Engineering #Department of Civil & Environmental Engineering Northwestern University Northwestern University 2145 Sheridan Road, Evanston, IL, 60208, USA 2145 Sheridan Road, Evanston, IL, 60208, USA email: [email protected] email: [email protected] Keywords: bicycle wheel, strength, buckling, collapse, crash prevention, finite-element modeling 1 INTRODUCTION The bicycle wheel is a versatile engineering structure which serves many functions including supporting radial and lateral loads, transmitting propulsive torque, and sustaining braking loads. When a wheel is overloaded radially it typically buckles laterally (or “tacos”) which renders the wheel unridable. It is both of theoretical interest and practical importance to develop a theory for the strength—and failure—of the wheel. We analyze the failure mechanisms of tension-spoked wheels using a combination of computational and theoretical approaches. There are two primary failures which both lead to wheel collapse: loss of spoke tension, and lateral buckling of the rim. Designing against either failure mode presents a conflict because increasing spoke tension prevents spokes from going slack, but it also decreases the lateral stiffness of the rim, which is under compression due to the spokes. By analyzing these two modes separately and then equating the critical loads, we develop an expression for the wheel strength which is independent of spoke tension. 2 BUCKLING OF SPOKED WHEELS A bicycle wheel may buckle laterally—or “taco”—due to excessive spoke tension, lateral force, or radial force. -

The Telescope Stand Inspiration for Marcel Duchamp's Bicycle Wheel
Kunstgeschichte. Open Peer Reviewed Journal www.kunstgeschichte-ejournal.net STEPHEN FAWCETT (BALDERTON , NOTTINGHAMSHIRE ) The Telescope Stand Inspiration for Marcel Duchamp’s Bicycle Wheel Readymade Abstract This article is the result of research following on from the author’s previous article on the same subject, ›The Inspiration for Marcel Duchamp’s Bicycle Wheel Readymade‹ written in 2007. In that article the author argued by process of deduction that Duchamp’s Bicycle Wheel was inspired by an improvised telescope stand and was not the product of the artist’s imagination as the artist claimed. This article presents new supporting evidence of a Great War period photograph of an improvised telescope stand made with a bicycle wheel and forks. This article also examines the dating of the first version and construction of the authorised versions of Bicycle Wheel and presents new evidence for the source of the forks component of the 1916 version. <1> Bicycle Wheel is a three-dimensional artwork by French artist Marcel Duchamp (1887-1968). This well-known Readymade exists today in various artist-authorised versions. 1 I have been fortunate to find a Great War era photograph (fig. 1) showing the inverted front forks and wheel of a bicycle being used as a universal type mounting for a telescope, an item of military equipment, exactly as I imagined in my 2007 article. 2 Although this telescope stand does not employ a stool, it nonetheless offers considerable support for my original contention that Duchamp’s Bicycle Wheel was copied from an improvised telescope stand and was not the product of the artist’s imagination as he claimed. -

Special Bike Tools Catalogue
EN www.beta-tools.com Special Bike Tools Catalogue COP_CAT_BICI_ENG.indd 3 26/06/19 09:32 Beta has always been closely connected with the cycling world; our history winds along fabulous roads in one of the most cycling-oriented areas. Our company was first established in Erba, where the Colle del Ghisallo downhill road ends. The Madonna del Ghisallo is the Tour of Lombardy’s crucial climb. The Madonna del Ghisallo Sanctuary and the Cycling Museum the world’s best known and busiest destinations for cyclists. Cycling Museum Madonna del Ghisallo Sanctuary The Agostoni Cup, the most important race of Trittico Lombardo, has been held on the roads around our current headquarters in Sovico for over 70 years, the greatest champions having crossed the finishing line first. 2 PAGINE_INTRO_ENG.indd 2 26/06/19 09:12 Agostoni Cup Finish – Lissone We also have special consideration for the women’s world; we are a proud sponsor of the Giro Rosa, which honoured us by starting in our plant in Sovico in summer 2018. Giro Rosa Start - Sovico We partner UAE Team Emirates, which is led by the General Manager, Giuseppe Saronni, and competes at UCI World Tour level. Valerio Conti, Maglia Rosa A UAE mechanic at work 1 PAGINE_INTRO_ENG.indd 1 26/06/19 09:12 For over 80 years we have been Italy’s leader in the 80° design and production of professional working tools and instruments. We have over 600 staff, men and women employed in 3 factories in Italy and in the branches in Europe, Asia and South America. -

Registry of Motor Vehicles 540 Cmr 4.00
540 CMR: REGISTRY OF MOTOR VEHICLES 540 CMR 4.00: ANNUAL SAFETY AND COMBINED SAFETY AND EMISSIONS INSPECTION OF ALL MOTOR VEHICLES, TRAILERS, SEMI-TRAILERS AND CONVERTER DOLLIES Section 4.01: Scope and Applicability 4.02: Special Definitions 4.03: Requirements for Initial and Subsequent Annual Inspection 4.04: Procedures for Inspections of Non-commercial Motor Vehicles 4.05: Procedures for Inspection of Commercial Motor Vehicles 4.06: Procedures for Inspection of Motorcycles 4.07: Issuance of Certificates of Inspection, Rejection, and Waiver Procedure 4.08: Licensure of Inspection Stations 4.09: Licensure of Inspectors - License Application Procedures and Fees 4.01: Scope and Applicability 540 CMR 4.00 is adopted by the Registrar of Motor Vehicles pursuant to the authority of M.G.L. c. 90, § 31. 540 CMR 4.00 establishes Rules and Regulations for the Safety and Combined Safety and Emissions Inspections of all motor vehicles registered in the Commonwealth of Massachusetts under the authority of M.G.L. c. 90, § 7A. 540 CMR 4.00 also establishes regulations for the issuance of various inspection certificates pursuant to M.G.L. c. 90, § 7V(a), (b) and (c), and Regulations for the licensing of stations and inspectors pursuant to M.G.L. c. 90, § 7W. The failure of a motor vehicle to meet the requirements of the Safety and Combined Safety and Emissions Inspections will result in the suspension of the vehicle's certificate of registration pursuant of M.G.L. c. 90, § 20. 4.02: Special Definitions In addition to the definitions set forth in M.G.L. -

Newton Inst032115
NewtonTM Power Cycling Computer Operating Instructions FW 5.00 and higher March 2015 PROTECTED BY ONE OR MORE OF THE FOLLOWING US PATENTS 7,387,029; 7,377,180; D528,451 These instructions are divided into four parts and an Index: • PART ONE provides FAST START instructions for all users— quick setup and Newton calibration • PART TWO describes basic features of interest to all Newton users • PART THREE describes advanced features • PART FOUR includes Troubleshooting, FAQ and Appendices • INDEX has a complete list of topics: page 54-55 THESE INSTRUCTIONS REQUIRE THE USE OF FIRMWARE 5.0 OR HIGHER. THEY DO NOT APPLY TO NEWTONS WITH OLDER VERSIONS OF FIRMWARE (VERSIONS 1.X – 4.X) To learn how to install your Newton mount and sensors, please refer to printed instructions included separately inside your Newton’s box. Other resources: Enjoy the large forum community of Newton owners www.ibikeforum.com OR, please email us at [email protected] Also, check out our FaceBook page: https://www.facebook.com/iBikePowerMeters Make sure to visit our website frequently to get the latest in Newton product, software, and information updates: www.ibikesports.com 2 Copyright Velocomp LLP 2005-2015 TOPIC PAGES PART ONE—FAST START SETUP Battery charging, attaching Newton Mount, 4-5 ANT+ sensor setup/pairing, good/better/best calibration PART TWO—BASIC OPERATION • USING ISAAC and Newton together for best results 6 • Setting Date and Time 6 • Get Firmware and Serial Number 6 • Using Newton buttons and features 7-10 • Dialing-in your Newton for better/best