A Tour Around Central Configurations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Habilitation Thesis
HABILITATION THESIS FLEXIBLE OCTAHEDRA IN THE PROJECTIVE EXTENSION OF THE EUCLIDEAN 3-SPACE AND THEIR APPLICATION Die vorliegende Habilitationsschrift wurde ausgeführt zum Zweck der Erlangung der Lehrbefugnis für das Fach GEOMETRIE eingereicht an der Technischen Universität Wien Fakultät für Mathematik und Geoinformation von Mag.rer.nat. Dr.techn. Georg NAWRATIL 7. Jänner 2011 Danksagung Mein Dank geb¨uhrt O.Univ.Prof. Dr. Hellmuth Stachel, der w¨ahrend meiner bisherigen wis- senschaftlichen T¨atigkeit stets Zeit f¨ur die Beantwortung von Fragen und die Diskussion von Problemen fand. Seine dabei vermittelte geometrische und kinematische Sicht der Dinge, haben meine Denkweise nachhaltig gepr¨agt. Weiters gesch¨atzt habe ich seinen mir stets anvertrauten Gestaltungsfreiraum in Bezug auf Forschung sowie Lehre. Bei dieser Gelegenheit m¨ochte ich mich auch bei all jenen Kollegen der Abteilung f¨ur Differential- geometrie und Geometrische Strukturen sowie jenen der Abteilung f¨ur Geometrische Model- lierung und Industrielle Geometrie des Instituts f¨ur Diskrete Mathematik und Geometrie der TU Wien bedanken, die maßgeblich zur Schaffung einer angenehmen Arbeitsatmosph¨are beigetragen haben. Der gr¨oßte Dank richtet sich jedoch an meine Eltern sowie an meine Freundin Petra, die mich w¨ahrend der Entstehungszeit dieser Habilitationsschrift in allen Belangen tatkr¨aftig unterst¨utzt haben. I Contents 1 Introduction 1 1.1 Application and future research . ....... 3 1.2 References...................................... 4 2 Composition of spherical four-bar-mechanisms (with H. Stachel) 5 2.1 Introduction.................................... 5 2.2 Transmission by a spherical four-bar linkage . ........... 6 2.3 Composition of two spherical four-bar linkages . ........... 9 2.4 Conclusions..................................... 12 2.5 References..................................... -
Flexible Octahedra in the Projective Extension of the Euclidean 3-Space
Journal for Geometry and Graphics Volume 14 (2010), No. 2, 147–169. Flexible Octahedra in the Projective Extension of the Euclidean 3-Space Georg Nawratil Institute of Discrete Mathematics and Geometry, Vienna University of Technology Wiedner Hauptstrasse 8-10/104, Vienna, A-1040, Austria email: [email protected] Abstract. In this paper we complete the classification of flexible octahedra in the projective extension of the Euclidean 3-space. If all vertices are Euclidean points then we get the well known Bricard octahedra. All flexible octahedra with one vertex on the plane at infinity were already determined by the author in the context of self-motions of TSSM manipulators with two parallel rotary axes. Therefore we are only interested in those cases where at least two vertices are ideal points. Our approach is based on Kokotsakis meshes and reducible compositions of two four-bar linkages. Key Words: Flexible octahedra, Kokotsakis meshes, Bricard octahedra MSC 2010: 53A17, 52B10 1. Introduction A polyhedron is said to be flexible if its spatial shape can be changed continuously due to changes of its dihedral angles only, i.e., every face remains congruent to itself during the flex. 1.1. Review In 1897 R. Bricard [5] proved that there are three types of flexible octahedra1 in the Euclidean 3-space E3. These so-called Bricard octahedra are as follows: Type 1: All three pairs of opposite vertices are symmetric with respect to a common line. Type 2: Two pairs of opposite vertices are symmetric with respect to a common plane which passes through the remaining two vertices. -

SZAKDOLGOZAT Probabilistic Formulation of the Hadwiger
SZAKDOLGOZAT Probabilistic formulation of the Hadwiger–Nelson problem Péter Ágoston MSc in Mathematics Supervisor: Dömötör Pálvölgyi assistant professor ELTE TTK Institute of Mathematics Department of Computer Science ELTE 2019 Contents Introduction 3 1 Unit distance graphs 5 1.1 Introduction . .5 1.2 Upper bound on the number of edges . .6 2 (1; d)-graphs 22 3 The chromatic number of the plane 27 3.1 Introduction . 27 3.2 Upper bound . 27 3.3 Lower bound . 28 4 The probabilistic formulation of the Hadwiger–Nelson problem 29 4.1 Introduction . 29 4.2 Upper bounds . 30 4.3 Lower bounds . 32 5 Related problems 39 5.1 Spheres . 39 5.2 Other dimensions . 41 Bibliography 43 2 Introduction In 1950, Edward Nelson posed the question of determining the chromatic number of the graph on the plane formed by its points as vertices and having edges between the pairs of points with distance 1, which is now simply known as the chromatic number of the plane. It soon became obvious that at least 4 colours are needed, which can be easily seen thanks to a graph with 7 vertices, the so called Moser spindle, found by William and Leo Moser. There is also a relatively simple colouring by John R. Isbell, which shows that the chromatic number is at most 7. And despite the simplicity of the bounds, these remained the strongest ones until 2018, when biologist Aubrey de Grey found a subgraph which was not colourable with 4 colours. This meant that the chromatic number of the plane is at least 5. -
Kinematic Synthesis of Linkages
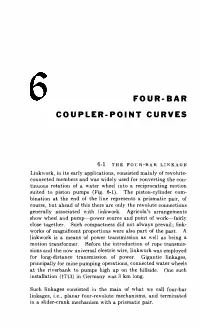
FOUR-BAR COUPLER-POINT CURVES 6-1 THE FOUR-BAR LINKAGE Link,vork, in its early applications, consisted mainly of revolute connected members and ,vas widely used for converting the con tinuous rotation of a ,vater wheel into a reciprocating motion suited to piston pumps (Fig. 6-1). The piston-cylinder com bination at the end of the line represents a prismatic pair, of course, but ahead of this there are only the revolute connections generally associated ,Yith linkwork. Agricola's arrangements show wheel and pump--power source and point of work-fairly close together. Such compactness did not al,vays prevail; link works of magnificent proportions were also part of the past. A linkwork is a means of power transmission as ,vell as being a motion transformer. Before the introduction of rope transmis sions and the now universal electric wire, linkwork ,vas employed for long-distance transmission of power. Gigantic linkages, principally for mine pumping operations, connected water wheels at the riverbank to pumps high up on the hillside. One such installation (1713) in Germany ,vas 3 km long. Such linkages consisted in the main of ,vhat ,ve call four-bar linkages, i.e., planar four-revolute mechanisms, and terminated in a slider-crank mechanism with a prismatic pair. ,roe ... ,._, Linl.....i.b<t •..,.,...... .i-1-.1,.,.,.P", """""'h • ""ntw,,. [F,- .... ....i. •··o.,,...,,_,,....,•"H_,,,....i.,;.,.(1912).] 150 KINEMATIC SYNTHESIS OF LINKAGES With Watt's invention of the "straight-line motion" (I 784) the four-bar linkage was used a new· \\·ay, for the significantmotion output was not that of the followerin but that of the coupler: Watt had found a coupler point describing a curve of special usefulness. -

Nguyen Duc Thang
Nguyen Duc Thang 2700 ANIMATED MECHANICAL MECHANISMS With Images, Brief explanations and YouTube links Part 3 Mechanisms of specific purposes Renewed on 31 October 2017 1 This document is divided into 4 parts. Part 1: Transmission of continuous rotation Part 2: Other kinds of motion transmission Part 3: Mechanisms of specific purposes Part 4: Mechanisms for various industries Autodesk Inventor is used to create all videos in this document. They are available on YouTube channel “thang010146”. To bring as many as possible existing mechanical mechanisms into this document is author’s desire. However it is obstructed by author’s ability and Inventor’s capacity. Therefore from this document may be absent such mechanisms that are of complicated structure or include flexible and fluid links. This document is periodically renewed because the video building is continuous as long as possible. The renewed time is shown on the first page. This document may be helpful for people, who - have to deal with mechanical mechanisms everyday - see mechanical mechanisms as a hobby Any criticism or suggestion is highly appreciated with the author’s hope to make this document more useful. Author’s information: Name: Nguyen Duc Thang Birth year: 1946 Birth place: Hue city, Vietnam Residence place: Hanoi, Vietnam Education: - Mechanical engineer, 1969, Hanoi University of Technology, Vietnam - Doctor of Engineering, 1984, Kosice University of Technology, Slovakia Job history: - Designer of small mechanical engineering enterprises in Hanoi. - Retirement in 2002. Contact Email: [email protected] 2 Table of Contents 11. Brakes .......................................................................................................................... 4 12. Safety clutches ............................................................................................................ 9 13. Mechanisms for indexing, positioning and interlocking ....................................... -

References to Additional Literature
References to Additional Literature 1. Angeles J (1982) Spatial kinematic chains, analysis, synthesis, optimisation. Springer, New York 2. Angeles J (1988) Rational kinematics. Springer Tracts in Natural Philosophy 34, New York 3. Angeles J, Hommel G, Kov´acs P (1993) Computational kinematics. Kluwer, Dordrecht 4. Angeles J (2003) Fundamentals of robotic mechanical systems: Theory, methods and algorithms. 2nd ed. Springer, New York 5. Artobolevski I I (1986) Mechanisms in modern engineering design. v.1–3, Mir, Moscow 6. Beggs J S (1966) Advanced mechanism. Macmillan, New York 7. Beggs J S (1983) Kinematics. Springer, Berlin, Heidelberg, New York 8. Beyer R (1931) Technische Kinematik. Barth, Leipzig 9. Beyer R (1953) Kinematische Getriebesynthese. Springer, Berlin (Engl. trans. Kuenzel H (1963) The kinematic synthesis of linkages. Chapman and Hall, London) 10. Beyer R (1963) Technische Raumkinematik. Springer, Berlin 11. Bogolyubov A N (1967) Razvitie problem mekhaniki mashin (Bibliografiya) [Develop- ment of problems of mechanics in machines (Bibliography)], Naukova Dumka, Kiev 12. Crelier L (1911) Syst`emes cin´ematiques. Gauthier-Villars, Paris 13. de Groot J (Ed.) (1970) Bibliography on kinematics. v.1,2. Eindhoven Univ. of Techn. 14. Dizio˘glu B (1965,1967) Getriebelehre v.1: Grundlagen, v.2: Massbestimmung. Vieweg, Braunschweig 15. Dresig H, Naake S, Rockhausen L (1994) Vollst¨andiger und harmonischer Ausgleich ebener Mechanismen. Fortschritt-Berichte VDI, Reihe 18, 155,71 pp. D¨usseldorf 16. Dresig H, Sch¨onherr J, Peisach E E (2000) Typ- und Masssynthese von ebenen Kop- pelgetrieben mit h¨oheren Gliedergruppen. Abschlussbericht DFG-Forschungsvorhaben Dr234/7-2, Bonn 17. Giering O, Hoschek J (eds.) (1994) Geometrie und ihre Anwendungen. -
![Combinatorics of Bricard's Octahedra Arxiv:2004.01236V1 [Math.MG] 2](https://docslib.b-cdn.net/cover/9617/combinatorics-of-bricards-octahedra-arxiv-2004-01236v1-math-mg-2-7759617.webp)
Combinatorics of Bricard's Octahedra Arxiv:2004.01236V1 [Math.MG] 2
Combinatorics of Bricard’s octahedra Matteo Gallet∗, Georg Grasegger∗,. Jan Legerský◦ Josef Schicho∗,◦ We re-prove the classification of flexible octahedra, obtained by Bricard at the beginning of the XX century, by means of combinatorial objects satisfying some elementary rules. The explanations of these rules rely on the use of a well-known creation of modern algebraic geometry, the moduli space of stable rational curves with marked points, for the description of configurations of graphs on the sphere. Once one accepts the objects and the rules, the classification becomes elementary (though not trivial) and can be enjoyed without the need of a very deep background on the topic. 1 Introduction Cauchy proved [Cau13] that every convex polyhedron is rigid, in the sense that it cannot move keeping the shape of its faces. Hence flexible polyhedra must be concave, and indeed Bricard discovered [Bri97, Bri26, Bri27] three families of concave flexible octahedra. Lebesgue lectured about Bricard’s construction in 1938/39 [Leb67], and Bennett discussed flexible octahedra in his work [Ben12]. In recent years, there has been renewed interest in the topic; see the works of Baker [Bak80, Bak95, Bak09], Stachel [Sta87, Sta14, Sta15], Nawratil [Naw10, NR18], and others [Con78, BS90, Mik02, Ale10, AC11, Nel10, Nel12, CY12]. The goal of this paper is to re-prove Bricard’s result by employing modern techniques in algebraic geometry that hopefully may be applied to more general situations. The three families of flexible octahedra are the following (see Figures1 and2): ∗ Supported by the Austrian Science Fund (FWF): W1214-N15, project DK9. arXiv:2004.01236v1 [math.MG] 2 Apr 2020 ◦ Supported by the Austrian Science Fund (FWF): P31061. -

Global Coherence by Interrelating Disparate Strategic Patterns Dynamically Topological Interweaving of 4-Fold, 8-Fold, 12-Fold, 16-Fold and 20-Fold in 3D -- /
Alternative view of segmented documents via Kairos 19 August 2019 | Draft Global Coherence by Interrelating Disparate Strategic Patterns Dynamically Topological interweaving of 4-fold, 8-fold, 12-fold, 16-fold and 20-fold in 3D -- / -- Introduction Current relevance of the "simplest torus"? Clarifying subtle complexity and a necessary "cognitive twist" Coherent mapping possibilities on the simplest torus? Cognitive dilemma: mapping "inside-out" versus "outside-in" Questionable confusion in configuring strategic frameworks: "fudging" self-reflexivity? Cognitive constraints in comprehending strategic coherence Mapping as superimposition, superposition or superstition? Framing an operating context of 16 "dimensions" Functional dynamics of a 16-fold configuration of strategic goals Modifying the form: unfolding, exploding, stellation morphing Modifying the cyclic symmetry of the star torus Imagining further implications: helical coil, toroidal knot or crown? Three-fold and two-fold patterns -- by contrast? Square of opposition and Crossed quadrilaterals: the cognitive challenge? Shifting between strategic patterns: transmission systems and gearing References Introduction The following presentation follows from discussion of the Coping Capacity of Governance as Dangerously Questionable: recognizing assumptions and unasked questions when facing crisis (2019), and specifically from the closing section (From disorderly "collapse" to orderly "renaissance", 2019). The focus there was on exploring mnemonic aids to comprehension of 16-fold patterns, as exemplified by the 16 binary truth functions, but characterized by a wide range of other uses of 16-fold patterns, whose potential relationships appear to merit attention with respect to governance (Deprecation of potential correspondences: 16-fold patterns? 2019). Any 16-fold pattern is a provocative challenge to comprehension, given the constraints on human capacity with respect to the complexity of any such pattern as a whole (Conceptual clustering and cognitive constraints, 2014). -

Radially Expandable Ring-Like Structure with Antiparallelogram Loops
Proceedings of the International Symposium of Mechanism and Machine Science, 2017 AzC IFToMM – Azerbaijan Technical University 11-14 September 2017, Baku, Azerbaijan Radially Expandable Ring-Like Structure with Antiparallelogram Loops Şebnem GÜR1, Koray KORKMAZ2*, Gökhan KİPER3 1, 2*Izmir Institute of Technology Department of Architecture E-mail: [email protected], [email protected] 3 Izmir Institute of Technology Department of Mechanical Engineering E-mail: [email protected] Abstract structures made of SLEs [9]. Later on the foldability As they constitute a substantial percent of deployable conditions of SLEs were defined by Felix Escrig [10, 11]. structures, scissor mechanisms are widely studied. This Kinematics of deployable structures continued to be a being so, new approaches to the design of scissor research area for many others [12-14]. mechanisms still emerge. Usually design methods Angulated elements were first introduced by consider the scissor elements as modules. Alternatively, it Hoberman [15, 16]. This new type of SLEs were able to is possible to consider the loops as modules. In this paper, subtend a constant angle. We observe the same property in loop assembly method is used such that antiparallelogram Servadio’s foldable polyhedra [17]. Hoberman’s latter loops are placed along a circle, to construct a deployable work, the Iris Dome [16], is nothing but a circular structure. The research shows that it is possible to application of the angulated unit subtending constant construct radially deployable structures with identical angle between the unit lines, therefore capable of radial antiparallelogram loops with this method. Then kinematic deployment. and geometrical properties of the construction are Angulated units were further explored by You and analyzed. -

Quadrilaterals
Quadrilaterals One pair of parallel sides Trapezium Two pairs Two pairs of equal of equal parallel adjacent sides sides Kite Parallelogram Four sides equal Four right angles Rhombus Rectangle Four right angles Four equal sides Square Legend Quadrilaterals A, B, C, D are angles a, b, c, d are side lengths B All sides in one plane Not all sides in one plane b Skew a C Planar c A D No crossed sides d Two crossed Note that all properties are sides Simple inherited along the arrows All angles < 180° Complex One angle > 180° Arrow Antiparallelogram (Self-intersecting) Concave (aka Dart/Chevron) Convex Two pairs of Two pairs of opposite equal adjacent equal sides sides Opposite angles sum to 180° Opposite side One pair Equal One pair lengths have Perpendicular of parallel diagonals of opposite equal sums diagonals sides equal sides Tangential Watt Cyclic Ex-tangential Orthodiagonal A + C = B + D = 180° (Inscriptible) a + c = b + d 2 2 2 2 Trapezium Equidiagonal a + c = b + d quadrilateral a + c = b + d A + B = C + D = 180° One pair of Opposite side lengths parallel ides Non-equal Two pairs of equal have equal sums opposite adjacent sides sides parallel Two One pair of Non-parallel Two pairs A second adjacent parallel sides Opposite of equal sides equal (if circle r=∞) pair of parallel right sides Opposite adjacent sides angles equal sum angles sides equal sum Right-angled Isosceles Kite Tangential Parallelogram Bicentric (‘Rhomboid’ if adjacent trapezium trapezium sides are unequal) trapezium Two Four sides Four Four sides Four right Four Four right One pair of opposite equal sides equal angles right angles opposite right equal angles equal sides angles Opposite side Third lengths have equal sums side equal Four right angles Right kite Rhombus Quadric Rectangle 3-sides-equal Isosceles (‘Oblong’ if adjacent trapezium tangential sides are unequal) Four right angles Four Four equal equal sides Four right angles sides Four equal sides Square Equilic 60° . -

Latex Template for an EUCOMES 2010 Paper
Synthesis of Scalable Planar Scissor Linkages with Anti-Parallelogram Loops Ş. Gür1, C. Karagöz2, G. Kiper3 and K. Korkmaz4 1İzmir Institute of Technology, Turkey, e-mail: [email protected] 2İzmir Institute of Technology, Turkey, e-mail: [email protected] 3İzmir Institute of Technology, Turkey, e-mail: [email protected] 4İzmir Institute of Technology, Turkey, e-mail: [email protected] Abstract. Scissor linkages are commonly used as mechanisms for scaling objects. They constitute a significant portion of deployable structures. Since 1960s many researchers sought to form novel structures using the scissor units. In 1990s Hoberman brought a new perspective to the field when he used the loops, not the units to form linkages. Starting from mid 2000s, other researchers joined into this new approach of design. One of the latest researches presented a design for scaling a circular forms with anti- parallelogram loops. This study shows that an anti-parallelogram loop assembly can also be used for scaling planar curves with variable curvature. Key words: scalable scissor linkage, anti-parallelogram loop, loop assembly method 1 Introduction Mechanisms that can transform between an open (deployed) and a closed (stowed) configuration are called deployable structures [8]. Scissor linkages are widely used for deployable structures. Scissor-like elements (SLEs) are ternary links with revolute joints. Two SLEs connected at the middle joint constitute a scissor unit. The first academic study on SLEs was conducted by Pinero in 1961 for his design of a deployable theater composed of pantographic elements [17]. Escrig defined the foldability conditions [2, 3]. The subject remains to be of interest today for many other researchers [13, 16, 22]. -

On a Special R on a Special Rectangular Problem
Acta Ciencia Indica, Vol. XL M, No. 2 (2014) Acta Ciencia Indica, Vol. XL M, No. 2, 133 (2014)133 ON A SPECIAL RECTANGULAR PROBLEM P. JAYAKUMAR, P. REKA Deptt. of Math, A.V.V.M Sri Pushpam College (Autonomous), Poondi, Thanjavur (Dist.) - 613 503 (T.N), India AND G. SHANKARAKALIDOSS Department of Mathematics, Kings College of Engineering, Punalkulam, Pudukkottai (Dist) (T.N), India RECEIVED : 24 June, 2013 REVISED : 15 January, 2014 In this paper we report on an infinite sequence of rectangles where in each of the addition of the area and perimeter are expressed as the difference of two squares. The recurrence relations satisfied by the solutions are presented. KEY WORDS: Infinite sequence of rectangles, the area, the perimeter and the recurrence relations. SUBJECT CLASSIFICATION: MSC: 11A, 11D INTRODUCTION In Euclidean plane geometry, a rectangle is any quadrilateral with four right angles. It can also be defined as an equiangular quadrilateral, since equiangular means that all of its angles are equal (360°/4 = 90°). It can also be defined as a parallelogram containing a right angle. A rectangle with four sides of equal length is a square. The term oblong is occasionally used to refer to a non-square rectangle. A rectangle with vertices ABCD would be denoted as ABCD. The word rectangle comes from the Latin rectangulus, which is a combination of rectus (right) and angulus (angle). A so-called crossed rectangle is a crossed (self-intersecting) quadrilateral which consists of two opposite sides of a rectangle along with the two diagonals It is a special case of an antiparallelogram, and its angles are not right angles.