Data Structures for Weighted Matching and Extensions to $ B $-Matching
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Math 400 Paper 2 Matthew Dreher Graph Theory Matching: Start with We Need to Talk About What Is Graph Theory and the Part of It
Math 400 paper 2 Matthew dreher Graph theory matching: Start with we need to talk about what is graph theory and the part of it that are conserved with matchings. Graph theory is the study of graphs, which are mathematical structures that are made up of points called vertices or node which can be connected by edges or lines trams chose of term is normal determined by if graph is undirected or not for my purposes I will only talk about undirected mean I will only use the terms vertex and edges. A vertex is adjacent if there exist a shared edge between the vertices, There is a couple of types graph of interests a one being the a connected graph which means that between any two vertices there exists a walk a sequence of adjacent vertices from vertex (A) to vertex (B) or path which is a walk with no repeated vertices in the walk, if there exist a walk then there exist a path the reverse is also true. Regular and complete and cycles, a graph is regular if each vertex’s has the same number of degree (same number of edges) denoted by i-regular where i is the degree of each vertices, cycles graph is a special type 2-regular where it connected and therefore has a path from vertex (A) to (A), and complete graph which is a regular graph with is (n-1)-regular where n is the number vertices in the graph commonly denoted by ki where I is the number of vertices in the graph this is also the maxim number of edges for a simple graph. -

Eindhoven University of Technology BACHELOR the Chinese Postman Problem in Undirected and Directed Graphs Verberk, Lucy P.A
Eindhoven University of Technology BACHELOR The Chinese postman problem in undirected and directed graphs Verberk, Lucy P.A. Award date: 2019 Link to publication Disclaimer This document contains a student thesis (bachelor's or master's), as authored by a student at Eindhoven University of Technology. Student theses are made available in the TU/e repository upon obtaining the required degree. The grade received is not published on the document as presented in the repository. The required complexity or quality of research of student theses may vary by program, and the required minimum study period may vary in duration. General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain Eindhoven University of Technology Applied Mathematics Combinitorial Optimization The Chinese Postman Problem in undirected and directed graphs Bachelor Final project Author: Supervisor: Lucy Verberk Dr. Judith Keijsper July 11, 2019 Abstract In this report the Chinese Postman Problem (CPP) for undirected, directed and mixed graphs will be considered. Solution methods for the undirected and directed CPP will be discussed. For the mixed CPP, some suggestions for further research are mentioned. An application of routing gritters and snow-shovel trucks in the city of Eindhoven in the Netherlands will be con- sidered. -

Dynamic Matching Algorithms in Practice
Dynamic Matching Algorithms in Practice Monika Henzinger University of Vienna, Faculty of Computer Science, Austria [email protected] Shahbaz Khan Department of Computer Science, University of Helsinki, Finland shahbaz.khan@helsinki.fi Richard Paul University of Vienna, Faculty of Computer Science, Austria [email protected] Christian Schulz University of Vienna, Faculty of Computer Science, Austria [email protected] Abstract In recent years, significant advances have been made in the design and analysis of fully dynamic maximal matching algorithms. However, these theoretical results have received very little attention from the practical perspective. Few of the algorithms are implemented and tested on real datasets, and their practical potential is far from understood. In this paper, we attempt to bridge the gap between theory and practice that is currently observed for the fully dynamic maximal matching problem. We engineer several algorithms and empirically study those algorithms on an extensive set of dynamic instances. 2012 ACM Subject Classification Mathematics of computing → Graph algorithms Keywords and phrases Matching, Dynamic Matching, Blossom Algorithm Digital Object Identifier 10.4230/LIPIcs.ESA.2020.58 Supplementary Material Source code and instances are available at https://github.com/ schulzchristian/DynMatch. Funding The research leading to these results has received funding from the European Research Council under the European Community’s Seventh Framework Programme (FP7/2007-2013) /ERC grant agreement No. 340506. 1 Introduction The matching problem is one of the most prominently studied combinatorial graph problems having a variety of practical applications. A matching M of a graph G = (V, E) is a subset of edges such that no two elements of M have a common end point. -

Lecture 3: July 31 3.1 Gallai Edmonds Decomposition
CSL851: Algorithmic Graph Theory Fall 2013 Lecture 3: July 31 Lecturer: Naveen Garg Scribes: Khaleeque Ansari* Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have not been subjected to the usual scrutiny reserved for formal publications. They may be distributed outside this class only with the permission of the Instructor. (*Based on notes by Douglas B. West) Last Lecture: • Finding a matching in a General Graph ( Blossom Algorithm) • Tuttes Theorem: A graph G = (V; E) has a perfect matching if and only if for every subset U of V , the subgraph induced by V − U has at most jUj connected components with an odd number of vertices. 3.1 Gallai Edmonds Decomposition In a graph G, let B be the set of vertices covered by every maximum matching in G, and let D = V (G) − B. Further partition B by letting A be the subset consisting of vertices with at least one neighbor outside B, and let C = B −A. The Gallai-Edmonds Decomposition of G is the partition of V (G) into the three sets A; C; D. 3-1 3-2 Lecture 3: July 31 Figure 3.1: The Gallai-Edmonds Decomposition of G Theorem 3.1 (Gallai-Edmonds Structure Theorem) Let A,C,D be the sets in the Gallai Edmonds Decom- position of a graph G. Let G1,...,Gk be the components of G[D]. If M is a maximum matching in G, then the following properties hold. a) Every vertex in C is matched. b) Every vertex in A is matched to distinct components in G[D]. -

Clique Generalizations and Related Problems by Cynthia Ivette Wood
RICE UNIVERSITY Clique Generalizations and Related Problems by Cynthia Ivette Wood A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE Doctor of Philosophy APPROVED, THESIS COMMITTEE: Illya V. · s, Chair Professo · of Computational and Applied Mathematics Swarat Chaudhuri Associate Professor of Computer Science Andrew J. Schaefer Noah Harding Chair Professor of Computational and Applied Mathematics Yin Zhang Professor of Computational and Applied Mathematics Houston, Texas November, 2015 ABSTRACT Clique Generalizations and Related Problems by Cynthia Ivette Wood A large number of real-world problems can be model as optimization problems in graphs. The clique model was introduced to aid the study of network structure for social interaction. Each vertex represented an actor and the edges represented the relations between them. Nevertheless, the model has been shown to be restrictive for modeling real-world problems, since it leaves out subgraphs that do not have all pos- sible edges. As a consequence, clique generalizations were introduced to overcome the disadvantages of the clique model. In this thesis, I present three computationally dif- ficult combinatorial optimization problems related to clique generalization problems: co-2-plexes and k-cores. A k-core is a subgraph with minimum degree greater than or equal to k. In this work, I discuss the minimal k-core problem and the minimum k-core problem. I present a backtracking algorithm to find all minimal k-cores of a given undirected graph and its applications to the study of associative memory. The proposed method is a modification of the Bron and Kerbosch algorithm for finding all cliques of an undirected graph. -
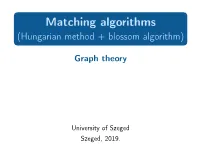
Matching Algorithms (Hungarian Method + Blossom Algorithm)
Matching algorithms (Hungarian method + blossom algorithm) Graph theory University of Szeged Szeged, 2019. Lec. 5 Hungarian method 1/11 O r1 r2 r3 r4 r5 r6 r7 r8 HUNGARIAN METHOD INPUT: A bipartite graph G (with color classes A and B) and a matching M in G which does not cover A. OUTPUT: An augmenting path for M, or „M is of maximum size”. Lec. 5 Hungarian method 1/11 O r1 r2 r3 r4 r5 r6 r7 r8 Sketch of the algorithm: Starting from the unmatched points of A (as roots), build a forest from the alternating paths of G. The forest is constructed by a „greedy method”, which will be discussed on the next slide. We define two sets of vertices, the sets of inner and outer vertices, I and O. Initially, O := fr1; : : : ; r8g and I := ;. Lec. 5 Details of the Hungarian method (Greedy expansion step) 2/11 I O r1 r2 r3 r4 r5 r6 r7 r8 Greedy expansion step: If some outer vertex u is adjacent to some matched vertex v outside the forest, then add v to the forest, together with its pair v0 in M (and edges uv and vv0). v is designated as inner vertex, v0 is designated as outer vertex. Lec. 5 Details of the Hungarian method (Greedy expansion step) 2/11 I O r1 r2 r3 r4 r5 r6 r7 r8 Greedy expansion step: If some outer vertex u is adjacent to some matched vertex v outside the forest, then add v to the forest, together with its pair v0 in M (and edges uv and vv0). -

A Combinatoric Interpretation of Dual Variables for Weighted Matching Problems
A Combinatoric Interpretation of Dual Variables for Weighted Matching Problems Harold N. Gabow ∗ March 2, 2012 Abstract We consider four weighted matching-type problems: the bipartite graph and general graph versions of matching and f-factors. The linear program duals for these problems are shown to be weights of certain subgraphs. Specifically the so-called y duals are the weights of certain maximum matchings or f-factors; z duals (used for general graphs) are the weights of certain 2-factors or 2f-factors. The y duals are canonical in a well-defined sense; z duals are canonical for matching and more generally for b-matchings (a special case of f-factors) but for f-factors their support can vary. As weights of combinatorial objects the duals are integral for given integral edge weights, and so they give new proofs that the linear programs for these problems are TDI. 1 Introduction The weighted versions of combinatorial problems, e.g., weighted bipartite matching, minimum cost network flow, are usually studied by introducing linear programming duals to ideas developed in the cardinality version of the problem (e.g., augmenting paths for many problems [7]; blossoms in [5] and [4] for matching, etc.), This paper takes a closer look at the combinatorics of the weighted problems without reference to the unweighted cardinality version. We present combinatoric interpretations of the linear programming duals, that are in some sense canonical. These duals give simple proofs of classic minimax theorems for cardinality problems. The results are easily summarized. We study weighted versions of bipartite and general graph matching, and bipartite and general graph f-factors and b-matchings. -

Planar Maximum Matching: Towards a Parallel Algorithm
Planar Maximum Matching: Towards a Parallel Algorithm Samir Datta1 Chennai Mathematical Institute & UMI ReLaX, Chennai, India [email protected] Raghav Kulkarni Chennai Mathematical Institute, Chennai, India [email protected] Ashish Kumar Chennai Mathematical Institute, Chennai, India [email protected] Anish Mukherjee2 Chennai Mathematical Institute, Chennai, India [email protected] Abstract Perfect matchings in planar graphs have been extensively studied and understood in the context of parallel complexity [21, 36, 25, 6, 2]. However, corresponding results for maximum matchings have been elusive. We partly bridge this gap by proving: 1. An SPL upper bound for planar bipartite maximum matching search. 2. Planar maximum matching search reduces to planar maximum matching decision. 3. Planar maximum matching count reduces to planar bipartite maximum matching count and planar maximum matching decision. The first bound improves on the known [18] bound of LC=L and is adaptable to any special bipartite graph class with non-zero circulation such as bounded genus graphs, K3,3-free graphs and K5-free graphs. Our bounds and reductions non-trivially combine techniques like the Gallai- Edmonds decomposition [23], deterministic isolation [6, 7, 3], and the recent breakthroughs in the parallel search for planar perfect matchings [2, 32]. 2012 ACM Subject Classification Theory of computation → Parallel algorithms Keywords and phrases maximum matching, planar graphs, parallel complexity, reductions Digital Object Identifier 10.4230/LIPIcs.ISAAC.2018.21 1 Introduction Matchings are one of the most fundamental and well-studied objects in graph theory and in theoretical computer science (see e.g. [23, 20]) and have played a central role in Algorithms and Complexity Theory. -

A Novel Application of the Gallai-Edmonds Structure Theorem
Throughput Characterization of Node-based Scheduling in Multihop Wireless Networks: A Novel Application of the Gallai-Edmonds Structure Theorem Bo Ji and Yu Sang Dept. of Computer and Information Sciences Temple University Philadelphia, PA 19122 {boji, yu.sang}@temple.edu ABSTRACT Keywords Maximum Vertex-weighted Matching (MVM) is an impor- Throughput; Node-based Scheduling; MVM; Wireless Net- tant link scheduling algorithm for multihop wireless net- works; Gallai-Edmonds Structure Theorem works. Under certain assumptions, it has been shown that if the underlying network graph is bipartite, MVM not only 1. INTRODUCTION maximizes the throughput in settings with continuous packet arrivals, but also minimizes the evacuation time (i.e., time Link scheduling is one of the most critical functionalities to drain all the initial packets) in settings without future in multihop wireless networks. The design of efficient wire- packet arrivals. Further, even if the network graph is arbi- less scheduling algorithms is very challenging and has been trary, MVM achieves the best known performance guarantee extensively studied in the literature (e.g., see [7,18] and ref- for the evacuation time among existing online link schedul- erences therein). Among several metrics that are commonly ing algorithms. Also, it empirically exhibits close-to-optimal used for evaluating the scheduling performance, the through- throughput performance and good delay performance. How- put and the evacuation time are two of the most important ever, in an arbitrary network graph the throughput perfor- ones [8,9,11,12]. In settings with continuous packet arrivals, mance of MVM has not been well understood. To that end, the throughput is measured by the set of traffic loads un- in this paper we aim to carry out a systematic study of the der which the network can be stabilized, while in settings throughput performance of MVM, assuming single-hop flows without future arrivals, the evacuation time is defined as the and the node-exclusive interference model. -

Exam Discrete Optimization (WI4227)
Exam Discrete Optimization (WI4227) 21 january 2014, 14.00 { 17.00 (3 hours). This exam consists of 5 problems worth 90 pts in total. Please write your name on every sheet (including this one). During the exam, books, written notes, graphical calculators and mobile phones are not allowed. Good luck! Name: Student number: [18pts] 1. The following questions are worth 2pts each. In each question check the box(es) of the correct answer(s). (a) Which of the following statements are true? For any matrix A, the collection of linearly independent sets of columns form the independent sets of a matroid. For any bipartite graph G, the collection of stable sets form the independent sets of a matroid. For any graph G, the collection fI ⊆ V j there is a matching M in G that covers all nodes in Ig is the collection of independent sets of a matroid. (b) Which of the following statements are true? 0 0 0 If B and B are bases of a matroid M, then for every x 2 B n B and every y 2 B n B the set (B [ fyg) n fxg is a basis of M. If r is the rank function of a matroid, then r(A) + r(B) ≥ r(A [ B) + r(A \ B) holds for all subsets A and B of the ground set. If r is the rank function of a matroid on the ground set S, then the set P = fx 2 RS j x ≥ 0; x(U) ≤ r(U) for every U ⊆ Sg is an integral polytope. -

Excluded T-Factors in Bipartite Graphs: Unified Framework for Nonbipartite
2-matching problem in bipartite graphs, and the arborescence problem in directed graphs. A key ingredient of the proposed algorithm is a technique to shrink the excluded t-factors. This technique commonly extends the techniques used to shrink odd cycles, triangles, squares, and directed cycles in a matching algorithm [10], a triangle-free 2-matching algorithm [6], a square-free 2-matching algorithms in bipartite graphs [15, 33], and an arborescence algorithm [5, 11]. respectively. We demonstrate that the proposed framework is tractable in the class where this shrinking technique works. 1.1 Previous Work The problems most relevant to our work are the even factor, triangle-free 2-matching, and square-free 2-matching problems. 1.1.1 Even factor The even factor problem [8] is a generalization of the nonbipartite matching problem, which admits a further generalization: the basic/independent even factor problem [8, 20] is a common generalization with matroid intersection. The origin of the even factor problem is the independent path-matching problem [7], which is a common generalization of the nonbipartite matching and matroid intersection problems. In [7], a min-max theorem, totally dual integral polyhedral description, and polynomial solvability by the ellipsoid method were presented. These were followed by further analysis of the min-max relation [13] and Edmonds-Gallai decomposition [36]. A combinatorial approach to the path-matchings was proposed in [37] and completed by Pap [33], who addressed a further generalization, the even factor problem [8]. Here, let D = ¹V; Aº be a digraph. A subset of arcs F ⊆ A is called a path-cycle factor if it is a vertex-disjoint collection of directed cycles (dicycles) and directed paths (dipaths). -

More Aspects of Arbitrarily Partitionable Graphs Julien Bensmail, Binlong Li
More Aspects of Arbitrarily Partitionable Graphs Julien Bensmail, Binlong Li To cite this version: Julien Bensmail, Binlong Li. More Aspects of Arbitrarily Partitionable Graphs. Discussiones Mathe- maticae Graph Theory, University of Zielona Góra, inPress, 10.7151/dmgt.2343. hal-01915633v2 HAL Id: hal-01915633 https://hal.archives-ouvertes.fr/hal-01915633v2 Submitted on 8 Jun 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. I 1 More Aspects of Arbitrarily Partitionable Graphs a b 2 Julien Bensmail , Binlong Li a 3 Université Côte d’Azur, CNRS, Inria, I3S, 4 F-06902 Sophia-Antipolis, France 5 b 6 Department of Applied Mathematics, 7 Northwestern Polytechnical University, 8 Xi’an, Shaanxi 710072, P.R. China 9 Abstract 10 A graph G of order n is arbitrarily partitionable (AP) if, for every sequence (n1; : : : ; np) 11 partitioning n, there is a partition (V1;:::;Vp) of V (G) such that G[Vi] is a connected 12 graph of order ni for i = 1; : : : ; p. The property of being AP is related to other well-known 13 graph notions, such as perfect matchings and Hamiltonian cycles, with which it shares 14 several properties.