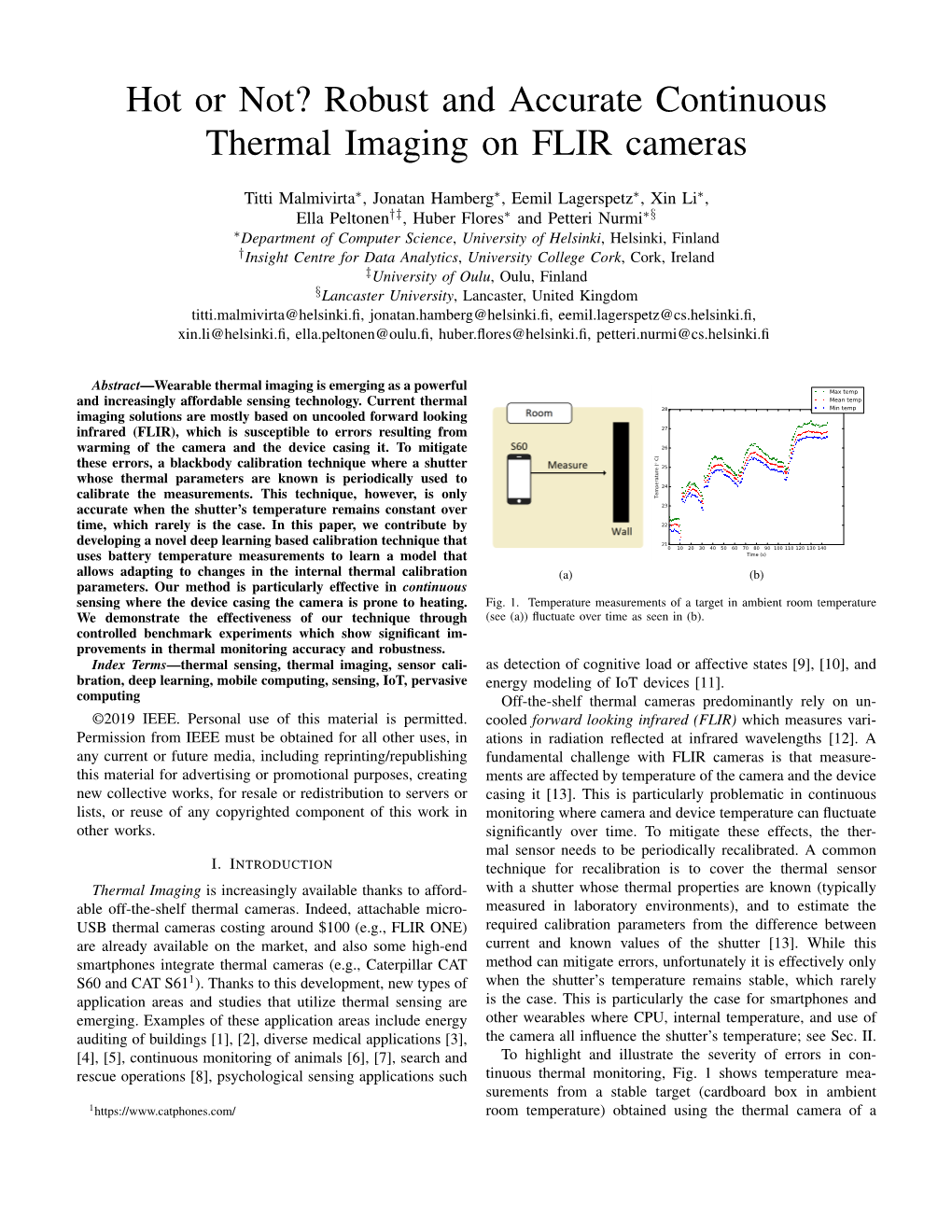
Robust and Accurate Continuous Thermal Imaging on FLIR Cameras
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cat S61® Specifications
GET BACK TO WORK WITH THE CAT® S60/S61 INITIAL EVALUATION DEVICE ABOUT US ABOUT US Bullitt has 10 years of experience designing and building distinctive, innovative, and fit for purpose products, targeted at consumers’ unmet needs in the underserved market segments We bring these products to market under major global brands that are relevant to the market segment and our target customers CAT S61® SPECIFICATIONS The built in FLIR camera allows the device to take a thermal reading ANDROID OS: Android 8.0 Oreo (with upgrade to P) BATTERY: 4500mAh capacity battery, QC4.0 compatible, QC3.0, USB type C MEMORY: 4GB RAM, 64GB ROM (expandable with microSD, up to 2TB PROCESSOR: 2.2GHz CPU, Octa-core Qualcomm Snapdragon 630 DROP TEST: Drop tested onto concrete from 1.8m (6 feet) The standard S61 camera WATERPROOF: IP68 water and dustproof, up to 3m deep (10 feet) for 60 minutes MIL-SPEC 810G: Shock/drop proof , temp -30°C (-22°F) to 65°C (149°F) for up to 24 hours CAMERA: 16MP rear camera, 8MP front camera, 4K video SCREEN: 5.2” 1080p HD display, optimized for outdoor use, Corning Gorilla Glass 5 CONNECTIVITY: LTE Cat 13, VoLTE, VoWiFi Wi-Fi: Dual band WiFi (2.4GHz/5GHz) b/g/n/ac NFC/BLUETOOTH: YES / BT5.0 4G LTE BANDS: 1,2,3,4,5,7,8,12,13,17,25,26,28,29,66 3G BANDS: UMTS 950 (Band 5),900 (Band 8),1700/2100 (B4),1900 (B2), 2100 (B1) 2G BANDS: GSM 850 (Band 5), 900 (Band 8), 1800 (Band 3), 1900 (Band 2) SENSORS: Thermal Camera 80 x 60 FLIR Lepton 2.5 , Indoor Air Quality Meter, E-Compass, * MANUFACTURER 2 YEAR WARRANTY INCLUDED Proximity, Ambient Light, Accelerometer, Gyroscope, Location, Barometer PROPRIETARY & CONFIDENTIAL. -
2019 – Ausgabe 1
ZKZ 67583 . ISSN 0939-87910939-879 DEUTSCHES BAUBLATT NR. 384 JANUAR | FEBRUAR 2016 BAUBLATT Januar | Februar 2019 46. Jahrgang Nr. 402 MENSCHEN, MÄRKTE, MASCHINEN, METHODEN, MATERIAL Anzeige DAS BESTE DER BAUMA BEI ZEPPELIN SCHON HEUTE Besuchen Sie uns in Halle B6 und auf dem Freigelände FM709. Bauma19_Baublatt_Umschlag.indd 2 31.01.19 10:02 Anzeige Anzeige bauma 2019 Sonderkonditionen WARUM WARTEN? Sichern Sie sich schon heute die Innovationen von Zeppelin und Cat zu bauma Sonderkonditionen! Unser Wort darauf: – Sie erfahren schon heute alles über die bauma Neuheiten von Zeppelin und Cat. – Sie erhalten sämtliche bauma Sonderkonditionen! – Als Frühbesteller sind Sie unser VIP-Gast. Wir freuen uns auf Ihren Besuch auf der bauma in Halle B6 und im Freigelände FM709. Mit zahlreichen Typen in der Klasse 1 bis 2,1 Tonnen sowie 7,7 bis 10 Tonnen präsentiert MINIBAGGER BIS 10 TONNEN Caterpillar eine neue Generation kompakter und starker Maschinen. Alle sind schon jetzt mit Stufe-V-Motoren ausgerüstet. Für den Bediener bieten die Minibagger der neuen Generation CAT 300.9D – 310 komfortablen Zustieg, viel Platz und eine – in dieser Klasse bis jetzt nicht übliche – optionale Klimaanlage. Der LCD-Monitor ermöglicht die individuelle Einstellung der Arbeitshydraulik, aktiviert die Wegfahrsperre, steuert Radio, Heizung, Lüftung und die Klimaanlage. Ganz neu auch in dieser Klasse: die Joystick-Lenkung. Cat 300.9, 301.5, 301.6, 301.7 CR, 301.8, 302 CR, 302.7D CR, 303E CR, 303.5E CR, 304E2 CR, 305E2 CR, 305.5E2 CR, 307.5, 308 CR, 308 CR VAB, 309 CR, 309 CR VAB, 310 MOBILBAGGER BIS 25 TONNEN UMSCHLAGBAGGER BIS 27 TONNEN CAT M314F – M323F CAT MH3022 – MH3026 Mehr Sicherheit, mehr Komfort und weniger Verbrauch sind die wesentlichen Merkmale Die Umschlagbagger der neuen MH3000-Serie sind mit allen wesentlichen Leistungs- und Aus- der Mobilbagger der Serie F. -

Rapid Growth in Rugged Phones September 2017
RAPID GROWTH IN RUGGED PHONES SEPTEMBER 2017 Rapid Growth in Rugged Phones How the market for robust mobile devices is going from strength to strength August 2017, Bullitt Group Research 1. Market dynamics Recent shipment volume estimates for the rugged smartphone market, by independent industry analyst firm CCS Insight, show that 17.7 Growth in the global smartphone market has million rugged smartphones shipped in 2016, slowed significantly in recent years, and is globally. This is forecast to grow to 22.2 million forecast at 6.8% year-on-year for 2017, taking units in 2017, representing a year-on-year shipments for the year to 1.6 billion units.1 increase of 25%. Continued year-on-year Within this vast global market, numerous smaller increases are forecast at a compound annual niche segments exist, servicing the specific growth rate (CAGR) of 18.9% (2016-2021), with needs of their target customer groups with the market set to reach 54.5 million units by differentiated products. 2021.2 Smartphone market year-on-year growth rates The market comprises devices clearly positioned 41.4% as ‘rugged’, and incorporates two sub- categories: 29.6% Consumer rugged smartphones: these devices 12.2% 6.8% are consumer-oriented and retain key 3.3% characteristics of a conventional smartphone. But, they usually carry an ingress protection (IP) 2013 2014 2015 2016 2017(f) rating of 68, and are drop tested onto a hard Source: Strategy Analytics surface from a minimum of 1.2 metres (4ft) – usually as part of support for the MIL-STD-810G One such niche – the rugged smartphone standard. -

Cat ® S60 with Integrated Thermal Imaging
CAT ® S60 WITH INTEGRATED THERMAL IMAGING POWERED BY See the world from a new perspective with the revolutionary Cat® S60. Combining the classic rugged qualities of Cat phones with leading innovation, this new generation of rugged smartphone will allow you to Capture Everything in the palm of your hand. CAPTURE EVERYTHING catphones.com © 2016 Caterpillar. All Rights Reserved. CAT, CATERPILLAR, BUILT FOR IT, their respective catphones.com logos, “Caterpillar Yellow”, the “Power Edge” trade dress as well as corporate and product identity used herein, are trademarks of Caterpillar and may not be used without permission. Bullitt Mobile Ltd is a licensee of Caterpillar Inc. All other trademarks, trade names, product names and logos are the property of their respective owners. Any rights not expressly granted herein are reserved. LIKE A FISH TO WATER The world’s most waterproof smartphone can survive LD FIRS R T F depths of up to 16.4 feet for 60 minutes using our unique O E THERMAL IMAGING W A ** • T Lockdown Switch . The S60 can also take underwater U Fully Integrated S R E E R photographs and video, as well as boasting a glove S U • T ® ® W A MOST WATERPROOF E and wet-finger compatible Corning Gorilla Glass 4 O F R T L * S D R I touchscreen. F to 16.4 ft for 1 Hour KEEP COOL IN TOUGH SITUATIONS Drop-proof up to 6ft and reinforced with a strengthened die cast frame, the Cat S60 exceeds even military specifications, making it the perfect companion to those FEATURE HIGHLIGHTS: A TURNING POINT IN SMARTPHONE INNOVATION living even the most rugged of lifestyles. -

Low-Cost Support for Search and Rescue Operations Using Off-The-Shelf Sensor Technologies
PUBLIC RELEASE Low-Cost Support for Search and Rescue Operations Using Off-The-Shelf Sensor Technologies Petteri Nurmi and Sasu Tarkoma University of Helsinki, Department of Computer Science FI-00014, University of Helsinki, Finland [email protected] / [email protected] Effectiveness of early response is critical to the successful outcome of search-and-rescue operations with the likelihood of survival witnessing a steep decline after 72 hours. Due to the unpredictable and sudden nature of incidents official response is often slow, resulting in people lacking formal training being responsible for early response. To facilitate these people, we introduce low-cost technological solutions for assisting in search-and-rescue missions. We introduce a framework and three prototypes build around our framework and discuss the suitability of different sensing technologies for assisting search-and-rescue missions. INTRODUCTION Every year thousands or even millions of people are affected by disasters that cause ruptures, collapsed structures, or other types of incidents that result in people getting trapped or missing. The key to human survival during these events is the time that a person is trapped or missing, with survival rates declining steeply after 72 hours [4]. The unpredictable and sudden nature of these events combined with their large- scale impact on infrastructure often makes official response slow or even lacking. Consequently, people who lack formal training are forced to take the main responsibility of the search and rescue efforts, especially early on [12]. Two of the key challenges facing these people are identifying survivors among the rubble while at the same time avoiding dangerous situations, and maintaining awareness of locations that are important (e.g., where survivors are trapped). -

CAT Phones & Accessories
The Perfect Phone for every job THE WORLD’S FIRST FULLY INTEGRATED RUGGED Integrated FLIR Indoor Air Quality Sensor Laser Assisted Distance SMARTPHONE CAPABLE OF: Thermal Imaging Camera (VOCs) Measurement Agriculture Construction Automotive First Responders Outdoor Common Features On All Models Waterproof/Dust Proof Drop Resistant Long Battery Life Super Bright Display • ANDROID operating system • ALL UNLOCKED GSM network, global compatibility • WET FINGER/GLOVE ON working screen technology • PROGRAMMABLE SIDE KEY can be used for push to talk applications • APP TOOLBOX preloaded best in class apps Thermal Imaging Use Cases Construction utilities/facilities farming/animals emergency/security (905) 831-6555 | lenbrookcanadasolutions.com 633 Granite Court, Pickering, ON Canada L1W 3K1 ® ©2019 Caterpillar. All Rights Reserved. CAT, CATERPILLAR, LET’S DO THE WORK, their respective logos, “Caterpillar Yellow”, the “Power Edge” and Cat “Modern Hex” trade dress as well as corporate and product identity used herein, are trademarks of Caterpillar and may not be used without permission. Bullitt Mobile Ltd CAT Phones & accessories a licensee of Caterpillar Inc. CAT ® Phones CAT ® ACCESSORIES ® RUGGED ® RUGGED CAT S31 • IP68 and MIL-Spec 810G CAT S41 • IP68 and MIL-Spec 810G CABLES • Waterproof up to 1.2M for • Waterproof up to 2M for *All cables include a cable tie 35 minutes 60 minutes • Drop proof up to 1.8M • Drop proof up to 1.8M • Corning® Gorilla® Glass 3 • Corning® Gorilla® Glass 5 COUNTERTOP DISPLAY Dimensions: 11 ¾” H x 6 ¾” D x 6 ½” W Retail Packaged Dimensions: 7¼” H x 2” D x 4¼” W Features Features CAT-PC-ACL Certified Apple® Lightning® to USB, 6ft., 15 cables CAT-USB-ACL Certified Apple® Lightning® to USB, 10ft. -

Technical Specifications Cat
CAT ® S60 CAT ® S60 WITH INTEGRATED THERMAL IMAGING WITH INTEGRATED THERMAL IMAGING POWERED BY POWERED BY TECHNICAL SPECIFICATIONS Form Factor Bar Type Band EU SKU LTE CAT 4 Band 1/3/7/8/20 (BT52/DS) HSDPA/WCDMA Band 850/900/2100 GSM/GPRS/EDGE Quad-Band 850/900/1800/1900 US SKU LTE CAT 4 Band 2/4/5/7/12/17 (MFBI 12/17) (BT53/SS) HSDPA/WCDMA Band 850/1900/AWS w/diversity GSM/GPRS/EDGE Quad-Band 850/900/1800/1900 Platform Qualcomm MSM8952-3 4x1.5GHz + 4x1.2GHz OS Google Android™ Marshmallow Dimensions 73.4 x 147.9 x 12.95mm Display 4.7” HD, a-Si AHVA, direct bonding, Gorilla® 4, Capacitive Multi-Touch, Wet Finger/Glove auto switch support, Sunlight readability (typ. 500/min. 450 nits), AF coating (anti-finger print) Camera Main 13M AF + Thermal Camera w. Dual LED Flash + Front 5M AF Connectivity GPS/aGPS/Glonass/Beidou, Stereo BT4.1, 802.11 b/g/n (2.4G ), NFC (paring/sharing/payment-google wallet), OTG, FM Radio Memory 32GB ROM / 3 GB RAM I/O Waterproof Micro-USB 2.0 w/ bung, Nano SIM (4FF), 3.5mm audio Jack , Micro SD (up to 128GB) Sensor P + L Sensor, G-Sensor, E-compass, Barometer, Altimeter, Water detect function Audio 1 x loud speaker (front facing and waterproof, Smart Amp), 2 x MIC, 1 x receiver (6x15, waterproof) ,Vibrator Hard Key (Dome keys) Side: power key, volume down/up, programmable key, Front : Home, back, Recent App Battery 3800mAh, Quick Charge 2.0 Other Dual SIM (EU), LED notification (3 colors), Waterproof (underwater 5M/1hour - ME design), 1.8M drop, MIL-STD-810G, Appland, AVG, Swiftkey, Redbend, Tweaker, Office Suite, SD/File Manager, Lucid, Zello PTT support, HAC M3/T3, TTY, WEA/CMAS, LBS, MDM-AFW © 2016 Caterpillar. -

Stock Part No JCB CATERPILLAR KODAK ALCATEL SAMSUNG
Stock Part no JCB Tradesman 2 J127-DSGE-E03-KBB CATERPILLAR CAT B25 CB25-SSEE-K01-KBK CAT B30 - Dual Sim CB30-DSGE-E02-KBB CAT S30 LTE - Dual Sim CS30-DEB-E02-KN CAT S40 LTE - Dual Sim CS40-DEB-E02-KN CAT S60 LTE CS60-DEB-EUR-KN KODAK Kodak Ektra KEKTRA-SEB-EUR-KN ALCATEL Alcatel 1016G 1016G-3AALGB1 Alcatel 20.38 2038X Alcatel 20.45 2045X-2AALGB1 Alcatel 20:51 Clamshell 2051X-3AALGB1 Alcatel 20:12 Clamshell - Last of stock then EOL 2012G-2AALGB1 Alcatel Pixi 4 5" 3G 5010X-2AALGB1 Alcatel Pixi 4 5" LTE 5045X-2AALGB1 Alcatel Pixi 4 5" LTE NFC 5045Y-2AALGB1-1 Alcatel Pixi 4 6'' LTE 9001X-2AALGB1 Alcatel Idol 4 + VR 6055P-2CALGB7-5 Alcatel Pop 4 LTE 5051X-2DALGB1 Alcatel Windows Plus 10 White Tablet 8085-2CALGB1-P Alcatel Pixi 3 8" 4G Smoke Grey Tablet 9022X-2AALGB1 Alcatel A3 5046Y Alcatel A5 LED 5085Y Alcatel U5 LTE 5044Y Alcatel Link Zone LTE MiFi MW40V-2AALGB1 Alcatel Link Zone LTE Dongle IK40V-2AALGB1 Alcatel Movetime Wifi Watch MT10G-2ALCWE1 SAMSUNG Samsung Galaxy J3 (2016) Black SMJ320FZKNBTU Samsung Galaxy J3 (2016) Gold SM-J320FZDNBTU Samsung Galaxy J3 (2016) White SM-J320FZWNBTU Samsung Galaxy J5 (2016) Black SM-J510FZKNBTU Samsung Galaxy J5 (2016) Gold SM-J510FZDNBTU Samsung Galaxy J5 (2016) White SM-J510FZWNBTU Samsung X-Cover 3 Silver VE SMG389FDSABTU Samsung X-Cover 4 SM-G390FZKABTU Samsung Galaxy A3 2017 Edition Black SM-A320FZKNBTU Samsung Galaxy A3 2017 Edition Gold SM-A320FZDNBTU Samsung Galaxy A3 2017 Edition Blue SM-A320FZBNBTU Samsung Galaxy A5 2017 Edition Black SM-A520FZKABTU Samsung Galaxy A5 2017 Edition Gold SM-A520FZDABTU -

Equipment & Tool Rental, Contract #CC-08-06, Co
Equipment & Tool Rental, Contract #CC-28-10, Co-operative Pricing Bid #2-SOCCP Tuesday, May 4, 2010 at 3:00 P.M. Total # Bids Received _9_ Signed Chapt Non- Aff. Coop CD NJ Proposal 33 Coll. Act Y/N Sub. BRC Edward Bixby X X X 5780 Y X X W.E. Timmerman Co Inc 3554 Rt 22 W, PO Box 71 Whitehouse, NJ 08888 908-534-4126 Fax: 534-2320 [email protected] Richard Lindner X X X Need Y X X Envirosight 111 Canfield Ave, Unit B 3 Randolph, NJ 07869 973-252-6700 Fax: 252-1176 [email protected] Peter Stires X X X Need Y X X Pave-Rite Inc 40 Radel Ave, Bridgewater, NJ 08807 732-271-0110 Fax 732-271-8068 [email protected] Anthony Gonnella X X X 25417 Y X X Hertz Equipment Rental Corp 49 W Ferris St, E Brunswick, NJ 08816 732-432-7210 Fax 732-432-7713 [email protected] Douglas Schilke X X X 16481 Y X X Schilke Construction Co Inc 301 Valley Rd Hillsborough, NJ 08844 908-369-8495 Fax: 369-8497 [email protected] Contract #CC-28-10 Continued Signed Chapt Non- Aff. Coop CD NJ Proposal 33 Coll. Act Y/N Sub. BRC Daniel Weber X X X Need Y X X Jack Doheny Rentals / Jet-Vac 777 Doheny Dr Northville, MI 48167 800-336-4369 Fax: 248-349-2774 [email protected] William Ellis Partners, Inc X X X 42296 Y X X D/B/A Volvo Rents 61 County Line Rd, Somerville, NJ 08876 908-203-8008 Fax: 203-8588 [email protected] Ryan Foley X X X 138 Y X X Foley Inc 855 Centennial Ave, PO Box 1555 Piscataway, NJ 08855 732-885-5555 Fax: 885-6655 [email protected] Michael Vittese X X X 31469 Y X X Vacuum Sales Inc 51 Stone Rd, Lindenwold, NJ 08021 800-547-7790 Fax: 856-627-3044 [email protected] VENDOR NAME: Envirosight Envirosight Envirosight LCC W.E. -

Smartphone S60 Cat® Manuale Per L'utente
Smartphone S60 Cat® Manuale per l'utente 5 m 2 m 5 m 2 m Prima di procedere, si raccomanda di leggere quanto di seguito riportato Precauzioni per la sicurezza A garanzia di un uso corretto del cellulare, si raccomanda di leggere accuratamente le precauzioni per la sicurezza. Nonostante la struttura del cellulare sia resistente, si raccomanda di prestare attenzione a evitare urti, lanci, cadute, schiacciamenti, flessioni e forature. Evitare di utilizzare il cellulare in ambienti umidi, ad es. nelle stanze da bagno. Prestare attenzione affinché il cellulare non sia intenzionalmente lavato o immerso in sostanze liquide. Non accendere il cellulare in aree in cui ne sia vietato l'uso o qualora possa essere causa di interferenze o pericolo. Non utilizzare il cellulare durante la guida. Presso le strutture ospedaliere o sanitarie, attenersi alle regole o normative in vigore. Spegnere il cellulare in prossimità di apparecchi medici. Durante i voli in aereo, spegnere il cellulare. Il telefono può causare interferenze a livello dei dispositivi di comando dell'aereo. Spegnere il cellulare in prossimità di dispositivi elettronici di alta precisione. Il telefono potrebbe influire negativamente sul funzionamento di tali dispositivi. Non cercare di smontare il cellulare o i relativi accessori. La manutenzione e/o la riparazione del telefono dovranno essere affidate esclusivamente a personale qualificato. Non riporre il cellulare o i relativi accessori in contenitori con presenza di un forte campo elettromagnetico. Non posizionare il cellulare in prossimità di supporti di archiviazione magnetici. Le radiazioni emesse dal telefono potrebbero cancellare le informazioni memorizzate sui supporti. Non riporre il cellulare in luoghi a temperature elevate, né utilizzarlo in luoghi con presenza di gas infiammabili, ad es. -

Air Radiators Core Catalogue
INDEX Industrial Charge Air 1 Hino 50 SMV 92 Industrial Cores 4 Hitachi 51 Steiger 93 Allis Chalmers 14 Hobart 52 Terex (Franna) 94 Atkinson 15 Hyster 53 Toyota 95 Atlas Copco 16 Inter’ McCormack 54 Trackchief 96 Austral Domino 17 Industrial 55 Volvo 97 Austoft 18 International 56 Wabco 98 Autocar 19 Isuzu 61 Western Star 99 Bearward 20 John Deere 62 White 100 P.J. Berriman 21 Kato 63 Zetor 101 Blaw Knox 22 Kenworth 64 Broomwade 23 Koering 69 Bucyrus Erie 24 Komatsu 70 Case 25 Leader 71 Caterpillar 26 Leyland 73 Chamberlain 30 Libra 74 Clark 31 Linmac 75 Cletrac 32 Mack 76 Comeco 33 Massey Ferguson 78 Compair 34 Mercedes Benz 79 Covrad 36 Michigan 80 Crane Carrier 37 Onan 81 Cummins Industrial 38 Oshkosh 83 Denning 41 P & H 84 Diamond T 42 Perfex 85 Domino (Mining) 43 Perkins Industrial 86 Eimco 44 Peterbilt 87 Euclid 45 Ramaca 88 Fiat 46 R.F.W. 89 Ford (Truck) 47 Scania 90 Freightliner 49 Serck 91 Date Effective July 2008 Note F = Flat HDRS, T = Turned Up HDRS CORE AIR ORIGINAL CORE PART RADIATORS DESCRIPTION H W Th FPI Typ TOP HDR BTM HDR REMARKS NO. PART No. CAF1726 DAW 847 1060 201 7 TUBE 1124 x 292 1124 x 292 GASKET KIT SP-930/SC-92K OR SP-930/C6327K CAF1738 INDUSTRIAL CA 808 840 74 5.5 TUBE 902 x 178 902 x 178 GASKET KIT SP-1470/SC-92K OR SP-1470/C6327K CAF1782 INDUSTRIAL CA 838 590 99 9 TUBE 644 x 178 644 x 178 GASKET KIT SP-1284/SC-92K OR SP-1284/C6327K CAF1795 INDUSTRIAL CA 731 750 99 9 TUBE 816 x 178 816 x 178 GASKET KIT SP-1468/SC-92K OR SP-1468/C6327K CAF1820 INDUSTRIAL CA AIR RAD B12 1048 1030 99 9 TUBE 1105 x 178 1105 x 178 -

Cat® S60 Smartphone Εγχειρίδιο Χρήσης
Cat® S60 Smartphone Εγχειρίδιο χρήσης 5 m 2 m 5 m 2 m Παρακαλείστε να το διαβάσετε πριν προχωρήσετε Προφυλάξεις ασφαλείας Παρακαλείσθε να διαβάσετε τις προφυλάξεις ασφαλείας προσεκτικά για να διασφαλίσετε την ορθή χρήση του κινητού σας τηλεφώνου. Παρά τη φύση αυτής της γερής συσκευής, αποφύγετε να χτυπήσετε, πετάξετε, ρίξετε, πιέσετε, λυγίσετε και τρυπήσετε το κινητό σας τηλέφωνο. Αποφύγετε να χρησιμοποιήσετε το κινητό σας τηλέφωνο σε υγρό περιβάλλον, όπως στο μπάνιο. Αποφύγετε να βρέξετε ή να πλύνετε με υγρό εσκεμμένα το κινητό σας τηλέφωνο. Μην ενεργοποιείτε το κινητό σας τηλέφωνο όταν απαγορεύεται η χρήση τηλεφώνου ή όταν το τηλέφωνο ενδέχεται να προκαλέσει παρεμβολές ή κίνδυνο. Μη χρησιμοποιείτε το κινητό σας τηλέφωνο όταν οδηγείτε. Ακολουθήστε τους κανόνες και τους κανονισμούς σε νοσοκομεία και κέντρα παροχής υπηρεσιών υγείας. Απενεργοποιήσετε το κινητό σας τηλέφωνο κοντά σε ιατρικές συσκευές. Απενεργοποιήσετε το κινητό σας τηλέφωνο εν ώρα πτήσης. Το τηλέφωνο σας ενδέχεται να προκαλέσει παρεμβολές στον εξοπλισμό ελέγχου του αεροσκάφους. Απενεργοποιήστε το κινητό σας τηλέφωνο κοντά σε ηλεκτρονικές συσκευές υψηλής ακρίβειας. Το τηλέφωνο ενδέχεται να επηρεάσει την απόδοση αυτών των συσκευών. Μην προσπαθήσετε να αποσυναρμολογήσετε τον κινητό σας τηλέφωνο ή τα εξαρτήματα του. Μόνο το εξειδικευμένο προσωπικό επιτρέπεται να κάνει σέρβις ή να επισκευάσει το τηλέφωνο σας. Μην τοποθετείτε το κινητό σας τηλέφωνο ή τα εξαρτήματα του σε δοχεία με ισχυρό ηλεκτρομαγνητικό πεδίο. Μην τοποθετείτε μαγνητικά μέσα αποθήκευσης κοντά στο κινητό σας τηλέφωνο. Η ακτινοβολία του τηλεφώνου ενδέχεται να διαγράψει τις πληροφορίες που έχουν αποθηκευτεί μέσα τους. Μην τοποθετείτε το κινητό σας τηλέφωνο σε μέρος με υψηλή θερμοκρασία και μη το χρησιμοποιείτε σε μέρη με εύφλεκτα αέρια όπως σε κάποιο πρατήριο καυσίμων.