Three-Dimensional Rotation Matrices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Math 221: LINEAR ALGEBRA
Math 221: LINEAR ALGEBRA Chapter 8. Orthogonality §8-3. Positive Definite Matrices Le Chen1 Emory University, 2020 Fall (last updated on 11/10/2020) Creative Commons License (CC BY-NC-SA) 1 Slides are adapted from those by Karen Seyffarth from University of Calgary. Positive Definite Matrices Cholesky factorization – Square Root of a Matrix Positive Definite Matrices Definition An n × n matrix A is positive definite if it is symmetric and has positive eigenvalues, i.e., if λ is a eigenvalue of A, then λ > 0. Theorem If A is a positive definite matrix, then det(A) > 0 and A is invertible. Proof. Let λ1; λ2; : : : ; λn denote the (not necessarily distinct) eigenvalues of A. Since A is symmetric, A is orthogonally diagonalizable. In particular, A ∼ D, where D = diag(λ1; λ2; : : : ; λn). Similar matrices have the same determinant, so det(A) = det(D) = λ1λ2 ··· λn: Since A is positive definite, λi > 0 for all i, 1 ≤ i ≤ n; it follows that det(A) > 0, and therefore A is invertible. Theorem A symmetric matrix A is positive definite if and only if ~xTA~x > 0 for all n ~x 2 R , ~x 6= ~0. Proof. Since A is symmetric, there exists an orthogonal matrix P so that T P AP = diag(λ1; λ2; : : : ; λn) = D; where λ1; λ2; : : : ; λn are the (not necessarily distinct) eigenvalues of A. Let n T ~x 2 R , ~x 6= ~0, and define ~y = P ~x. Then ~xTA~x = ~xT(PDPT)~x = (~xTP)D(PT~x) = (PT~x)TD(PT~x) = ~yTD~y: T Writing ~y = y1 y2 ··· yn , 2 y1 3 6 y2 7 ~xTA~x = y y ··· y diag(λ ; λ ; : : : ; λ ) 6 7 1 2 n 1 2 n 6 . -

Quaternions and Cli Ord Geometric Algebras
Quaternions and Cliord Geometric Algebras Robert Benjamin Easter First Draft Edition (v1) (c) copyright 2015, Robert Benjamin Easter, all rights reserved. Preface As a rst rough draft that has been put together very quickly, this book is likely to contain errata and disorganization. The references list and inline citations are very incompete, so the reader should search around for more references. I do not claim to be the inventor of any of the mathematics found here. However, some parts of this book may be considered new in some sense and were in small parts my own original research. Much of the contents was originally written by me as contributions to a web encyclopedia project just for fun, but for various reasons was inappropriate in an encyclopedic volume. I did not originally intend to write this book. This is not a dissertation, nor did its development receive any funding or proper peer review. I oer this free book to the public, such as it is, in the hope it could be helpful to an interested reader. June 19, 2015 - Robert B. Easter. (v1) [email protected] 3 Table of contents Preface . 3 List of gures . 9 1 Quaternion Algebra . 11 1.1 The Quaternion Formula . 11 1.2 The Scalar and Vector Parts . 15 1.3 The Quaternion Product . 16 1.4 The Dot Product . 16 1.5 The Cross Product . 17 1.6 Conjugates . 18 1.7 Tensor or Magnitude . 20 1.8 Versors . 20 1.9 Biradials . 22 1.10 Quaternion Identities . 23 1.11 The Biradial b/a . -

Understanding Euler Angles 1
Welcome Guest View Cart (0 items) Login Home Products Support News About Us Understanding Euler Angles 1. Introduction Attitude and Heading Sensors from CH Robotics can provide orientation information using both Euler Angles and Quaternions. Compared to quaternions, Euler Angles are simple and intuitive and they lend themselves well to simple analysis and control. On the other hand, Euler Angles are limited by a phenomenon called "Gimbal Lock," which we will investigate in more detail later. In applications where the sensor will never operate near pitch angles of +/‐ 90 degrees, Euler Angles are a good choice. Sensors from CH Robotics that can provide Euler Angle outputs include the GP9 GPS‐Aided AHRS, and the UM7 Orientation Sensor. Figure 1 ‐ The Inertial Frame Euler angles provide a way to represent the 3D orientation of an object using a combination of three rotations about different axes. For convenience, we use multiple coordinate frames to describe the orientation of the sensor, including the "inertial frame," the "vehicle‐1 frame," the "vehicle‐2 frame," and the "body frame." The inertial frame axes are Earth‐fixed, and the body frame axes are aligned with the sensor. The vehicle‐1 and vehicle‐2 are intermediary frames used for convenience when illustrating the sequence of operations that take us from the inertial frame to the body frame of the sensor. It may seem unnecessarily complicated to use four different coordinate frames to describe the orientation of the sensor, but the motivation for doing so will become clear as we proceed. For clarity, this application note assumes that the sensor is mounted to an aircraft. -

Parametrizations of K-Nonnegative Matrices
Parametrizations of k-Nonnegative Matrices Anna Brosowsky, Neeraja Kulkarni, Alex Mason, Joe Suk, Ewin Tang∗ October 2, 2017 Abstract Totally nonnegative (positive) matrices are matrices whose minors are all nonnegative (positive). We generalize the notion of total nonnegativity, as follows. A k-nonnegative (resp. k-positive) matrix has all minors of size k or less nonnegative (resp. positive). We give a generating set for the semigroup of k-nonnegative matrices, as well as relations for certain special cases, i.e. the k = n − 1 and k = n − 2 unitriangular cases. In the above two cases, we find that the set of k-nonnegative matrices can be partitioned into cells, analogous to the Bruhat cells of totally nonnegative matrices, based on their factorizations into generators. We will show that these cells, like the Bruhat cells, are homeomorphic to open balls, and we prove some results about the topological structure of the closure of these cells, and in fact, in the latter case, the cells form a Bruhat-like CW complex. We also give a family of minimal k-positivity tests which form sub-cluster algebras of the total positivity test cluster algebra. We describe ways to jump between these tests, and give an alternate description of some tests as double wiring diagrams. 1 Introduction A totally nonnegative (respectively totally positive) matrix is a matrix whose minors are all nonnegative (respectively positive). Total positivity and nonnegativity are well-studied phenomena and arise in areas such as planar networks, combinatorics, dynamics, statistics and probability. The study of total positivity and total nonnegativity admit many varied applications, some of which are explored in “Totally Nonnegative Matrices” by Fallat and Johnson [5]. -

Lecture Notes: Qubit Representations and Rotations
Phys 711 Topics in Particles & Fields | Spring 2013 | Lecture 1 | v0.3 Lecture notes: Qubit representations and rotations Jeffrey Yepez Department of Physics and Astronomy University of Hawai`i at Manoa Watanabe Hall, 2505 Correa Road Honolulu, Hawai`i 96822 E-mail: [email protected] www.phys.hawaii.edu/∼yepez (Dated: January 9, 2013) Contents mathematical object (an abstraction of a two-state quan- tum object) with a \one" state and a \zero" state: I. What is a qubit? 1 1 0 II. Time-dependent qubits states 2 jqi = αj0i + βj1i = α + β ; (1) 0 1 III. Qubit representations 2 A. Hilbert space representation 2 where α and β are complex numbers. These complex B. SU(2) and O(3) representations 2 numbers are called amplitudes. The basis states are or- IV. Rotation by similarity transformation 3 thonormal V. Rotation transformation in exponential form 5 h0j0i = h1j1i = 1 (2a) VI. Composition of qubit rotations 7 h0j1i = h1j0i = 0: (2b) A. Special case of equal angles 7 In general, the qubit jqi in (1) is said to be in a superpo- VII. Example composite rotation 7 sition state of the two logical basis states j0i and j1i. If References 9 α and β are complex, it would seem that a qubit should have four free real-valued parameters (two magnitudes and two phases): I. WHAT IS A QUBIT? iθ0 α φ0 e jqi = = iθ1 : (3) Let us begin by introducing some notation: β φ1 e 1 state (called \minus" on the Bloch sphere) Yet, for a qubit to contain only one classical bit of infor- 0 mation, the qubit need only be unimodular (normalized j1i = the alternate symbol is |−i 1 to unity) α∗α + β∗β = 1: (4) 0 state (called \plus" on the Bloch sphere) 1 Hence it lives on the complex unit circle, depicted on the j0i = the alternate symbol is j+i: 0 top of Figure 1. -

The Rolling Ball Problem on the Sphere
S˜ao Paulo Journal of Mathematical Sciences 6, 2 (2012), 145–154 The rolling ball problem on the sphere Laura M. O. Biscolla Universidade Paulista Rua Dr. Bacelar, 1212, CEP 04026–002 S˜aoPaulo, Brasil Universidade S˜aoJudas Tadeu Rua Taquari, 546, CEP 03166–000, S˜aoPaulo, Brasil E-mail address: [email protected] Jaume Llibre Departament de Matem`atiques, Universitat Aut`onomade Barcelona 08193 Bellaterra, Barcelona, Catalonia, Spain E-mail address: [email protected] Waldyr M. Oliva CAMGSD, LARSYS, Instituto Superior T´ecnico, UTL Av. Rovisco Pais, 1049–0011, Lisbon, Portugal Departamento de Matem´atica Aplicada Instituto de Matem´atica e Estat´ıstica, USP Rua do Mat˜ao,1010–CEP 05508–900, S˜aoPaulo, Brasil E-mail address: [email protected] Dedicated to Lu´ıs Magalh˜aes and Carlos Rocha on the occasion of their 60th birthdays Abstract. By a sequence of rolling motions without slipping or twist- ing along arcs of great circles outside the surface of a sphere of radius R, a spherical ball of unit radius has to be transferred from an initial state to an arbitrary final state taking into account the orientation of the ball. Assuming R > 1 we provide a new and shorter prove of the result of Frenkel and Garcia in [4] that with at most 4 moves we can go from a given initial state to an arbitrary final state. Important cases such as the so called elimination of the spin discrepancy are done with 3 moves only. 1991 Mathematics Subject Classification. Primary 58E25, 93B27. Key words: Control theory, rolling ball problem. -

Orthogonal Reduction 1 the Row Echelon Form -.: Mathematical
MATH 5330: Computational Methods of Linear Algebra Lecture 9: Orthogonal Reduction Xianyi Zeng Department of Mathematical Sciences, UTEP 1 The Row Echelon Form Our target is to solve the normal equation: AtAx = Atb ; (1.1) m×n where A 2 R is arbitrary; we have shown previously that this is equivalent to the least squares problem: min jjAx−bjj : (1.2) x2Rn t n×n As A A2R is symmetric positive semi-definite, we can try to compute the Cholesky decom- t t n×n position such that A A = L L for some lower-triangular matrix L 2 R . One problem with this approach is that we're not fully exploring our information, particularly in Cholesky decomposition we treat AtA as a single entity in ignorance of the information about A itself. t m×m In particular, the structure A A motivates us to study a factorization A=QE, where Q2R m×n is orthogonal and E 2 R is to be determined. Then we may transform the normal equation to: EtEx = EtQtb ; (1.3) t m×m where the identity Q Q = Im (the identity matrix in R ) is used. This normal equation is equivalent to the least squares problem with E: t min Ex−Q b : (1.4) x2Rn Because orthogonal transformation preserves the L2-norm, (1.2) and (1.4) are equivalent to each n other. Indeed, for any x 2 R : jjAx−bjj2 = (b−Ax)t(b−Ax) = (b−QEx)t(b−QEx) = [Q(Qtb−Ex)]t[Q(Qtb−Ex)] t t t t t t t t 2 = (Q b−Ex) Q Q(Q b−Ex) = (Q b−Ex) (Q b−Ex) = Ex−Q b : Hence the target is to find an E such that (1.3) is easier to solve. -

Vectors, Matrices and Coordinate Transformations
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between them, physical laws can often be written in a simple form. Since we will making extensive use of vectors in Dynamics, we will summarize some of their important properties. Vectors For our purposes we will think of a vector as a mathematical representation of a physical entity which has both magnitude and direction in a 3D space. Examples of physical vectors are forces, moments, and velocities. Geometrically, a vector can be represented as arrows. The length of the arrow represents its magnitude. Unless indicated otherwise, we shall assume that parallel translation does not change a vector, and we shall call the vectors satisfying this property, free vectors. Thus, two vectors are equal if and only if they are parallel, point in the same direction, and have equal length. Vectors are usually typed in boldface and scalar quantities appear in lightface italic type, e.g. the vector quantity A has magnitude, or modulus, A = |A|. In handwritten text, vectors are often expressed using the −→ arrow, or underbar notation, e.g. A , A. Vector Algebra Here, we introduce a few useful operations which are defined for free vectors. Multiplication by a scalar If we multiply a vector A by a scalar α, the result is a vector B = αA, which has magnitude B = |α|A. The vector B, is parallel to A and points in the same direction if α > 0. -

Symmetry and Tensors Rotations and Tensors
Symmetry and tensors Rotations and tensors A rotation of a 3-vector is accomplished by an orthogonal transformation. Represented as a matrix, A, we replace each vector, v, by a rotated vector, v0, given by multiplying by A, 0 v = Av In index notation, 0 X vm = Amnvn n Since a rotation must preserve lengths of vectors, we require 02 X 0 0 X 2 v = vmvm = vmvm = v m m Therefore, X X 0 0 vmvm = vmvm m m ! ! X X X = Amnvn Amkvk m n k ! X X = AmnAmk vnvk k;n m Since xn is arbitrary, this is true if and only if X AmnAmk = δnk m t which we can rewrite using the transpose, Amn = Anm, as X t AnmAmk = δnk m In matrix notation, this is t A A = I where I is the identity matrix. This is equivalent to At = A−1. Multi-index objects such as matrices, Mmn, or the Levi-Civita tensor, "ijk, have definite transformation properties under rotations. We call an object a (rotational) tensor if each index transforms in the same way as a vector. An object with no indices, that is, a function, does not transform at all and is called a scalar. 0 A matrix Mmn is a (second rank) tensor if and only if, when we rotate vectors v to v , its new components are given by 0 X Mmn = AmjAnkMjk jk This is what we expect if we imagine Mmn to be built out of vectors as Mmn = umvn, for example. In the same way, we see that the Levi-Civita tensor transforms as 0 X "ijk = AilAjmAkn"lmn lmn 1 Recall that "ijk, because it is totally antisymmetric, is completely determined by only one of its components, say, "123. -
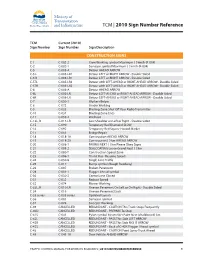
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

Properties of the Single and Double D4d Groups and Their Isomorphisms with D8 and C8v Groups A
Properties of the single and double D4d groups and their isomorphisms with D8 and C8v groups A. Le Paillier-Malécot, L. Couture To cite this version: A. Le Paillier-Malécot, L. Couture. Properties of the single and double D4d groups and their isomorphisms with D8 and C8v groups. Journal de Physique, 1981, 42 (11), pp.1545-1552. 10.1051/jphys:0198100420110154500. jpa-00209347 HAL Id: jpa-00209347 https://hal.archives-ouvertes.fr/jpa-00209347 Submitted on 1 Jan 1981 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. J. Physique 42 (1981) 1545-1552 NOVEMBRE 1981, 1545 Classification Physics Abstracts 75.10D Properties of the single and double D4d groups and their isomorphisms with D8 and C8v groups A. Le Paillier-Malécot Laboratoire de Magnétisme et d’Optique des Solides, 1, place A.-Briand, 92190 Meudon Bellevue, France and Université de Paris-Sud XI, Centre d’Orsay, 91405 Orsay Cedex, France and L. Couture Laboratoire Aimé-Cotton (*), C.N.R.S., Campus d’Orsay, 91405 Orsay Cedex, France and Laboratoire d’Optique et de Spectroscopie Cristalline, Université Pierre-et-Marie-Curie, Paris VI, 75230 Paris Cedex 05, France (Reçu le 15 mai 1981, accepté le 9 juillet 1981) Résumé. -

Chapter Four Determinants
Chapter Four Determinants In the first chapter of this book we considered linear systems and we picked out the special case of systems with the same number of equations as unknowns, those of the form T~x = ~b where T is a square matrix. We noted a distinction between two classes of T ’s. While such systems may have a unique solution or no solutions or infinitely many solutions, if a particular T is associated with a unique solution in any system, such as the homogeneous system ~b = ~0, then T is associated with a unique solution for every ~b. We call such a matrix of coefficients ‘nonsingular’. The other kind of T , where every linear system for which it is the matrix of coefficients has either no solution or infinitely many solutions, we call ‘singular’. Through the second and third chapters the value of this distinction has been a theme. For instance, we now know that nonsingularity of an n£n matrix T is equivalent to each of these: ² a system T~x = ~b has a solution, and that solution is unique; ² Gauss-Jordan reduction of T yields an identity matrix; ² the rows of T form a linearly independent set; ² the columns of T form a basis for Rn; ² any map that T represents is an isomorphism; ² an inverse matrix T ¡1 exists. So when we look at a particular square matrix, the question of whether it is nonsingular is one of the first things that we ask. This chapter develops a formula to determine this. (Since we will restrict the discussion to square matrices, in this chapter we will usually simply say ‘matrix’ in place of ‘square matrix’.) More precisely, we will develop infinitely many formulas, one for 1£1 ma- trices, one for 2£2 matrices, etc.