Conceptual Design Document ARGUS Auto-Tracking RF Ground
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
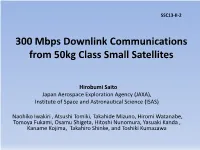
Fig. 1 System Block Diagram
SSC13-II-2 300 Mbps Downlink Communications from 50kg Class Small Satellites Hirobumi Saito Japan Aerospace Exploration Agency (JAXA), Institute of Space and Astronautical Science (ISAS) Naohiko Iwakiri , Atsushi Tomiki, Takahide Mizuno, Hiromi Watanabe, Tomoya Fukami, Osamu Shigeta, Hitoshi Nunomura, Yasuaki Kanda , Kaname Kojima, Takahiro Shinke, and Toshiki Kumazawa Contents 1. Purpose : 320Mbps down link for small sat 2. Onboard segment: high effiency transmitter. small antenna 3. Ground segment : 3.8m S/X band antenna powerful receiver 4. Total simulation : SPW software + link calculation 5. EM test finished. FM maunfacturing now. 6. On-orbit demonstration : 2014 with 50kg sat. Limits of Small Satellites for Earth Observations • Mass Limit(<100kg), Power Limit (<100W) ー Telescope Resolution (5m vs. 0.5m) ー Down link Speed (10Mbps vs. 800Mbps) ・ What is the Bottleneck of Down Link Speed ? - Power ! Down link bit rate VS. satellite mass for low earth orbit. 1.0E+12 ) 1T bps TerraSAR-X Hodoyoshi #4 ( (2014) WorldView1 1.0E+09 EROS-B Formosat2 GeoEye-1 1G Orbview3Kompsat2 ALOS Orbview4 JERS1 EOS-PM1 Ikonos2 Radarsat1 TopSat QuickBird2 ERSEnvisat1 Lewis Landsat ADEOS Spot RazakSat-1 UK-DMC2 MOS 1B MOS 1A Terra IRS-1A,1B,1C UK-DMC1 EROS-A AS1000 AlSat Orbview2 TRMM 1.0E+06 データ伝送速度 1M EarlyBird MicroLabSat Cute-1.7 PRISM TOMS-EP Cute-I Down Link Bit Rate(bps) Link Down Bit 観測衛星の 1.0E+031K 1 10 100 1000 10000 Satellite衛星質量 Mass(kg) (kg) High Speed Down Link for Small Sat • Purpose of This Research: High-speed Down Link System with Low Power Consumption ―Goal 50kg Sat @600km orbit DC power <20W, 320Mbps Small Ground Antenna < 4m System block diagram of high-data-rate downlink. -

Development of Earth Station Receiving Antenna and Digital Filter Design Analysis for C-Band VSAT
INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 3, ISSUE 6, JUNE 2014 ISSN 2277-8616 Development of Earth Station Receiving Antenna and Digital Filter Design Analysis for C-Band VSAT Su Mon Aye, Zaw Min Naing, Chaw Myat New, Hla Myo Tun Abstract: This paper describes the performance improvement of C-band VSAT receiving antenna. In this work, the gain and efficiency of C-band VSAT have been evaluated and then the reflector design is developed with the help of ICARA and MATLAB environment. The proposed design meets the good result of antenna gain and efficiency. The typical gain of prime focus parabolic reflector antenna is 30 dB to 40dB. And the efficiency is 60% to 80% with the good antenna design. By comparing with the typical values, the proposed C-band VSAT antenna design is well optimized with gain of 38dB and efficiency of 78%. In this paper, the better design with compromise gain performance of VSAT receiving parabolic antenna using ICARA software tool and the calculation of C-band downlink path loss is also described. The particular prime focus parabolic reflector antenna is applied for this application and gain of antenna, radiation pattern with far field, near field and the optimized antenna efficiency is also developed. The objective of this paper is to design the downlink receiving antenna of VSAT satellite ground segment with excellent gain and overall antenna efficiency. The filter design analysis is base on Kaiser window method and the simulation results are also presented in this paper. Index Terms: prime focus parabolic reflector antenna, satellite, efficiency, gain, path loss, VSAT. -
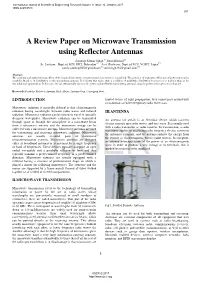
A Review Paper on Microwave Transmission Using Reflector Antennas
International Journal of Scientific & Engineering Research Volume 8, Issue 10, October-2017 ISSN 2229-5518 251 A Review Paper on Microwave Transmission using Reflector Antennas Sandeep Kumar Singh [1],Sumi Kumari[2] Sr. Lecturer, Dept. of ECE, JBIT, Dehradun [1], Asst. Professor, Dept. of ECE, VGIET, Jaipur[2] [email protected][1] [email protected][2] Abstract: The conventional optimization problem of the beamed microwave energy transmission system is considered. The criterion of maximum efficiency of power intercept is parabolic function of distribution on the transmitting antenna. It is shown that under such a condition of amplitude distribution becomes more uniform than as the unconditional optimization. In this case, we can substantially increase the power radiated by the transmitting antenna losing the power intercept no more than 2%. Keywords: Parabolic Reflector Antenna, Radio Relay, Antenna Gain, Cassegrain Feed. I.INTRODUCTION limited to line of sight propagation; they cannot pass around hills or mountains as lower frequency radio waves can. Microwave radiation is generally defined as that electromagnetic radiation having wavelengths between radio waves and infrared III.ANTENNA radiation. Microwave radiation can be forced to travel in specially designed waveguides. Microwave radiation can be transmitted An antenna (or aerial) is an electrical device which converts through space or through the atmosphere in a microwave beam electric currents into radio waves, and vice versa. It is usually used from a microwave antenna and the microwave energy can be with a radio transmitter or radio receiver. In transmission, a radio collected with a microwave antenna. Microwave antennas are used transmitter applies an oscillating radio frequency electric current to for transmitting and receiving microwave radiation. -

Design and Construction of a Cost-Effective Parabolic Satellite Dish Using Available Local Materials
International Journal of Advanced Materials Research Vol. 5, No. 3, 2019, pp. 46-52 http://www.aiscience.org/journal/ijamr ISSN: 2381-6805 (Print); ISSN: 2381-6813 (Online) Design and Construction of a Cost-effective Parabolic Satellite Dish Using Available Local Materials Gbadamosi Ramoni Adewale * Faculty of Science, National Open University of Nigeria, Akure, Nigeria Abstract Communication through satellite is very important at this information age. It can provide complete global coverage. It can be used to send and receive information in remote area where other technology may fail. Communication signals are sent in form of electromagnetic signal which are intercepted by the parabolic dish. The offered high-efficiency and high-gain by the parabolic dish makes it appropriate for direct broadcast satellite reception. However, parabolic dish procurement in developing countries is very expensive. This makes it to be unaffordable to majority of the masses. This paper focuses on design and construction of cheap parabolic satellite dish using local readily available materials. An indigenous technology is exploited to achieve the goal of this work. The paper describes from the scratch, how to design and construct a parabolic dish that can be used to intercept electromagnetic signals from the satellite stationed in the space. The proposed design approach offers a number of advantages such as cost-effectiveness and high simplicity. These are due to the fact that; it can be effectively developed with the easily available materials. Besides, it development demands neither special/long time training nor skill. Thus, both technical and non-technical personnel with minimal training can construct it either for commercial and/or personal use. -

A Feasibility Study of Techniques for Interplanetary Microspacecraft Communications
SSC03-X-8 A Feasibility Study of Techniques for Interplanetary Microspacecraft Communications G. James Wells Dr. Robert E. Zee PhD Candidate Manager, Space Flight Laboratory [email protected] [email protected] (416) 667-7731 (416) 667-7864 Space Flight Laboratory University of Toronto Institute For Aerospace Studies 4925 Dufferin Street, Toronto, Ontario, Canada, M3H 5T6 Abstract. The increasing capabilities and low cost of microsatellites makes them ideal tools for new and advanced space science missions, including their possible use as interplanetary exploration probes. There are many issues that have to be resolved when it comes to employing microspacecraft on such missions. One problem is how to maintain a reliable communications link with the microspacecraft over long, interplanetary distances. Solutions to this problem include either improving the spacecraft transceiver/antenna, using a very large antenna on the ground, or using an array of small antennas on the ground. When looking at the feasibility and costs of these alternatives, it is shown that an array seems to be an ideal solution to the problem. By using several digital signal processing techniques, it should be possible to array a group of commercial-grade amateur ground stations together to synthesize a large-aperture antenna capable of communicating over interplanetary distances while keeping the costs low enough to be sustained by a microspace program. Future hardware experiments will be performed to confirm. Introduction a reasonably wide-bandwidth data link between the ground and a microsatellite at a very high altitude. The increasing capabilities and low cost of Most microsatellites in LEO can maintain a downlink micorsatellite missions make them attractive for data rate of no more than 128 kbps. -

Microwave Antennas Ks-5708 List 1 Perforated Parabolic Antenna Description
402-431-100 PRACTICES SECTION BELL SYSTEM Issue 1, July, 1947 Plont Series AT&TCo Standard MICROWAVE ANTENNAS KS-5708 LIST 1 PERFORATED PARABOLIC ANTENNA DESCRIPTION CONTENTS PAGE 2. CIRCUIT DESCRIPTION CAl 57" Parabolic Reflector Antenna 1. GENERAL . 2.01 The layout of this antenna is shown in 2. CIRCUIT DESCRIPTION Figure 1, page 4. It has a wave guide feed at the focal point of the parabolic reflector and CAl 57" Parabolic Reflector Antenna sprays the electromagnetic energy at it in the form of spherical waves. The waves in turn are 3. EQUIPMENT FEATURES . reflected outward as essentially plane waves as a result of the contour. The narrowness of beam CAl 57" Parabolic Reflector Antenna depends upon the diameter of the reflector, which in this case is 57 inches. This develops a 4. TRANSMISSION CHARACTERISTICS . 2 beam width of about 3.5 degrees between 3 db points as shown in the directivity pattern in CAl 57" Parabolic Reflector Antenna 2 Figure 2, page 5. The gain of the antenna at 4100 me is 31 db over a half-wave dipole; the 5. PHOTOGRAPH AND FIGURES 2 gain vs. frequency characteristic is shown in Figure 3, page 6. The back-to-hack pickup by a like antenna is about 75 db down. _'"_]. GENERAL 1.01 This section pertains to the 57" parabolic 3. EQUIPMENT FEATURES (KS-5708). Circuit and reflector antenna CAl 57" Parabolic Reflector Antenna equipment data are included, as well as trans mission characteristics. Related photographs 3.01 The parabolic dish is a perforated alumi- and drawings are also included. -

ANTENNA INTRODUCTION / BASICS Rules of Thumb
ANTENNA INTRODUCTION / BASICS Rules of Thumb: 1. The Gain of an antenna with losses is given by: Where BW are the elev & az another is: 2 and N 4B0A 0 ' Efficiency beamwidths in degrees. G • Where For approximating an antenna pattern with: 2 A ' Physical aperture area ' X 0 8 G (1) A rectangle; X'41253,0 '0.7 ' BW BW typical 8 wavelength N 2 ' ' (2) An ellipsoid; X 52525,0typical 0.55 2. Gain of rectangular X-Band Aperture G = 1.4 LW Where: Length (L) and Width (W) are in cm 3. Gain of Circular X-Band Aperture 3 dB Beamwidth G = d20 Where: d = antenna diameter in cm 0 = aperture efficiency .5 power 4. Gain of an isotropic antenna radiating in a uniform spherical pattern is one (0 dB). .707 voltage 5. Antenna with a 20 degree beamwidth has a 20 dB gain. 6. 3 dB beamwidth is approximately equal to the angle from the peak of the power to Peak power Antenna the first null (see figure at right). to first null Radiation Pattern 708 7. Parabolic Antenna Beamwidth: BW ' d Where: BW = antenna beamwidth; 8 = wavelength; d = antenna diameter. The antenna equations which follow relate to Figure 1 as a typical antenna. In Figure 1, BWN is the azimuth beamwidth and BW2 is the elevation beamwidth. Beamwidth is normally measured at the half-power or -3 dB point of the main lobe unless otherwise specified. See Glossary. The gain or directivity of an antenna is the ratio of the radiation BWN BW2 intensity in a given direction to the radiation intensity averaged over Azimuth and Elevation Beamwidths all directions. -
ESOG 120 Issue 8 – Rev
TYPE APPROVAL AND CHARACTERIZATION PROCEDURES ESOG 120 Issue 8 – Rev. 1, May 2021 Antennas and Transmissions Team Antenna and VSAT Type Approval/Characterization ESOG 120 – Issue 8 - Rev. 1 May 2021 Antennas and VSATs Type Approval / Characterization Table of Contents Forward .................................................................................................................................. v 1 Overview of the ESOG modules ...................................................................................... 6 1.1 Volume I: Eutelsat S.A. system management and policies ........................................................ 6 1.2 Volume II: Eutelsat S.A. system operations and procedures ..................................................... 6 2 Introduction ................................................................................................................... 7 2.1 About this document .................................................................................................................. 7 2.2 Disclaimer ................................................................................................................................... 7 2.3 Eutelsat certification .................................................................................................................. 7 2.3.1 Type Approval ........................................................................................................................ 8 2.3.2 Characterization .................................................................................................................... -

Microwave Antenna Performance Metrics
Chapter 5 Microwave Antenna Performance Metrics Paul Osaretin Otasowie Additional information is available at the end of the chapter http://dx.doi.org/10.5772/48517 1. Introduction An antenna is a conductor or group of conductors used for radiating electromagnetic energy into space or collecting electromagnetic energy from space. When radio frequency signal has been generated in a transmitter, some means must be used to radiate this signal through space to a receiver. The device that does this job is the antenna. The transmitter signal energy is sent into space by a transmitting antenna and the radio frequency energy is then picked up from space by a receiving antenna. The radio frequency energy that is transmitted into space is in the form of an electromagnetic field. As the electromagnetic field arrives at the receiving antenna, a voltage is induced into the antenna. The radio frequency voltage induced into the receiving antenna is then passed into the receiver. There are many different types of antennas in use today but emphasis is on antennas that operate at microwave frequencies. This chapter discusses the two major types microwave antenna which are the horn-reflector and parabolic dish antennas. In order to satisfy antenna system requirements for microwave propagation and choose a suitable antenna system, microwave design engineers must evaluate properly these antenna properties in order to achieve optimum performance. 1.1. Definition of microwave and microwave transmission Microwaves refer to radio waves with wavelength ranging from as long as one meter to as short as one millimeter or equivalently with frequencies between 300MHZ (0.3GHZ) and 300GHZ. -

French by Satellite. PUB DATE 93 NOTE 22P.; Paper Presented at the Annual Meeting of the American Council on the Teaching of Foreign Languages (San Antonio, TX, 1993)
DOCUMENT RESUME ED 371 639 FL 022 309 AUTHOR Rose, Russell G. TITLE French by Satellite. PUB DATE 93 NOTE 22p.; Paper presented at the Annual Meeting of the American Council on the Teaching of Foreign Languages (San Antonio, TX, 1993). PUB TYPE Reports Descriptive (141) EDRS PRICE MF01/PC01 Plus Postage. DESCRIPTORS *Broadcast Television; Class Activities; Classroom Techniques; College Second Language Programs; Commercial Television; Foreign Countries; *French; Higher Education; Information Sources; Instructional Materials; *Language Role; *Media Selection; *Programming (Broadcast); Satellites (Aerospace); Second Language Instruction; *Second Languages IDENTIFIERS *Authentic Materials; Quebec ABSTRACT Satellite television is proposed as a useful source of authentic materials for French language instruction at the college level. It is argued that this medium illustrates to students that the language is used in a wide variety of everyday situations and contexts. The discussion begins with a brief description of common satellite technology, facilities, and capabilities, and of programming available for second language instruction. Both general programming and subscription services are noted. Two main satellite television sources for French language materials, both from Canada, are then described in greater detail. One isavailable in the United F;tates only by satellite transmission. It provides varied programming, and contains no commercials. The second is a commercial network much like those known in the United States. A number of regular programs from each source is summarized. These include news programs and magazines, game shows, advice andinformation programs, children's provamming, ari instructional and interview shows. Several classroom techniques for use of the materials are offered. Appended materials include lists of sources for further information, equipment, and publications; illustrations of satellite equipment and systems; and sample program schedules. -

AND I^-BAND TRACKING FEED for a TORS REFLECTOR ANTENNA Tradeoff Study JC Pullara, CW Bales, GP Kefalas and M. Uyeh
https://ntrs.nasa.gov/search.jsp?R=19750002240 2020-03-23T03:25:59+00:00Z DUAL S- AND I^-BAND TRACKING FEED FOR A TORS REFLECTOR ANTENNA Tradeoff Study J.C. Pullara, C.W. Bales, G.P. Kefalas and M. Uyehara Martin Marietta Aerospace Corporation P.O. Box 5837 Prlando, Florida 32805 August 1974 Final Report (Phase I) for Period-August 1973 - June 1974 Prepared for NASA GODDARD SPACE FLIGHT CENTER Greenbelt, Maryland 20771 •"«!*W•i • Report No. 2. Government Accession No. 3. Recipient's Catalog No. Final (Phase I) j Title and Subtitle 5. Report Date l DUAL S- AND Ky-BAND TRACKING FEED FOR A TORS August 1974 I REFLECTOR ANTENNA 6. Performing Organization Code Author(s) Joseph C. Pullara, C. William Bales, 8. Performing Organization Report George P. Kefalas, and Masao Uyehara No. OR 13,225 Performing Organization Name and Address 10. Work Unit No. Martin Marietta Aerospace Corporation P.O. Box 5837 Orlando, Florida 32805 11. Contract or Grant No. NAS5-20415 13. Type of Report and Period Covered Sponsoring Agency Name and Address Phase I Final Report NASA, L.R. Dod (Project Manager) August 1973 - June 1974 GODDARD SPACE FLIGHT CENTER 14. Sponsoring Agency Code Greenbelt, Maryland 20771 Supplementary Notes Abstract This report presents the results of a trade study designed to identify a synchronous satellite antenna system suitable for receiving and trans- mitting data from lower orbiting satellites at both S- and Ku-bands simul- taneously as part of the Tracking and Data Relay Satellite System (TDRSS). The study addresses all related problems associated with maintaining a data link between two satellites with a Ku-band half-power beamwidth of 0.4 dB. -
Antennas and Propagation
Antennas and Propagation Guevara Noubir [email protected] Textbook: Wireless Communications and Networks, William Stallings, Prentice Hall 1 Outline • Antennas • Propagaon Modes • Line of Sight Transmission • Fading in Mobile Environment and Compensaon 2 Decibels • The Decibel Unit: – Standard unit describing transmission gain (loss) and relave power levels – Gain: N(dB) = 10 log(P2/P1) – Decibels above or below 1 W: N (dBW) = 10 log(P2/1W) – Decibels above or below 1 mW: N(dBm) = 10log(P2/1mW) • Example: – P = 1mW => P(dBm) = ? ; P(dBW) = ? – P = 10mW => P(dBm) = ? ; P(dBW) = ? 3 Introduction • An antenna is an electrical conductor or system of conductors – Transmission: radiates electromagnetic energy into space – Reception: collects electromagnetic energy from space • In two-way communication, the same antenna can be used for transmission and reception 4 Basics of Radio-waves Propagaon • Radiowave propagaon: – Radiowaves: electromagne1c waves – Signal energy: electrical field (E) and magne1c field (H) – E and H are sinusoidal func1ons of 1me – The signal is aenuated and affected by the medium • Antennas – Form the link between the guided part and the free space: couple energy – Purpose: • Transmission: efficiently transform the electrical signal into radiated electromagne1c wave (radio/microwave) • Recep1on: efficiently accept the received radiated energy and convert it to an electrical signal 5 Radiation Patterns • Radiation pattern – Graphical representation of radiation properties of an antenna – Depicted as two-dimensional cross section