Preliminary Investigation of the Design of a Mechanically Antagonistic, Actuating Countermeasure Garment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Investigation of the Impact of Compression Garments on Endurance Running Performance and Exercise Induced Muscle Damage in the Lower Leg
Minor Dissertation prepared in partial fulfilment of the Master of Science in Exercise and Sports Physiotherapy Degree Investigation of the impact of compression garments on endurance running performance and exercise induced muscle damage in the lower leg University of Cape Town Department of Human Biology Division of Exercise Science and Sports Medicine University of Cape Town Student Investigator: Grethe Geldenhuys Supervisor: A/Prof Andrew Bosch Co-supervisor: Dr Jeroen Swart 2017 The copyright of this thesis vests in the author. No quotation from it or information derived from it is to be published without full acknowledgement of the source. The thesis is to be used for private study or non- commercial research purposes only. Published by the University of Cape Town (UCT) in terms of the non-exclusive license granted to UCT by the author. University of Cape Town Declarations DECLARATION I, Alda Grethe Geldenhuys, hereby declare that the work on which this dissertation is based is my original work (except where acknowledgements indicate otherwise) and that neither the whole work nor any part of it has been, is being, or is to be submitted for another degree in this or any other university. No part of this dissertation may be reproduced, stored in a retrieval system, or transmitted in any form or means without prior permission in writing from the author or the University of Cape Town. Signature Signature Removed __________________________ Date ____________15 August 2017_ 2 | P a g e Acknowledgements “It always seems impossible until it is done.” (Nelson Rolihlahla Mandela) My praise to God through whom all things are possible. -
Product Guide (PDF)
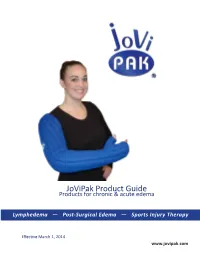
JoViPak Product Guide Products for chronic & acute edema Lymphedema — Post-Surgical Edema — Sports Injury Therapy Effective March 1, 2014 www.jovipak.com Welcome to JoViPak! As a global leader, the team at JoViPak® is serious about finding the best answers for treating acute and chronic edema and related venous insufficiency. Thanks to the input from doctors, therapists and patients from around the world, we continue to innovate and add new products. Tested for functionality and effectiveness, JoViPak® products are user friendly and comfortable, leading to improved compliance with positive therapeutic outcomes. We welcome your questions and thoughts as we continue our efforts to bring the latest innovation and technology for the effective and efficient treatment of Lymphedema, Venous Insufficiency, Post-Surgical Edema Management and Sports Injury Therapy. We want to hear about your experience. Please send your comments to: [email protected] PRODUCT APPLICATION JoViPak® garments are used for treating and managing edema as well as complimentary devices in the management of wounds and support of a joint or compromised tissue where edema is problematic. Presenting the JoViPak® product lines: Rehab Line addresses swelling around a joint, and in many cases is a complete system of support and compression in one garment. Vascular Insufficiency Garments are designed to facilitate easy wound access and provide a management system which supports vascular health. The Combi styles are slimline padded daytime garments with therapeutic benefits for fibrosis, which flat or circular knit daytime compression garments cannot accomplish. Transition Line is an easy donn/doff system with multiple applications for edema management as a bandage and pump liner. -

Chapter 7 APPLICATIONS of COMPRESSION SPORTSWEAR
Chapter 7 APPLICATIONS OF COMPRESSION SPORTSWEAR Praburaj Venkatraman and David Tyler Table of contents 1. Introduction 2. Background and rationale 3. Compression and its influence on physiology 4. Compression for medical uses 5. Evaluation of compression for sportswear 5.1 Effects of using compression garments 6. Application of compression sportswear 6.1Cycling 6.2 Skiing 6.3 Rugby 7 Market trends in compression sportswear 8 Contextual factors affecting compression garment performance 1. Garment sizing 2. Body shape 3. Sizing and designing with stretch fabrics 4. Fabric panels 9 Summary and conclusions 10 References 1.0 INTRODUCTION Sport and exercise involves physical movement of the body (torso, upper and lower limbs) and, in some cases, amateurs and professionals alike endure soft tissue injury. At the elite level, improved individual performance during a tournament or a game is vital. Many athletes consider that compression of muscles to support, enhance muscle alignment and improve the efficiency of muscle movements is essential. They also adopt the adage of strapping the injured part to assist recovery from injury. In recent years, there has been an increase in usage and demand for compression garments for a 1 number of sportswear applications and recreational activities due to their ability to offer functional support to the wearer. The main aim of this chapter is to present research relating to compression garments and highlight the recent developments relating to specific sports such as cycling, skiing and rugby. The benefits of compression garments were documented in various settings (sports, clinical and non-clinical), although convincing evidence remains elusive. The reported benefits of using compression garments were mainly in enhancing blood circulation, reducing the recurrence of injury, aiding recovery, providing muscle support and reducing muscle soreness. -

Filing Coversheet
Cigna Health and Life Insurance Company may change the premiums of this Policy only once per Calendar Year, on January 1st at renewal, after 60 days’ written notice to the Insured Person. However, We will not change the premium schedule for this Policy on an individual basis, but only for all Insured Persons in the same class and covered under the same Policy as You. Cigna Health and Life Insurance Company (“Cigna”) Cigna California Bronze Notice of Right to Examine Policy If You are not satisfied, for any reason, with the terms of this Policy, You may return it by mail or other delivery method, to Us not less than 10 days of receipt for enrollees under age 65, or within 30 days of receipt for enrollees age 65 and over, except for Federally Eligible Defined Individuals. You shall be permitted to return the Policy after its delivery to You and to have any premium paid or membership fees refunded. We will then cancel Your coverage as of the original Effective Date This Policy will then be null and void. If You wish to correspond with Us for this or any other reason, write: Cigna Individual Services P. O. Box 30365 Tampa, FL 33630-3365 1-877-484-5967 Include Your Cigna identification number with any correspondence. This number can be found on Your Cigna identification card. THIS POLICY MAY NOT APPLY WHEN YOU HAVE A CLAIM! PLEASE READ! This Policy was issued to You by CIGNA HEALTH AND LIFE INSURANCE COMPANY (referred to herein as Cigna) based on the information You provided in Your application, a copy of which is attached to the Policy. -

Comparison of Abdominal Compression Devices in Persons with Abdominal Paralysis Due to Spinal Cord Injury
Spinal Cord Series and Cases (2019) 5:35 https://doi.org/10.1038/s41394-019-0176-x ARTICLE Comparison of abdominal compression devices in persons with abdominal paralysis due to spinal cord injury 1 2 2 Michaela de Groot ● Jennifer Swartz ● Jennifer Hastings Received: 6 December 2018 / Revised: 6 March 2019 / Accepted: 17 March 2019 © International Spinal Cord Society 2019 Abstract Study Design Single subject design with five subjects. Objectives The objetive of this study is to compare the effectiveness and usability of alternative commercial abdominal compression garments with participants’ usual medical binders. Setting Private residences in Pierce and King Counties, WA, USA. Methods Participants wore each garment for 5 days followed by a 2-day washout in personal binder. Week 1: Personal binder. Weeks 2 and 3: Randomly ordered test garments (tank, bodysuit). Physiologic measurements: blood pressure (SBP, DBP), blood oxygen saturation (SaO2), forced expiratory volume in one second (FEV1), and heart rate (HR). Participants 1234567890();,: 1234567890();,: completed logs twice daily for 5 days per garment regarding ease of use, comfort, respiration, and appearance. We certify that all applicable institutional and governmental regulations concerning the ethical use of human volunteers were followed during the course of this research. Results The use of a personal binder results in significant increases in SBP and FEV1. Personal binders support FEV1 significantly better than test garments. There is no difference in SBP between test garments and personal binders. There are no significant differences between DBP, SaO2, or HR between participants’ personal binders and no binder. Participants reported that neither tank nor bodysuit felt adequately supportive or easy to use. -

Performance of Compression Garments for Cyclists
Venkatraman et al PERFORMANCE OF COMPRESSION GARMENTS FOR CYCLISTS The Textile Institute’s International Conference on ADVANCES IN FUNCTIONAL TEXTILES 25-26th July 2013 Chancellor’s Hotel and Conference Centre, Manchester, UK Authors: Venkatraman, P.D., Tyler, D.J., Ferguson-Lee, L., and Bourke, A. Manchester Metropolitan University Department of Clothing Design and Technology Hollings Faculty, Old Hall Lane, Manchester, UK M14 6HR Abstract Base layer compression garments had been used by professional cyclists to enhance their performance. To date there is significant body of evidence relating to compression modalities in treating patients suffering from leg ulcers. However, research relating to sportswear compression garment is varied and inconclusive, a few research suggested benefit to athletes or aid recovery from exercise. This depends on a number of factors such as material (fabric/garment design, interaction), athlete (body shape, intensity of use, fitness, and perception) and type of sport or use (intensive or casual). The current research intends to establish a knowledge base by exploring the performance of garments using a combination of laboratory investigations and wearer perceptions. Four commercially available compression garments were evaluated for its performance. These include two professional brands (SKINS, RAPHA) and retail brands (Sub-dual and Sports Direct Muddyfox). The pressure profile of these garments was investigated on participants using Tekscan pressure sensors on various points (lower limb). Wearer trial investigated their perceptions for its fit, comfort, ease of wear, tactile sensation, and overall satisfaction. Various textile parameters evaluating garment durability, comfort, colourfastness and stability facilitated in determining its efficacy. In addition, wearer trials were conducted to measure physiological measurements. -
Compression Garments I S S U E 2
LISG Lymphedema Information Support Group V o l u m e 8 Compression Garments I s s u e 2 Inside this issue: GRADIENT COMPRESSION GARMENTS Gradient Compression 1-7 Gradient compression garments ensure that counter pressure is greatest at the garments most distant (distal) part of the limb with gradual decreasing pressure toward the nearest (proximal) part of the affected area or body. These garments assist the body’s natural mechanism for venous and lymph return from the extremity. According to a report given at the September 1998, NLN (National Lymphede- 3 “Happenings” 8 ma Network Conference) held in San Francisco, the percentage (%) ratio of lymphedema fluid reduction compared with garment and exercise compliance A Bona-Fide time is: Therapist Compliance time % of reduction 100% 79.0% 50% 39.6% 0-25% less than 30.0% Contact Us 9 Any gradient compression garment over 20mmHg (millimeters of mercury pres- sure) is designated a “medical compression garment” and requires a prescription from a medical doctor for fitting. Garments can be purchased over the counter as “ready made” if measurements of the affected area adapt to a standard size range. More Information When the affected area is over sized or not within the standard size range, a custom about Current garment, made to specific limb/area measurements, is ordered, usually requiring 3-4 Lymphatic Research can weeks delivery. Despite “old ideas” garments are becoming “more fashionable”. be found at: Colors such as: mocha, champagne, barely black, pearl, mink, navy, silky beige and the “old stand by’s” black and white, make wearing compression the “IN THING” now. -

Compression Garments for Medical Therapy and Sports
polymers Review Compression Garments for Medical Therapy and Sports Ying Xiong 1 and Xiaoming Tao 1,2,* 1 Institute of Textiles and Clothing, The Hong Kong Polytechnic University, Hung Hom, Hong Kong, China; [email protected] 2 Department of Biomedical Engineering, The Hong Kong Polytechnic University, Hung Hom, Hong Kong, China * Correspondence: [email protected]; Tel.: +852-2766-6470 Received: 14 May 2018; Accepted: 12 June 2018; Published: 14 June 2018 Abstract: Compression garments are elastic clothing with an engineered compression gradient that can be worn on limbs, upper, lower, or full body to use for therapy and sports. This article presents an overview and review on the compression garments and concentrates on the design of compression garments with an appropriate pressure for specific applications. It covers the types of compression garments, fibers and yarns, knitted fabric construction, garment design, an evaluation system, and pressure measurement and modeling. The material properties, fabric properties, pressure modeling, and the garment design system presents the prediction, design, and fabrication of the compression garments. Lastly, the research status and directions are discussed. Keywords: compression garment; pressure therapy; sportswear; material; knitting; design; modeling 1. Introduction Compression garments are special clothing containing elastomeric fibers and yarns used to apply substantial mechanical pressure on the surface of needed body zones for stabilizing, compressing, and supporting underlying tissues [1]. They have been widely researched and utilized in the fields of medical applications, athletic applications, and body-shaping applications [2]. The first mention of compression therapy appeared in the Corpus Hippocraticum (450–350 BC) [3]. -

Compression Garments – Why Bother? Prevention Maintenance of Current Limb Volume Healthier Cell Environment – Faster Nutrition In, Waste Out
Compression Garments – Why Bother? Prevention Maintenance of current limb volume Healthier cell environment – faster nutrition in, waste out. Slowed fluid exchange => altered cell functions, and stagnant environment ideal for bacterial party! (increased risk of opportunistic infection can further scar delicate lymphatics) Reduces risk of progressive swelling, hardness Why Bother? Provides measure of skin protection against various trauma Minimizes future complications when combined with other risk reduction practices Initial diligence and ongoing persistence => payoff of “garment free pass” for “special occasions” Gives YOU control over your LE NIH & NNMC STUDY 2001-2006 Followed n=196 newly dx BCRA pts Prior to surgery, then 3 mth intervals following surgery up to one year. Ave onset 6.9mths after surgery. Perometry identified sub-clinical LE in 43 pts (83ml or 3% volume change) Treated with ready made sleeve and gauntlet. Results within 4.4 wks, volume reduced ave of 48ml, ie ~50%. (almost to size of unaffected arm). Results maintained at 4.8mth follow-up Early intervention at this stage when LE is reversible, (lymph stasis is more fluid like rather than more viscous, no dermal changes) Stout et al 2011 (Am Jnl Phy Med Rehab) LE likely starts in subfascial layers, and by time lymphatic reflux affects skin lymphatics (in superficial fascia), LE well on way to Stage II, a less reversible stage which does not respond as quickly to simple sleeve compression Also noted - One of highest risk factors for developing LE is obesity. This may prevent some patients from using ready made garments because it is imperative that the sleeve fits the limb appropriately. -

Abdominal Contouring
Abdominal Contouring Contouring procedures for your tummy can involve liposuction, mini-tucks, and full abdominoplasties. Ideally, you should be near your ideal weight and exercise regularly. Sometimes your clothing will just not fit right because of your shape. You should not have any metabolic or eating disorders, or any problems with healing. Your specific goals will often determine which procedure is best for you. Medical reasons for a panniculectomy (removal of excess skin only) include inability to ambulate normally, chronic pains or ulcerations under the overhanging pannus (tummy), and chronic rashes or yeast infections where there is skin to skin contact. Documentation is required from your primary physician to obtain authorization. Liposuction is best for the individual with a strong abdominal wall, good skin tone, and simply an excess of fatty tissues. Full-term pregnancies will generally stretch your tummy muscles and skin, making liposuction less ideal. Liposuction depends on good skin tone to allow your skin to retract following removal of excess fat. Tumescent techniques, where high volumes of fluid with anesthetics are injected into the fat, are used minimizing blood loss and providing prolonged anesthesia following the procedure. Limited procedures may be done in the office under local anesthesia. However, extensive procedures or those with low pain tolerances should be done in an operating room where IV sedation or a general anesthetic is available. This does increase the cost of the procedure but is usually well worth it in terms of comfort. Liposuction requires the use of a compression garment or girdle like garment following the procedure and this is worn 24/7 for a minimum of 3 weeks or longer, depending on your bruising. -

Student Policy Manual
STUDENT POLICY MANUAL ASSOCIATE DEGREE NURSING 2019-20 1 TABLE OF CONTENTS General Program Requirements/Information 3 Evaluation 4 Assessment Technology Institute (ATI) 5 Student Progression in the Nursing Program 6 Separation from the Nursing Program 7 Readmission to the Nursing Program 8 Acceptance of Transfer Students 9 Written Assignments/Electronic Equipment/Lab 10 Communication 11 Testing 12 Attendance 13 Nursing Student Dress Code 14 Student Code of Conduct and Expected Behaviors 15 Unsafe Nursing Practice 16 Appendices: A Nursing Program Curriculum Plan 17 B WPCC ADN Program Mission, Philosophy, 18-19 Conceptual Framework, Learning and Program Outcomes C Policy on Standard Precautions and Post-Body Fluid Exposure 20-23 Admission requirements for each year are available on the college web site www.wpcc.edu Published by the Nursing Program for information purposes and does not constitute a contract. The Nursing Program reserves the right to make changes in these policies. (adopted 6/09, reviewed and revised annually) 2 GENERAL PROGRAM REQUIREMENTS/INFORMATION The nursing program is accredited by ACEN, Accreditation Commission for Education in Nursing (ACEN), 3343 Peachtree Road NE, Suite 850, Atlanta, GA 30326, 404-975-5000 www.acenursing.org North Carolina law requires a nursing student to be physically and emotionally healthy in order to ensure safe care of clients. The determination that a student is healthy and can participate in clinical practice must be made by a licensed medical provider (physician, physician’s assistant, or nurse practitioner). A student is admitted conditionally until a completed physical appraisal form, including the statement verifying the student is able to perform clinical practice, and documentation of all required immunizations/tests are submitted to the Castlebranch portal. -

The 5Ps Model to Optimize Compression Athletic Wear Comfort in Sports
Journal of Fiber Bioengineering and Informatics Regular Article The 5Ps Model to Optimize Compression Athletic Wear Comfort in Sports Rong Liu*, Trevor Little College of Textiles, Campus Box 8301, North Carolina State University, Raleigh, NC 27695, USA Abstract: Engineered design of compression athletic wear has been selectively applied in various recognized Olympic sports and popular recreational activities. This recent development is, as one type of additional body-behavioural support, protection and adjustment, plays a crucial role, in improving the athletes’ performances. Typically, this is accomplished by providing engineered design support, pressure, and form-fit on targeted areas of athletes’ body. In the present paper, a contextual model including 5Ps (i.e. Physical, Psychological, Physiological, Psychophysical, and Psychophysiological properties) related to user comfort and performance, has been developed to analyze multiple relationships between the athlete, athletic wear, immediate body space and sports environment, which would help us understand the effects of athletic wear on sports performance. The 5Ps reference model explores the mechanisms of action of body-clothing-environment system from a comprehensive view, thus effectively optimizing functional design of compression athletic wear in practice to enhance sports achievement and comfort. Keywords: 5Ps model, compression, athletic wear, comfort, sports. 1. Introduction intimately maintain contact with human skin. The functional performance of athletic wear is largely Growing