Review of Calculus, Cont'd
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Directional Derivative the Derivative of a Real Valued Function (Scalar field) with Respect to a Vector
Math 253 The Directional Derivative The derivative of a real valued function (scalar field) with respect to a vector. f(x + h) f(x) What is the vector space analog to the usual derivative in one variable? f 0(x) = lim − ? h 0 h ! x -2 0 2 5 Suppose f is a real valued function (a mapping f : Rn R). ! (e.g. f(x; y) = x2 y2). − 0 Unlike the case with plane figures, functions grow in a variety of z ways at each point on a surface (or n{dimensional structure). We'll be interested in examining the way (f) changes as we move -5 from a point X~ to a nearby point in a particular direction. -2 0 y 2 Figure 1: f(x; y) = x2 y2 − The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . z -5 -2 0 y 2 Figure 2: f(x; y) = x2 y2 − y If we give the direction by using a second vector, say ~u, then for →u X→ + h any real number h, the vector X~ + h~u represents a change in X→ position from X~ along a line through X~ parallel to ~u. →u →u h x Figure 3: Change in position along line parallel to ~u The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . -

Cauchy Integral Theorem
Cauchy’s Theorems I Ang M.S. Augustin-Louis Cauchy October 26, 2012 1789 – 1857 References Murray R. Spiegel Complex V ariables with introduction to conformal mapping and its applications Dennis G. Zill , P. D. Shanahan A F irst Course in Complex Analysis with Applications J. H. Mathews , R. W. Howell Complex Analysis F or Mathematics and Engineerng 1 Summary • Cauchy Integral Theorem Let f be analytic in a simply connected domain D. If C is a simple closed contour that lies in D , and there is no singular point inside the contour, then ˆ f (z) dz = 0 C • Cauchy Integral Formula (For simple pole) If there is a singular point z0 inside the contour, then ˛ f(z) dz = 2πj f(z0) z − z0 • Generalized Cauchy Integral Formula (For pole with any order) ˛ f(z) 2πj (n−1) n dz = f (z0) (z − z0) (n − 1)! • Cauchy Inequality M · n! f (n)(z ) ≤ 0 rn • Gauss Mean Value Theorem ˆ 2π ( ) 1 jθ f(z0) = f z0 + re dθ 2π 0 1 2 Related Mathematics Review 2.1 Stoke’s Theorem ¨ ˛ r × F¯ · dS = F¯ · dr Σ @Σ (The proof is skipped) ¯ Consider F = (FX ;FY ;FZ ) 0 1 x^ y^ z^ B @ @ @ C r × F¯ = det B C @ @x @y @z A FX FY FZ Let FZ = 0 0 1 x^ y^ z^ B @ @ @ C r × F¯ = det B C @ @x @y @z A FX FY 0 dS =ndS ^ , for dS = dxdy , n^ =z ^ . By z^ · z^ = 1 , consider z^ component only for r × F¯ 0 1 x^ y^ z^ ( ) B @ @ @ C @F @F r × F¯ = det B C = Y − X z^ @ @x @y @z A @x @y FX FY 0 i.e. -

Selected Solutions to Assignment #1 (With Corrections)
Math 310 Numerical Analysis, Fall 2010 (Bueler) September 23, 2010 Selected Solutions to Assignment #1 (with corrections) 2. Because the functions are continuous on the given intervals, we show these equations have solutions by checking that the functions have opposite signs at the ends of the given intervals, and then by invoking the Intermediate Value Theorem (IVT). a. f(0:2) = −0:28399 and f(0:3) = 0:0066009. Because f(x) is continuous on [0:2; 0:3], and because f has different signs at the ends of this interval, by the IVT there is a solution c in [0:2; 0:3] so that f(c) = 0. Similarly, for [1:2; 1:3] we see f(1:2) = 0:15483; f(1:3) = −0:13225. And etc. b. Again the function is continuous. For [1; 2] we note f(1) = 1 and f(2) = −0:69315. By the IVT there is a c in (1; 2) so that f(c) = 0. For the interval [e; 4], f(e) = −0:48407 and f(4) = 2:6137. And etc. 3. One of my purposes in assigning these was that you should recall the Extreme Value Theorem. It guarantees that these problems have a solution, and it gives an algorithm for finding it. That is, \search among the critical points and the endpoints." a. The discontinuities of this rational function are where the denominator is zero. But the solutions of x2 − 2x = 0 are at x = 2 and x = 0, so the function is continuous on the interval [0:5; 1] of interest. -

1 Mean Value Theorem 1 1.1 Applications of the Mean Value Theorem
Seunghee Ye Ma 8: Week 5 Oct 28 Week 5 Summary In Section 1, we go over the Mean Value Theorem and its applications. In Section 2, we will recap what we have covered so far this term. Topics Page 1 Mean Value Theorem 1 1.1 Applications of the Mean Value Theorem . .1 2 Midterm Review 5 2.1 Proof Techniques . .5 2.2 Sequences . .6 2.3 Series . .7 2.4 Continuity and Differentiability of Functions . .9 1 Mean Value Theorem The Mean Value Theorem is the following result: Theorem 1.1 (Mean Value Theorem). Let f be a continuous function on [a; b], which is differentiable on (a; b). Then, there exists some value c 2 (a; b) such that f(b) − f(a) f 0(c) = b − a Intuitively, the Mean Value Theorem is quite trivial. Say we want to drive to San Francisco, which is 380 miles from Caltech according to Google Map. If we start driving at 8am and arrive at 12pm, we know that we were driving over the speed limit at least once during the drive. This is exactly what the Mean Value Theorem tells us. Since the distance travelled is a continuous function of time, we know that there is a point in time when our speed was ≥ 380=4 >>> speed limit. As we can see from this example, the Mean Value Theorem is usually not a tough theorem to understand. The tricky thing is realizing when you should try to use it. Roughly speaking, we use the Mean Value Theorem when we want to turn the information about a function into information about its derivative, or vice-versa. -
2.4 the Extreme Value Theorem and Some of Its Consequences
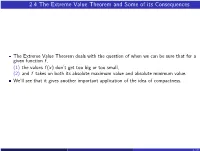
2.4 The Extreme Value Theorem and Some of its Consequences The Extreme Value Theorem deals with the question of when we can be sure that for a given function f , (1) the values f (x) don’t get too big or too small, (2) and f takes on both its absolute maximum value and absolute minimum value. We’ll see that it gives another important application of the idea of compactness. 1 / 17 Definition A real-valued function f is called bounded if the following holds: (∃m, M ∈ R)(∀x ∈ Df )[m ≤ f (x) ≤ M]. If in the above definition we only require the existence of M then we say f is upper bounded; and if we only require the existence of m then say that f is lower bounded. 2 / 17 Exercise Phrase boundedness using the terms supremum and infimum, that is, try to complete the sentences “f is upper bounded if and only if ...... ” “f is lower bounded if and only if ...... ” “f is bounded if and only if ...... ” using the words supremum and infimum somehow. 3 / 17 Some examples Exercise Give some examples (in pictures) of functions which illustrates various things: a) A function can be continuous but not bounded. b) A function can be continuous, but might not take on its supremum value, or not take on its infimum value. c) A function can be continuous, and does take on both its supremum value and its infimum value. d) A function can be discontinuous, but bounded. e) A function can be discontinuous on a closed bounded interval, and not take on its supremum or its infimum value. -

MATH 25B Professor: Bena Tshishiku Michele Tienni Lowell House
MATH 25B Professor: Bena Tshishiku Michele Tienni Lowell House Cambridge, MA 02138 [email protected] Please note that these notes are not official and they are not to be considered as a sub- stitute for your notes. Specifically, you should not cite these notes in any of the work submitted for the class (problem sets, exams). The author does not guarantee the accu- racy of the content of this document. If you find a typo (which will probably happen) feel free to email me. Contents 1. January 225 1.1. Functions5 1.2. Limits6 2. January 247 2.1. Theorems about limits7 2.2. Continuity8 3. January 26 10 3.1. Continuity theorems 10 4. January 29 – Notes by Kim 12 4.1. Least Upper Bound property (the secret sauce of R) 12 4.2. Proof of the intermediate value theorem 13 4.3. Proof of the boundedness theorem 13 5. January 31 – Notes by Natalia 14 5.1. Generalizing the boundedness theorem 14 5.2. Subsets of Rn 14 5.3. Compactness 15 6. February 2 16 6.1. Onion ring theorem 16 6.2. Proof of Theorem 6.5 17 6.3. Compactness of closed rectangles 17 6.4. Further applications of compactness 17 7. February 5 19 7.1. Derivatives 19 7.2. Computing derivatives 20 8. February 7 22 8.1. Chain rule 22 Date: April 25, 2018. 1 8.2. Meaning of f 0 23 9. February 9 25 9.1. Polynomial approximation 25 9.2. Derivative magic wands 26 9.3. Taylor’s Theorem 27 9.4. -

The Mean Value Theorem) – Be Able to Precisely State the Mean Value Theorem and Rolle’S Theorem
Math 220 { Test 3 Information The test will be given during your lecture period on Wednesday (April 27, 2016). No books, notes, scratch paper, calculators or other electronic devices are allowed. Bring a Student ID. It may be helpful to look at • http://www.math.illinois.edu/~murphyrf/teaching/M220-S2016/ { Volumes worksheet, quizzes 8, 9, 10, 11 and 12, and Daily Assignments for a summary of each lecture • https://compass2g.illinois.edu/ { Homework solutions • http://www.math.illinois.edu/~murphyrf/teaching/M220/ { Tests and quizzes in my previous courses • Section 3.10 (Linear Approximation and Differentials) { Be able to use a tangent line (or differentials) in order to approximate the value of a function near the point of tangency. • Section 4.2 (The Mean Value Theorem) { Be able to precisely state The Mean Value Theorem and Rolle's Theorem. { Be able to decide when functions satisfy the conditions of these theorems. If a function does satisfy the conditions, then be able to find the value of c guaranteed by the theorems. { Be able to use The Mean Value Theorem, Rolle's Theorem, or earlier important the- orems such as The Intermediate Value Theorem to prove some other fact. In the homework these often involved roots, solutions, x-intercepts, or intersection points. • Section 4.8 (Newton's Method) { Understand the graphical basis for Newton's Method (that is, use the point where the tangent line crosses the x-axis as your next estimate for a root of a function). { Be able to apply Newton's Method to approximate roots, solutions, x-intercepts, or intersection points. -

Two Fundamental Theorems About the Definite Integral
Two Fundamental Theorems about the Definite Integral These lecture notes develop the theorem Stewart calls The Fundamental Theorem of Calculus in section 5.3. The approach I use is slightly different than that used by Stewart, but is based on the same fundamental ideas. 1 The definite integral Recall that the expression b f(x) dx ∫a is called the definite integral of f(x) over the interval [a,b] and stands for the area underneath the curve y = f(x) over the interval [a,b] (with the understanding that areas above the x-axis are considered positive and the areas beneath the axis are considered negative). In today's lecture I am going to prove an important connection between the definite integral and the derivative and use that connection to compute the definite integral. The result that I am eventually going to prove sits at the end of a chain of earlier definitions and intermediate results. 2 Some important facts about continuous functions The first intermediate result we are going to have to prove along the way depends on some definitions and theorems concerning continuous functions. Here are those definitions and theorems. The definition of continuity A function f(x) is continuous at a point x = a if the following hold 1. f(a) exists 2. lim f(x) exists xœa 3. lim f(x) = f(a) xœa 1 A function f(x) is continuous in an interval [a,b] if it is continuous at every point in that interval. The extreme value theorem Let f(x) be a continuous function in an interval [a,b]. -

Chapter 12 Applications of the Derivative
Chapter 12 Applications of the Derivative Now you must start simplifying all your derivatives. The rule is, if you need to use it, you must simplify it. 12.1 Maxima and Minima Relative Extrema: f has a relative maximum at c if there is some interval (r, s) (even a very small one) containing c for which f(c) ≥ f(x) for all x between r and s for which f(x) is defined. f has a relative minimum at c if there is some interval (r, s) (even a very small one) containing c for which f(c) ≤ f(x) for all x between r and s for which f(x) is defined. Absolute Extrema f has an absolute maximum at c if f(c) ≥ f(x) for every x in the domain of f. f has an absolute minimum at c if f(c) ≤ f(x) for every x in the domain of f. Extreme Value Theorem - If f is continuous on a closed interval [a,b], then it will have an absolute maximum and an absolute minimum value on that interval. Each absolute extremum must occur either at an endpoint or a critical point. Therefore, the absolute max is the largest value in a table of vales of f at the endpoints and critical points, and the absolute minimum is the smallest value. Locating Candidates for Relative Extrema If f is a real valued function, then its relative extrema occur among the following types of points, collectively called critical points: 1. Stationary Points: f has a stationary point at x if x is in the domain of f and f′(x) = 0. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

MA123, Chapter 6: Extreme Values, Mean Value
MA123, Chapter 6: Extreme values, Mean Value Theorem, Curve sketching, and Concavity • Apply the Extreme Value Theorem to find the global extrema for continuous func- Chapter Goals: tion on closed and bounded interval. • Understand the connection between critical points and localextremevalues. • Understand the relationship between the sign of the derivative and the intervals on which a function is increasing and on which it is decreasing. • Understand the statement and consequences of the Mean Value Theorem. • Understand how the derivative can help you sketch the graph ofafunction. • Understand how to use the derivative to find the global extremevalues (if any) of a continuous function over an unbounded interval. • Understand the connection between the sign of the second derivative of a function and the concavities of the graph of the function. • Understand the meaning of inflection points and how to locate them. Assignments: Assignment 12 Assignment 13 Assignment 14 Assignment 15 Finding the largest profit, or the smallest possible cost, or the shortest possible time for performing a given procedure or task, or figuring out how to perform a task most productively under a given budget and time schedule are some examples of practical real-world applications of Calculus. The basic mathematical question underlying such applied problems is how to find (if they exist)thelargestorsmallestvaluesofagivenfunction on a given interval. This procedure depends on the nature of the interval. ! Global (or absolute) extreme values: The largest value a function (possibly) attains on an interval is called its global (or absolute) maximum value.Thesmallestvalueafunction(possibly)attainsonan interval is called its global (or absolute) minimum value.Bothmaximumandminimumvalues(ifthey exist) are called global (or absolute) extreme values. -

OPTIMIZATION 1. Optimization and Derivatives
4: OPTIMIZATION STEVEN HEILMAN 1. Optimization and Derivatives Nothing takes place in the world whose meaning is not that of some maximum or minimum. Leonhard Euler At this stage, Euler's statement may seem to exaggerate, but perhaps the Exercises in Section 4 and the Problems in Section 5 may reinforce his views. These problems and exercises show that many physical phenomena can be explained by maximizing or minimizing some function. We therefore begin by discussing how to find the maxima and minima of a function. In Section 2, we will see that the first and second derivatives of a function play a crucial role in identifying maxima and minima, and also in drawing functions. Finally, in Section 3, we will briefly describe a way to find the zeros of a general function. This procedure is known as Newton's Method. As we already see in Algorithm 1.2(1) below, finding the zeros of a general function is crucial within optimization. We now begin our discussion of optimization. We first recall the Extreme Value Theorem from the last set of notes. In Algorithm 1.2, we will then describe a general procedure for optimizing a function. Theorem 1.1. (Extreme Value Theorem) Let a < b. Let f :[a; b] ! R be a continuous function. Then f achieves its minimum and maximum values. More specifically, there exist c; d 2 [a; b] such that: for all x 2 [a; b], f(c) ≤ f(x) ≤ f(d). Algorithm 1.2. A procedure for finding the extreme values of a differentiable function f :[a; b] ! R.