NSI Industrial Trackballs Catalog
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Remote Control (RC) Monitor Electrical Controls Supplemental Instructions for Use with RC Monitor Manual
MANUAL: Remote Control (RC) Monitor Electrical Controls Supplemental Instructions for use with RC Monitor Manual INSTRUCTIONS FOR INSTALLATION, SAFE OPERATION AND MAINTENANCE Understand manual before use. Operation of this device without understanding the manual and DANGER receiving proper training is a misuse of this equipment. Obtain safety information at www.tft. com/serial-number SECTION 3.0 SECTION 4.9 General Information and Specifications Toggle Switch Monitor Operator Station SECTION 4.0 (Y4E-TS) Electrical Controls Installation and Operation SECTION 4.10 SECTION 4.1 Monitor Communication Monitor Mounted Interface Control Operator Station (Y4E-COMM) SECTION 4.2 SECTION 4.11 Panel Mount Monitor Position Display Operator Station (Y4E-DISP) (Y4E-RP) SECTION 4.12 SECTION 4.3 Remote Auxiliary Function Panel Mount With Display Interface Control Operator Station (YE-REMAUX) (Y4E-RP-D) SECTION 4.4 SECTION 4.13 Tethered Electric RC Monitor Aerial Operator Station Truck Installation (Y4E-CT-##) SECTION 4.14 SECTION 4.5 Multiplex Interface Control (YE-CAN#) Tethered Operator Station With Display (Y4E-CT-##-D) SECTION 4.15 Ethernet Interface Control SECTION 4.6 Wireless Operator Station (YE-RF-##) SECTION 4.16 Electric Nozzle Actuator SECTION 4.7 Wireless Operator Station With Display (YE-RF-##-D) SECTION 4.17 Valve Kits SECTION 4.8 (YE-VK-PH) Joystick Operator Station SECTION 5.0 (Y4E-JS) Troubleshooting TASK FORCE TIPS LLC 3701 Innovation Way, IN 46383-9327 USA MADE IN USA • tft.com 800-348-2686 • 219-462-6161 • Fax 219-464-7155 ©Copyright Task Force Tips LLC 2008-2018 LIY-500 November 21, 2018 Rev13 DANGER PERSONAL RESPONSIBILITY CODE The member companies of FEMSA that provide emergency response equipment and services want responders to know and understand the following: 1. -

Evaluating the Effect of Four Different Pointing Device Designs on Upper Extremity Posture and Muscle Activity During Mousing Tasks
Applied Ergonomics 47 (2015) 259e264 Contents lists available at ScienceDirect Applied Ergonomics journal homepage: www.elsevier.com/locate/apergo Evaluating the effect of four different pointing device designs on upper extremity posture and muscle activity during mousing tasks * Michael Y.C. Lin a, Justin G. Young b, Jack T. Dennerlein a, c, a Department of Environmental Health, Harvard School of Public Health, 665 Huntington Avenue, Boston, MA 02115, USA b Department of Industrial & Manufacturing Engineering, Kettering University, 1700 University Avenue, Flint, MI 48504, USA c Department of Physical Therapy, Movements, and Rehabilitation Sciences, Bouve College of Health Sciences, Northeastern University, 360 Huntington Avenue, Boston, MA 02115, USA article info abstract Article history: The goal of this study was to evaluate the effect of different types of computer pointing devices and Received 10 January 2014 placements on posture and muscle activity of the hand and arm. A repeated measures laboratory study Accepted 3 October 2014 with 12 adults (6 females, 6 males) was conducted. Participants completed two mouse-intensive tasks Available online while using a conventional mouse, a trackball, a stand-alone touchpad, and a rollermouse. A motion analysis system and an electromyography system monitored right upper extremity postures and muscle Keywords: activity, respectively. The rollermouse condition was associated with a more neutral hand posture (lower Pointing device inter-fingertip spread and greater finger flexion) along with significantly lower forearm extensor muscle Computer tasks fi Musculoskeletal disorders activity. The touchpad and rollermouse, which were centrally located, were associated with signi cantly more neutral shoulder postures, reduced ulnar deviation, and lower forearm extensor muscle activities than other types of pointing devices. -

Robot Explorer Program Manual
25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 i90 Robot Explorer Program Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 1 - Copyright Statement This manual or any portion of it may not be copied or duplicated without the expressed written consent of Dr Robot. All the software, firmware, hardware and product design accompanying with Dr Robot’s product are solely owned and copyrighted by Dr Robot. End users are authorized to use for personal research and educational use only. Duplication, distribution, reverse-engineering, or commercial application of the Dr Robot or licensed software and hardware without the expressed written consent of Dr Robot is explicitly forbidden. Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 2 - Table of Contents I. Introduction 4 II. System Requirements 4 III. Software Installation 5 Installing the i90 Robot Explorer Programs 5 Install the Joystick Controller 5 IV. Robot Operations 6 Using the Joystick Controls 6 Controlling Camera 7 Driving the Robot 7 Using i90 Robot Explorer Program Control 8 Video display 8 Operation Option 9 Utility Panel 17 Robot & Map Display 18 Robot Status 19 Using i90 Robot Explorer Client Program Control 20 Video 21 Robot & Map Display 21 Camera Operation 21 Robot Operation 21 Robot Data Display 21 Copyright © 2006, Dr Robot Inc. All Rights Reserved. www.DrRobot.com - 3 - I. Introduction This manual will provide you information on using the i90 Robot Explorer program to operate the robot. Please refer to the i90 Quick Guide regarding other documents related to i90. -

ACCESSORIES for PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control
ACCESSORIES FOR PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control Tokyo, October 3, 2006 – Sony Computer Entertainment Inc. (SCEI) today announced that Wireless Controller (SIXAXIS™) and Memory Card Adaptor would become available simultaneously with the launch of PLAYSTATION®3 (PS3) computer entertainment system on November 11th, 2006, in Japan, at a recommended retail price of 5,000 yen (tax included) and 1,500 yen (tax included) respectively. BD Remote Control will also become available on December 7th 2006, at a recommended retail price of 3,600 yen (tax included). Wireless Controller (SIXAXIS) for PS3 employs a high-precision, highly sensitive six-axis sensing system, which detects natural and intuitive movements of hands for real-time interactive play. With the adoption of Bluetooth® wireless technology, it allows up to 7 players to play at the same time, without having to attach any other external device such as a multitap. In addition, by simply plugging a USB cable to the controller, users can seamlessly switch from wireless to wired connection and automatically charge its battery while the controller is in use. Controller battery lasts up to 30 hours when fully charged *1). The new Memory Card Adaptor enables users to transfer data saved on Memory Cards for PlayStation® and PlayStation®2 onto the hard disk drive of PS3. To transfer data, users need to simply insert their Memory Cards to the Memory Card Adaptor connected to PS3 via a USB port. In December, BD Remote Control will also become available, which enables users to easily operate movies and music content on BD (Blu-ray Disc) and DVD on PS3. -

Chapter 9. Input Devices
Table of contents 9 Input devices .................................................................................................................9-1 9.1 Keyboards ............................................................................................................. 9-4 9.2 Fixed-function keys .............................................................................................. 9-6 9.3 Pointing devices.................................................................................................... 9-7 9.3.1 General........................................................................................................... 9-7 9.3.2 Mouse ............................................................................................................ 9-9 9.3.3 Joystick and trackball .................................................................................. 9-10 9.3.3.1 General..................................................................................................9-10 9.3.3.2 Hand-operated displacement joysticks .................................................9-10 9.3.3.3 Finger-operated displacement joysticks................................................9-11 9.3.3.4 Thumb tip and fingertip-operated displacement joysticks....................9-13 9.3.3.5 Hand-operated isometric joysticks........................................................9-13 9.3.3.6 Thumb tip and fingertip-operated isometric joysticks..........................9-14 9.3.3.7 Ball controls..........................................................................................9-14 -

Computer and Its Components Theory : 05 Marks Textbook Questions A
Computer and Its Components Theory : 05 Marks Textbook Questions A. Multiple choice questions 1. The collection of unprocessed facts, figures and symbols is known as ____________. (a) Information (b) Software (c) Data and Information (d) None of the above Ans. (d) None of the above as the correct answer is data 2. ______________ is the processed form of data which is organized meaningful and useful. (a) Information (b) Software (c) Data (d) None of the above Ans. (a) Information 3. Hardware is any part of the computer that has a physical structure that can be seen and touched. (a) True (b) False (c) Not sure (d) None of the above Ans. (a) True 4. Components of computer hardware are ____________________________. (a) Input devices and output devices (b) A system unit and storage devices (c) Communication devices (d) All of the above Ans. (d) All of the above 5. __________ devices accept data and instructions from the user. (a) Output (b) Input (c) Components of hardware (d) Storage Ans. (b) Input 6. Which disk is made up of a circular thin plastic jacket coated with magnetic material? (a) Hard Disk (b) Compact Disk (c) DVD (d) Floppy Disk Ans. (d) Floppy Disk 7. ___________ disks are used to store more than 25 GB of data with a very high speed in less amount of time. (a) Digital Versatile (b) Compact (c) Blue‐Ray (d) None of the above Ans. (c) Blue‐Ray 8. Random Access Memory and Read Only Memory are examples of _______________. (a) Primary Memory (b) Secondary Memory (c) Auxiliary Memory (d) Both primary and secondary memory Ans. -

Control Surface: Electrical Physical Displays Dmx
Technical Data Sheet ELECTRICAL Voltage: 100-240VAC, 50 / 60Hz Max Current: 5A Mains Connector: IEC 320 PHYSICAL Weight: 21 lbs (9.52kg) Dimensions: 19.09” (485.03mm) wide 16.59” (421.5mm) deep 5.21” (132.36mm) high DISPLAYS Support for one monitor / touchscreen: DVI-D or VGA (only connection will work at a time) • DVI-D supports digital video connection only • Rack Hog 4 Lighting Control Console DVI-to-VGA adapter will not work on DVI port • VGA monitor compatibility not guaranteed • Operating System: Hog 4 OS (see Hog4OS manual for list of supported touchscreens) • Built in DMX Processor 8000 • USB Recovery Flash Drive Included DMX / ARTNET / SCAN • USB Flash Drive for Show file storage included Local Output Processing: 16 universes (8,192 ch) • Light Converse Visualizer dongle included Local DMX Outputs: 8 x Neutrik 5-pin female XLR Expansion via external DP8000s: Yes, Unlimited I/O CONNECTIVITY USB 2.0 Ports: 2 rear / 2 front HogNet: Yes (allows connectivity to consoles / DPs) FixtureNet: Yes (Art-Net, sACN, Visualizer connect) Onboard MIDI: In/Out/Thru CONTROL SURFACE: (supports MIDI Show Control, MIDI Timecode, and MIDI Notes) KeyBoard: Support for external USB keyboard Onboard LTC: Input via 3-pin XLR Trackball: Support for external USB trackball/mouse Visualizer connectivity: FixtureNet / Art-Net / sACN Ventlight: Yes, blue front vent light when unit is powered on (list of supported visualizers in Hog 4 OS help manual) Supported External Control Surfaces via USB: Remote Focus: Yes, via Open Sound Control • Hoglet 4 • NanoHog 4 • Playback Wing 4 • Master Wing 4 COMPUTER • MiniWing 4 Motherboard: Advantech AIMB-581 • Hog 3 Playback Wing Memory: 8 GB • Hog 3 Programming Wing Internal Hard Drive: 128 GB SSD • Hog 3 X-Wing Internal CD-R/DVD-ROM: No 2105 Gracy Farms Lane All specifications subject to change without notice Austin, TX 78758 DRAFTwww.highend.com 512.836.2242. -

The Trackball Controller: Improving the Analog Stick
The Trackball Controller: Improving the Analog Stick Daniel Natapov I. Scott MacKenzie Department of Computer Science and Engineering York University, Toronto, Canada {dnatapov, mack}@cse.yorku.ca ABSTRACT number of inputs was sufficient. Despite many future additions Two groups of participants (novice and advanced) completed a and improvements, the D-Pad persists on all standard controllers study comparing a prototype game controller to a standard game for all consoles introduced after the NES. controller for point-select tasks. The prototype game controller Shortcomings of the D-Pad became apparent with the introduction replaces the right analog stick of a standard game controller (used of 3D games. The Sony PlayStation and the Sega Saturn, for pointing and camera control) with a trackball. We used Fitts’ introduced in 1995, supported 3D environments and third-person law as per ISO 9241-9 to evaluate the pointing performance of perspectives. The controllers for those consoles, which used D- both controllers. In the novice group, the trackball controller’s Pads, were not well suited for 3D, since navigation was difficult. throughput was 2.69 bps – 60.1% higher than the 1.68 bps The main issue was that game characters could only move in eight observed for the standard controller. In the advanced group the directions using the D-Pad. To overcome this, some games, such trackball controller’s throughput was 3.19 bps – 58.7% higher than the 2.01 bps observed for the standard controller. Although as Resident Evil, used the forward and back directions of the D- the trackball controller performed better in terms of throughput, Pad to move the character, and the left and right directions for pointer path was more direct with the standard controller. -

Immersive Robotic Telepresence for Remote Educational Scenarios
sustainability Article Immersive Robotic Telepresence for Remote Educational Scenarios Jean Botev 1,* and Francisco J. Rodríguez Lera 2 1 Department of Computer Science, University of Luxembourg, L-4364 Esch-sur-Alzette, Luxembourg 2 Department of Mechanical, Informatics and Aerospace Engineering, University of León, 24071 León, Spain; [email protected] * Correspondence: [email protected] Abstract: Social robots have an enormous potential for educational applications and allow for cognitive outcomes that are similar to those with human involvement. Remotely controlling a social robot to interact with students and peers in an immersive fashion opens up new possibilities for instructors and learners alike. Using immersive approaches can promote engagement and have beneficial effects on remote lesson delivery and participation. However, the performance and power consumption associated with the involved devices are often not sufficiently contemplated, despite being particularly important in light of sustainability considerations. The contributions of this research are thus twofold. On the one hand, we present telepresence solutions for a social robot’s location-independent operation using (a) a virtual reality headset with controllers and (b) a mobile augmented reality application. On the other hand, we perform a thorough analysis of their power consumption and system performance, discussing the impact of employing the various technologies. Using the QTrobot as a platform, direct and immersive control via different interaction modes, including motion, emotion, and voice output, is possible. By not focusing on individual subsystems or motor chains, but the cumulative Citation: Botev, J.; Rodríguez Lera, energy consumption of an unaltered robot performing remote tasks, this research provides orientation F.J. Immersive Robotic Telepresence regarding the actual cost of deploying immersive robotic telepresence solutions. -
Remote Control Buttons in This Exercise You Will: 1
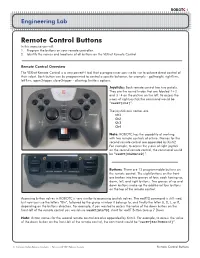
ROBOTC 1 Engineering Lab Remote Control Buttons In this exercise you will: 1. Program the buttons on your remote controller. 2. Identify the names and locations of all buttons on the VEXnet Remote Control. Remote Control Overview The VEXnet Remote Control is a very powerful tool that a programmer can use to use to achieve direct control of their robot. Each button can be programmed to control a specific behavior, for example - goStraight, rightTurn, leftTurn, openGripper, closeGripper - allowing limitless options. Joysticks: Each remote control has two josticks. They are the round knobs that are labeled 1+2 and 3+4 on the picture on the left. To access the y-axis of right joystick the command would be “vexRT[Ch2]”. The joystick axis names are: Ch1 Ch2 Ch3 Ch4 Note: ROBOTC has the capability of working with two remote controls at a time. Names for the second remote control are appended by Xmtr2. For example, to access the y-axis of right joystick on the second remote control, the command would be “vexRT[Ch2Xmtr2]”. Buttons: There are 12 programmable buttons on the remote control. The eight buttons on the front are broken into two groups of four, each having up, down, left, and right buttons. Two groups of up and down buttons make up the additional four buttons on the top of the remote control. Accessing button values in ROBOTC is very similar to accessing joystick values. The vexRT[] command is still used, but now you use the letters “Btn”, followed by the group number it belongs to, and finally the letter U, D, L, or R, depending on the buttons direction. -

Chapter 3 Input Devices
CSCA0201 FUNDAMENTALS OF COMPUTING Chapter 3 Input Devices 1 Input Devices Topics: • Input Devices • Examples of Input Device • Keyboard • Pointing Devices • Graphic and Video Input Devices • Audio Input Devices 2 Input Devices Input Devices • Any peripheral (piece of computer hardware equipment) used to provide data and control signals to a computer. • Allows the user to put data into the computer. • Without any input devices, a computer would only be a display device and not allow users to interact with it. 3 Input Devices Examples of Input Device • Keyboard • Mouse • Touchscreen • Graphic tablet • Microphone • Scanner 4 Input Devices Keyboard • One of the primary input devices used with a computer. • The keyboard looks very similar to the keyboards of electric typewriters, with some additional keys. • Keyboards allow a computer user to input letters, numbers, and other symbols into a computer • Uses an arrangement of buttons or keys. • Requires pressing and holding several keys simultaneously or in sequence. 5 Input Devices Keyboard 6 Input Devices Types of Keyboard • Standard • Laptop • Gaming and Multimedia • Thumb-sized • Virtual • Foldable 7 Input Devices Types of Keyboard Standard • Desktop computer keyboards, such as the 101-key US traditional keyboards or the 104-key Windows keyboards, include alphabetic characters, punctuation symbols, numbers and a variety of function keys. 8 Input Devices Types of Keyboard Laptop Keyboard • The laptop computer keyboard is a small version of the typical QWERTY keyboard. • A typical laptop has the same keyboard type as a normal keyboard, except for the fact that most laptop keyboards condense the symbols into fewer buttons to accommodate less space. -

Advanced Remote Control for Pc Using Smartphone
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 3 Issue 3, March - 2014 Advanced Remote Control For Pc Using Smartphone Rubinder Singh Nitin Kumar Bisret Narula Dept. of Information Technology Dept. of Information Technology Assi stant Professor G.T.B.I.T G.T.B.I.T G.T.B.I.T New Delhi, India New Delhi, India New Delhi, India Abstract—The Smartphone and Tablets have arisen as The aim is to make more efficient use of the android unique computational resource for many purposes. This paper Smartphone. As the android phones are very popular for their introduces a system by which a computer can be controlled rich features, this application gives advancement to those wirelessly through an android device. The aim is to transform a features. The application has many advance features like the Smartphone into a remote controller for the PC. Almost motion gaming feature to play game via remote. The everything on the computer could be controlled through phone from keyboard to mouse to specific applications like application converts the android device into a wireless racing PowerPoint, Media Players or even it can be used for the virtual wheel which will make the user to drive the vehicle in racing gaming as well. To send wireless signals Wi-Fi or Bluetooth games. Application uses the android Smartphone phone so no could be used which is already in the Smartphone. This paper separate hardware or device is needed to control the computer also represents a prototype application with a protocol and some system, the phone will be converted into a remote which make algorithms to show how the system can be implemented.