An Embedded Genus-One Helicoid
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia
Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia Brief information on some classes of the surfaces which cylinders, cones and ortoid ruled surfaces with a constant were not picked out into the special section in the encyclo- distribution parameter possess this property. Other properties pedia is presented at the part “Surfaces”, where rather known of these surfaces are considered as well. groups of the surfaces are given. It is known, that the Plücker conoid carries two-para- At this section, the less known surfaces are noted. For metrical family of ellipses. The straight lines, perpendicular some reason or other, the authors could not look through to the planes of these ellipses and passing through their some primary sources and that is why these surfaces were centers, form the right congruence which is an algebraic not included in the basic contents of the encyclopedia. In the congruence of the4th order of the 2nd class. This congru- basis contents of the book, the authors did not include the ence attracted attention of D. Palman [8] who studied its surfaces that are very interesting with mathematical point of properties. Taking into account, that on the Plücker conoid, view but having pure cognitive interest and imagined with ∞2 of conic cross-sections are disposed, O. Bottema [9] difficultly in real engineering and architectural structures. examined the congruence of the normals to the planes of Non-orientable surfaces may be represented as kinematics these conic cross-sections passed through their centers and surfaces with ruled or curvilinear generatrixes and may be prescribed a number of the properties of a congruence of given on a picture. -

Lord Kelvin's Error? an Investigation Into the Isotropic Helicoid
WesleyanUniversity PhysicsDepartment Lord Kelvin’s Error? An Investigation into the Isotropic Helicoid by Darci Collins Class of 2018 An honors thesis submitted to the faculty of Wesleyan University in partial fulfillment of the requirements for the Degree of Bachelor of Arts with Departmental Honors in Physics Middletown,Connecticut April,2018 Abstract In a publication in 1871, Lord Kelvin, a notable 19th century scientist, hypothesized the existence of an isotropic helicoid. He predicted that such a particle would be isotropic in drag and rotation translation coupling, and also have a handedness that causes it to rotate. Since this work was published, theorists have made predictions about the motion of isotropic helicoids in complex flows. Until now, no one has built such a particle or quantified its rotation translation coupling to confirm whether the particle has the properties that Lord Kelvin predicted. In this thesis, we show experimental, theoretical, and computational evidence that all conclude that Lord Kelvin’s geometry of an isotropic helicoid does not couple rotation and translation. Even in both the high and low Reynolds number regimes, Lord Kelvin’s model did not rotate through fluid. While it is possible there may be a chiral particle that is isotropic in drag and rotation translation coupling, this thesis presents compelling evidence that the geometry Lord Kelvin proposed is not one. Our evidence leads us to hypothesize that an isotropic helicoid does not exist. Contents 1 Introduction 2 1.1 What is an Isotropic Helicoid? . 2 1.1.1 Lord Kelvin’s Motivation . 3 1.1.2 Mentions of an Isotropic Helicoid in Literature . -
Minimal Surfaces Saint Michael’S College
MINIMAL SURFACES SAINT MICHAEL’S COLLEGE Maria Leuci Eric Parziale Mike Thompson Overview What is a minimal surface? Surface Area & Curvature History Mathematics Examples & Applications http://www.bugman123.com/MinimalSurfaces/Chen-Gackstatter-large.jpg What is a Minimal Surface? A surface with mean curvature of zero at all points Bounded VS Infinite A plane is the most trivial minimal http://commons.wikimedia.org/wiki/File:Costa's_Minimal_Surface.png surface Minimal Surface Area Cube side length 2 Volume enclosed= 8 Surface Area = 24 Sphere Volume enclosed = 8 r=1.24 Surface Area = 19.32 http://1.bp.blogspot.com/- fHajrxa3gE4/TdFRVtNB5XI/AAAAAAAAAAo/AAdIrxWhG7Y/s160 0/sphere+copy.jpg Curvature ~ rate of change More Curvature dT κ = ds Less Curvature History Joseph-Louis Lagrange first brought forward the idea in 1768 Monge (1776) discovered mean curvature must equal zero Leonhard Euler in 1774 and Jean Baptiste Meusiner in 1776 used Lagrange’s equation to find the first non- trivial minimal surface, the catenoid Jean Baptiste Meusiner in 1776 discovered the helicoid Later surfaces were discovered by mathematicians in the mid nineteenth century Soap Bubbles and Minimal Surfaces Principle of Least Energy A minimal surface is formed between the two boundaries. The sphere is not a minimal surface. http://arxiv.org/pdf/0711.3256.pdf Principal Curvatures Measures the amount that surfaces bend at a certain point Principal curvatures give the direction of the plane with the maximal and minimal curvatures http://upload.wikimedia.org/wi -

Bour's Theorem in 4-Dimensional Euclidean
Bull. Korean Math. Soc. 54 (2017), No. 6, pp. 2081{2089 https://doi.org/10.4134/BKMS.b160766 pISSN: 1015-8634 / eISSN: 2234-3016 BOUR'S THEOREM IN 4-DIMENSIONAL EUCLIDEAN SPACE Doan The Hieu and Nguyen Ngoc Thang Abstract. In this paper we generalize 3-dimensional Bour's Theorem 4 to the case of 4-dimension. We proved that a helicoidal surface in R 4 is isometric to a family of surfaces of revolution in R in such a way that helices on the helicoidal surface correspond to parallel circles on the surfaces of revolution. Moreover, if the surfaces are required further to have the same Gauss map, then they are hyperplanar and minimal. Parametrizations for such minimal surfaces are given explicitly. 1. Introduction Consider the deformation determined by a family of parametric surfaces given by Xθ(u; v) = (xθ(u; v); yθ(u; v); zθ(u; v)); xθ(u; v) = cos θ sinh v sin u + sin θ cosh v cos u; yθ(u; v) = − cos θ sinh v cos u + sin θ cosh v sin u; zθ(u; v) = u cos θ + v sin θ; where −π < u ≤ π; −∞ < v < 1 and the deformation parameter −π < θ ≤ π: A direct computation shows that all surfaces Xθ are minimal, have the same first fundamental form and normal vector field. We can see that X0 is the helicoid and Xπ=2 is the catenoid. Thus, locally the helicoid and catenoid are isometric and have the same Gauss map. Moreover, helices on the helicoid correspond to parallel circles on the catenoid. -
![[Math.DG] 12 Nov 1996 Le Osrcsa Constructs Elser H Ufc Noisl](https://docslib.b-cdn.net/cover/7373/math-dg-12-nov-1996-le-osrcsa-constructs-elser-h-ufc-noisl-1117373.webp)
[Math.DG] 12 Nov 1996 Le Osrcsa Constructs Elser H Ufc Noisl
Mixing Materials and Mathematics∗ David Hoffman † Mathematical Sciences Research Institute, Berkeley CA 94720 USA August 3, 2018 “Oil and water don’t mix” says the old saw. But a variety of immiscible liquids, in the presence of a soap or some other surfactant, can self-assemble into a rich variety of regular mesophases. Characterized by their “inter- material dividing surfaces”—where the different substances touch— these structures also occur in microphase-separated block copolymers. The un- derstanding of the interface is key to prediction of material properties, but at present the relationship between the curvature of the dividing surfaces and the relevant molecular and macromolecular physics is not well understood. Moreover, there is only a partial theoretical understanding of the range of possible periodic surfaces that might occur as interfaces. Here, differential geometry, the mathematics of curved surfaces and their generalizations, is playing an important role in the experimental physics of materials. “Curved surfaces and chemical structures,” a recent issue of the Philosophical Trans- actions of the Royal Society of London 1 provides a good sample of current work. In one article called “A cubic Archimedean screw,” 2 the physicist Veit Elser constructs a triply periodic surface with cubic symmetry. (This means that a unit translation in any one of the three coordinate directions moves the surface onto itself.) See Figure 1. The singularities of the surface are arXiv:math/9611213v1 [math.DG] 12 Nov 1996 ∗A version of this article will appear in NATURE, November 7, 1996, under the title “A new turn for Archimedes.” †Supported by research grant DE-FG03-95ER25250 of the Applied Mathematical Sci- ence subprogram of the Office of Energy Research, U.S. -

Complete Minimal Surfaces in R3
Publicacions Matem`atiques, Vol 43 (1999), 341–449. COMPLETE MINIMAL SURFACES IN R3 Francisco J. Lopez´ ∗ and Francisco Mart´ın∗ Abstract In this paper we review some topics on the theory of complete minimal surfaces in three dimensional Euclidean space. Contents 1. Introduction 344 1.1. Preliminaries .......................................... 346 1.1.1. Weierstrass representation .......................346 1.1.2. Minimal surfaces and symmetries ................349 1.1.3. Maximum principle for minimal surfaces .........349 1.1.4. Nonorientable minimal surfaces ..................350 1.1.5. Classical examples ...............................351 2. Construction of minimal surfaces with polygonal boundary 353 3. Gauss map of minimal surfaces 358 4. Complete minimal surfaces with bounded coordinate functions 364 5. Complete minimal surfaces with finite total curvature 367 5.1. Existence of minimal surfaces of least total curvature ...370 5.1.1. Chen and Gackstatter’s surface of genus one .....371 5.1.2. Chen and Gackstatter’s surface of genus two .....373 5.1.3. The surfaces of Espirito-Santo, Thayer and Sato..378 ∗Research partially supported by DGICYT grant number PB97-0785. 342 F. J. Lopez,´ F. Mart´ın 5.2. New families of examples...............................382 5.3. Nonorientable examples ................................388 5.3.1. Nonorientable minimal surfaces of least total curvature .......................................391 5.3.2. Highly symmetric nonorientable examples ........396 5.4. Uniqueness results for minimal surfaces of least total curvature ..............................................398 6. Properly embedded minimal surfaces 407 6.1. Examples with finite topology and more than one end ..408 6.1.1. Properly embedded minimal surfaces with three ends: Costa-Hoffman-Meeks and Hoffman-Meeks families..........................................409 6.1.2. -

Minimal Surfaces
Minimal Surfaces December 13, 2012 Alex Verzea 260324472 MATH 580: Partial Dierential Equations 1 Professor: Gantumur Tsogtgerel 1 Intuitively, a Minimal Surface is a surface that has minimal area, locally. First, we will give a mathematical denition of the minimal surface. Then, we shall give some examples of Minimal Surfaces to gain a mathematical under- standing of what they are and nally move on to a generalization of minimal surfaces, called Willmore Surfaces. The reason for this is that Willmore Surfaces are an active and important eld of study in Dierential Geometry. We will end with a presentation of the Willmore Conjecture, which has recently been proved and with some recent work done in this area. Until we get to Willmore Surfaces, we assume that we are in R3. Denition 1: The two Principal Curvatures, k1 & k2 at a point p 2 S, 3 S⊂ R are the eigenvalues of the shape operator at that point. In classical Dierential Geometry, k1 & k2 are the maximum and minimum of the Second Fundamental Form. The principal curvatures measure how the surface bends by dierent amounts in dierent directions at that point. Below is a saddle surface together with normal planes in the directions of principal curvatures. Denition 2: The Mean Curvature of a surface S is an extrinsic measure of curvature; it is the average of it's two principal curvatures: 1 . H ≡ 2 (k1 + k2) Denition 3: The Gaussian Curvature of a point on a surface S is an intrinsic measure of curvature; it is the product of the principal curvatures: of the given point. -

Blackfolds, Plane Waves and Minimal Surfaces
Blackfolds, Plane Waves and Minimal Surfaces Jay Armas1;2 and Matthias Blau2 1 Physique Th´eoriqueet Math´ematique Universit´eLibre de Bruxelles and International Solvay Institutes ULB-Campus Plaine CP231, B-1050 Brussels, Belgium 2 Albert Einstein Center for Fundamental Physics, University of Bern, Sidlerstrasse 5, 3012 Bern, Switzerland [email protected], [email protected] Abstract Minimal surfaces in Euclidean space provide examples of possible non-compact horizon ge- ometries and topologies in asymptotically flat space-time. On the other hand, the existence of limiting surfaces in the space-time provides a simple mechanism for making these configura- tions compact. Limiting surfaces appear naturally in a given space-time by making minimal surfaces rotate but they are also inherent to plane wave or de Sitter space-times in which case minimal surfaces can be static and compact. We use the blackfold approach in order to scan for possible black hole horizon geometries and topologies in asymptotically flat, plane wave and de Sitter space-times. In the process we uncover several new configurations, such as black arXiv:1503.08834v2 [hep-th] 6 Aug 2015 helicoids and catenoids, some of which have an asymptotically flat counterpart. In particular, we find that the ultraspinning regime of singly-spinning Myers-Perry black holes, described in terms of the simplest minimal surface (the plane), can be obtained as a limit of a black helicoid, suggesting that these two families of black holes are connected. We also show that minimal surfaces embedded in spheres rather than Euclidean space can be used to construct static compact horizons in asymptotically de Sitter space-times. -

Deformations of Triply Periodic Minimal Surfaces a Family of Gyroids
Deformations of Triply Periodic Minimal Surfaces A Family of Gyroids Adam G. Weyhaupt Department of Mathematics Indiana University Eastern Illinois University Colloquium Outline Minimal surfaces: definitions, examples, goal, and motivation Definitions and examples Goal and motivation The mathematical setting The Weierstraß Representation and Period Problem Cone metrics and the flat structures Sketch of the gyroid family Description of the P Surface Description of the gyroid Outline of Proof Homework Problems to Work On For More Information and Pictures Outline Minimal surfaces: definitions, examples, goal, and motivation Definitions and examples Goal and motivation The mathematical setting The Weierstraß Representation and Period Problem Cone metrics and the flat structures Sketch of the gyroid family Description of the P Surface Description of the gyroid Outline of Proof Homework Problems to Work On For More Information and Pictures Definition of a Minimal Surface Definition A minimal surface is a 2-dimensional surface in R3 with mean curvature H ≡ 0. Where does the name minimal come from? Let F : U ⊂ C → R3 parameterize a minimal surface; let d : U → R be smooth with compact support. Define a deformation of M by Fε : p 7→ F(p) + εd(p)N(p). d Area(Fε(U)) = 0 ⇐⇒ H ≡ 0 dε ε=0 Thus, “minimal surfaces” may really only be critical points for the area functional (but the name has stuck). Definition of a Minimal Surface Definition A minimal surface is a 2-dimensional surface in R3 with mean curvature H ≡ 0. Where does the name minimal come from? Let F : U ⊂ C → R3 parameterize a minimal surface; let d : U → R be smooth with compact support. -

Differential Geometry of Curves and Surfaces 8
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 8. Minimal Surfaces 8.1. Definition, Characterization, Examples. Figure 1. An example of a soap film (it looks very much like a M¨obius strip, but it’s not). Figure 2. Another soap film, which is a piece of the catenoid (the top and bottom frames are circles). Motivation. By dipping a wire frame into a soap solution and withdrawing it, we obtain a soap film: see Figures 1 and 2. Physical considerations (or just your intuition) are saying that this surface is “exactly the one which is bounded by the wire and whose area is minimal”. The quotation signs are due to the fact that the assertion is not completely true. There are two ways of expressing the assertion in a more precise way: (a) if we consider the function A which assigns to each surface bounded by the wire its area, then the soap film is a local minimum of A (like in Calculus I); by this we mean that if we deform the soap film slightly, the area will become larger. (b) if we isolate a “sufficiently” small piece of the surface, then any variation of that small piece results into an increase of the area. 1 2 In this chapter we will discuss about surfaces with property (b). Before getting further, it is worth looking at figure 3 and try to understand the idea of the rigorous definition which will come shortly. Figure 3. Understanding point (b) from above: Fix a “sufficiently” small contour on the surface; you are al- lowed to deform the surface, but only inside the contour; this should result in an increase of the area of the surface. -
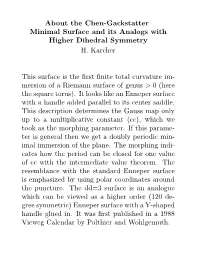
About the Chen-Gackstatter Minimal Surface and Its Analogs with Higher Dihedral Symmetry H
About the Chen-Gackstatter Minimal Surface and its Analogs with Higher Dihedral Symmetry H. Karcher This surface is the first finite total curvature im- mersion of a Riemann surface of genus > 0 (here the square torus). It looks like an Enneper surface with a handle added parallel to its center saddle. This description determines the Gauss map only up to a multiplicative constant (cc), which we took as the morphing parameter. If this parame- ter is general then we get a doubly periodic min- imal immersion of the plane. The morphing indi- cates how the period can be closed for one value of cc with the intermediate value theorem. The resemblance with the standard Enneper surface is emphasized by using polar coordinates around the puncture. The dd=3 surface is an analogue which can be viewed as a higher order (120 de- gree symmetric) Enneper surface with a Y-shaped handle glued in. It was first published in a 1988 Vieweg Calendar by Polthier and Wohlgemuth. Formulas are from: H. Karcher, Construction of minimal surfaces, in “Surveys in Geometry”, Univ. of Tokyo, 1989, and Lecture Notes No. 12, SFB 256, Bonn, 1989, pp. 1–96. For a discussion of techniques for creating mini- mal surfaces with various qualitative features by appropriate choices of Weierstrass data, see either [KWH], or pages 192–217 of [DHKW]. [KWH] H. Karcher, F. Wei, and D. Hoffman, The genus one helicoid, and the minimal surfaces that led to its discovery, in “Global Analysis in Modern Mathematics, A Symposium in Honor of Richard Palais’ Sixtieth Birthday”, K. -

Lecture Notes on Minimal Surfaces
Lecture Notes on Minimal Surfaces Emma Carberry, Kai Fung, David Glasser, Michael Nagle, Nizam Ordulu February 17, 2005 Contents 1 Introduction 9 2 A Review on Differentiation 11 2.1 Differentiation........................... 11 2.2 Properties of Derivatives . 13 2.3 Partial Derivatives . 16 2.4 Derivatives............................. 17 3 Inverse Function Theorem 19 3.1 Partial Derivatives . 19 3.2 Derivatives............................. 20 3.3 The Inverse Function Theorem . 22 4 Implicit Function Theorem 23 4.1 ImplicitFunctions. 23 4.2 ParametricSurfaces. 24 5 First Fundamental Form 27 5.1 TangentPlanes .......................... 27 5.2 TheFirstFundamentalForm . 28 5.3 Area ................................ 29 5 6 Curves 33 6.1 Curves as a map from R to Rn .................. 33 6.2 ArcLengthandCurvature . 34 7 Tangent Planes 37 7.1 Tangent Planes; Differentials of Maps Between Surfaces . 37 7.1.1 Tangent Planes . 37 7.1.2 Coordinates of w T (S) in the Basis Associated to ∈ p Parameterization x .................... 38 7.1.3 Differential of a (Differentiable) Map Between Surfaces 39 7.1.4 Inverse Function Theorem . 42 7.2 TheGeometryofGaussMap . 42 7.2.1 Orientation of Surfaces . 42 7.2.2 GaussMap ........................ 43 7.2.3 Self-Adjoint Linear Maps and Quadratic Forms . 45 8 Gauss Map I 49 8.1 “Curvature”ofaSurface . 49 8.2 GaussMap ............................ 51 9 Gauss Map II 53 9.1 Mean and Gaussian Curvatures of Surfaces in R3 ....... 53 9.2 GaussMapinLocalCoordinates . 57 10 Introduction to Minimal Surfaces I 59 10.1 Calculating the Gauss Map using Coordinates . 59 10.2 MinimalSurfaces . 61 11 Introduction to Minimal Surface II 63 11.1 Why a Minimal Surface is Minimal (or Critical) .