Gaspex Version 5.3.0 Reference Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tecplot 360 Data Format Guide
Data Format Guide Tecplot, Inc. Bellevue, WA 2008 COPYRIGHT NOTICE Tecplot 360TM Data Format Guide is for use with Tecplot 360TM Version 2008. Copyright © 1988-2008 Tecplot, Inc. All rights reserved worldwide. Except for personal use, this manual may not be reproduced, transmitted, transcribed, stored in a retrieval system, or translated in any form, in whole or in part, without the express written permission of Tecplot, Inc., 3535 Factoria Blvd, Ste. 550; Bellevue, WA 98006 U.S.A. The software discussed in this documentation and the documentation itself are furnished under license for utilization and duplication only according to the license terms. The copyright for the software is held by Tecplot, Inc. Documentation is provided for information only. It is subject to change without notice. It should not be interpreted as a commitment by Tecplot, Inc. Tecplot, Inc. assumes no liability or responsibility for documentation errors or inaccuracies. Tecplot, Inc. Post Office Box 52708 Bellevue, WA 98015-2708 U.S.A. Tel:1.800.763.7005 (within the U.S. or Canada), 00 1 (425)653-1200 (internationally) email: [email protected], [email protected] Questions, comments or concerns regarding this document: [email protected] For more information, visit http://www.tecplot.com THIRD PARTY SOFTWARE COPYRIGHT NOTICES SciPy © 2001-2002 Enthought. Inc. All Rights Reserved. NumPy © 2005 NumPy Developers. All Rights Reserved. VisTools and VdmTools © 1992-2007 Visual Kinematics, Inc. All Rights Reserved. NCSA HDF & HDF5 (Hierarchical Data Format) Software Library and Utilities © 1988-2004 The Board of Trustees of the University of Illinois. Contributors: National Center for Supercomputing Applications (NCSA) at the University of Illinois at Urbana-Champaign (UIUC), Lawrence Livermore National Laboratory (LLNL), Sandia National Laboratories (SNL), Los Alamos National Laboratory (LANL), Jean-l All Rights Reserved. -
Worksoft Certify Installation Guide
Installation Guide Worksoft Certify® Worksoft, Inc. · 15851 Dallas Parkway, Suite 855 · Addison, TX 75001 www.worksoft.com · 866-836-1773 Worksoft Certify Installation Guide Version 11 © Copyright 2019 by Worksoft, Inc. All rights reserved. Worksoft is a business name of Worksoft, Inc. Information in this document is subject to change and revision without notice. The software described herein may only be used and copied as outlined in the Software License Agreement. No part of this manual may be reproduced by any means, electronic or mechanical, for any purpose other than the purchaser’s personal use, without prior written permission from Worksoft. Worksoft provides this documentation “as is” without warranty of any kind, either express or implied. Worksoft may revise information in this document without notice and does not represent a commitment on the part of Worksoft, Inc. Worksoft, Inc. may have patents or pending patent applications covering subject matter in this document. The furnishing of this document does not give you any license to these patents except as expressly provided in any written license agreement from Worksoft, Inc. Patent Worksoft Certify® U.S. Patent No. 7,600,220 Trademarks Worksoft Certify® is a registered trademark of Worksoft, Inc. Microsoft Office® is a registered trademark of Microsoft Corporation in the United States and/or other countries. Microsoft® is a registered trademark of Microsoft Corporation in the United States and/or other countries. All other trademarks and trade names mentioned in this guide are the property of their respective owners. Third-Party Copyrights This product includes software developed and copyrighted by the following persons or companies: Reprise License Manager™ Data Dynamics, Ltd., ActiveReports Microsoft® Enterprise Library Infragistics® NetAdvantage® Apache Logging Services log4net Antlr ANTLR The above copyright holders disclaim all responsibility or liability with respect to its usage or its effect upon hardware or computer systems. -
Installation Guide Release 1.2.5 Contents
Installation Guide Release 1.2.5 Contents 1 Requirements 1 1.1 Software dependencies........................................1 2 Installation 2 2.1 Obtain the Vortex Platform installation file.............................2 2.2 Run the Vortex Platform Setup Wizard...............................2 2.3 Vortex Web directories organization.................................9 2.4 Complete the installation for an Apache Maven build system.................... 10 2.5 Uninstalling Vortex Platform..................................... 10 3 Licensing Vortex Web 14 3.1 General................................................ 14 3.2 Development and Deployment Licenses............................... 14 3.3 Installing the License File...................................... 14 3.4 Running the License Manager Daemon............................... 15 3.5 Utilities................................................ 16 4 Compiling the examples 17 5 Troubleshooting 18 6 Contacts & Notices 19 6.1 Contacts............................................... 19 6.2 Notices................................................ 19 i CHAPTER 1 Requirements 1.1 Software dependencies 1.1.1 Required before installation The following software must be installed on your host system before installing Vortex Web: • An Oracle Java Development Kit (JDK) v7 minimum (ensure that JAVA_HOME is defined and that the java executable is in your PATH). 1.1.2 Other noteworthy dependencies Vortex Web uses the following open source libraries, which are automatically installed by the Vortex Setup Wizard if they -

Setting up Site Licenses
XC LICENSE SERVER Setting Up the Site Licenses INTRODUCTION To complete the installation of an XC Site License, create an options file that includes the Host Name (computer’s name) of each client machine. Save the options file as microchip.opt in the same directory as the license file. For example, if you have the Windows® version of the Network License Server installed, the path to the options file would be: C:\ProgramData\Microchip\xclm\license\microchip.opt In the options file, create a Host Name Group that lists all of the Host Names for the clients that will have access to the license. For example: HOST_GROUP xc8_users <hostname> <hostname2> ... The xc8_users is an arbitrary name. You can have multiple HOST_GROUP lines with the same name in the options file, and the server will concatenate the lists. To use the group, add: INCLUDE swxc8n-pro host_group xc8_user Where the swxc8n-pro is the product name in the license file, host_group specifies that a host group will be used, and xc8_user is the HOST_GROUP name. Possible product names are given in the table below. Product Name swxc8n-pro swxc16n-pro swxc32n-pro swxc32n-cpp For additional information see: • Starting the License Server • Running the License Server as a Service 2015 Microchip Technology Inc. DS50002337A-page 1 XC License Server STARTING THE LICENSE SERVER The installer does NOT start the server for you. Therefore, you MUST follow these instructions to start a network license server. To start the network license server, you need to have a Command or Terminal window open to the bin directory in the path that you selected to install the license server. -

RLM License Administration Manual Page 2 of 136 Revision History
RLM License Administration RLM v14.2 June, 2021 Table of Contents Section 1 – License Management Introduction Introduction ......................................................................................... 5 What's New in RLM v14.2 ................................................................. 7 Section 2 – License Administration Basics Installing an RLM-licensed Product …............................................. 9 The License Server ............................................................................. 11 The License File ................................................................................... 20 HOST line...................................................................................... 21 ISV line.......................................................................................... 21 LICENSE line............................................................................... 23 UPGRADE line............................................................................. 34 CUSTOMER line.......................................................................... 37 The License Environment............................................................ 38 License Administration Tools ............................................................ 40 Client Authentication.......................................................................... 48 The RLM Web Server......................................................................... 49 The RLM Options File ...................................................................... -

GASP Installation
GASP Installation AeroSoft, Inc. 2000 Kraft Drive, Suite 1400 Blacksburg, VA 24060-6363 (540) 557-1900 (540) 557-1919 (FAX) http://www.aerosoftinc.com Chapter 1 Getting Started 1.1 Overview of Steps The following list provides a general overview of the steps needed to install GASP. 1. Downloading and installing the software 2. Setting any necessary environment variables 3. Generating your machine's hostId 4. Requesting a license key 5. Installing the license 6. Running the license manager 7. Documentation and tutorial information The GASP software package can be installed on either linux or windows based platforms. Depending on the platform, the user will download either specific linux files or windows files. The specifics of each are explained in the following sections. Note: If a GASP license has already been installed on the local net- work, the user can skip steps 3 to 6. For installations where the license server is run on a different machine, the aerosoft/etc/keys/gasp.lic file should be modified to reflect the correct license server host. This is done using a text editor and changing \localhost" to the license server host name. 1 2 GASP Version 5, AeroSoft, Inc. 1.2 Installing GASP on Linux Platforms For linux installation, the user will need to install a common (platform independent) file archive, and a binary (platform specific) file archive. Both the common file archive and platform file archive help create the aerosoft directory (for more information about the directory structure, see the GASP users manual. The common file archive contains files that are independent of platform (i.e., operating system and hardware). -

Tecplot TM Enjoy the View
® Tecplot TM Enjoy the View “We have seen a major reduction in CFD post-processing time. This means that more resources can be devoted to running CFD simulations and analysis rather than struggling with data plotting issues.” - Mehul P. Patel, Orbital Research Inc. “We’re looking for separated flow and vortex shedding, and you can only really see that with good visualization in 3D...I don’t know what else I would do if I didn’t have Tecplot 360 to visualize this data.” - Michael Colonno, SpaceX “We save time, and hence money, in getting a quick snapshot of the behavior and assess if there are errors or flaws in the implementation of a solution algorithm.” - Adam Hapij, Weidlinger Associates, Inc. Complete CFD Visualization Tecplot 360 gets you answers faster. It enables you to quickly plot and animate all your simulation and experimental data exactly the way you want. Using just one tool, you can analyze and explore complex datasets, arrange multiple XY, 2D and 3D plots, and then communicate your results to colleagues and management with brilliant, high-quality output. Save even more time and effort by automating routine data analyses and plotting tasks. Dollar for dollar, Tecplot 360 is the most ver- satile, efficient way to analyze and present your results. With Tecplot 360 you can: Easily Understand Complex Physics and Relationships Gain full understanding with qualitative exploration tools and important quantita- tive plots XY, Polar, 2D and 3D plotting and animation tools in one unified environment Control over 2,500 attributes of your plot Unique multi-frame workspace allowing up to 128 drawing windows Assign arbitrary independent axes for specialty plots (i.e., Lift vs. -

SDL XPP Installation and Upgrade Guide for Windows
SDL XPP Installation and Upgrade Guide for Windows for use with SDL XPP 8.4 updated February 2012 Notice © SDL plc 2010, 2011, 2012. All rights reserved. Printed in U.S.A. SDL plc has prepared this document for use by its personnel, licensees, and customers. The information contained herein is the property of SDL and shall not, in whole or in part, be reproduced, translated, or converted to any electronic or machine-readable form without prior written approval from SDL. Printed copies are also covered by this notice and subject to any applicable confidentiality agreements. The information contained in this document does not constitute a warranty of performance. Further, SDL reserves the right to revise this document and to make changes from time to time in the content thereof. SDL assumes no liability for losses incurred as a result of out-of-date or incorrect information contained in this document. Trademark Notice See the Trademark Notice PDF file on your SDL product documentation CD-ROM for trademark information. U.S. Government Restricted Rights Legend Use, duplication or disclosure by the government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 or other similar regulations of other governmental agencies, which designate software and documentation as proprietary. Contractor or manufacturer is SDL plc, 101 Edgewater Drive, Wakefield, MA 01880-1296. ii SDL XPP Installation and Upgrade Guide for Windows Contents Chapter 1 Licensing About Licensing . 1-1 About Failover Servers . 1-2 Multiprocessor Reporting Tool . -
CTC BIM and HIVE Suites Installation and Configuration Guide
CTC BIM and HIVE Suites Installation and Configuration Guide Contents CTC Express Tools Overview ................................................................................................................................................ 5 General Security Requirements Summary........................................................................................................................... 5 Revit Workstations .............................................................................................................................................................. 5 Network Floating License Servers ....................................................................................................................................... 6 Upgrading a CTC Suite ......................................................................................................................................................... 6 Upgrading the Same Year Suite .......................................................................................................................................... 6 Upgrading to a New Year Suite ........................................................................................................................................... 6 General Licensing Information (Excluding HIVE) ................................................................................................................. 7 Timed Trial Licensing .......................................................................................................................................................... -
Tecplot Focus 2009 R2 Installation Guide
Installation Guide Release 2 Tecplot, Inc. Bellevue, WA 2009 COPYRIGHT NOTICE Tecplot FocusTM Installation Guide is for use with Tecplot FocusTM 2009 R2. Copyright © 1988-2009 Tecplot, Inc. All rights reserved worldwide. Except for personal use, this manual may not be reproduced, transmitted, transcribed, stored in a retrieval system, or translated in any form, in whole or in part, without the express written permission of Tecplot, Inc., 3535 Factoria Blvd., Ste 550, Bellevue, Washington, 98006, U.S.A. The software discussed in this documentation and the documentation itself are furnished under license for utilization and duplication only according to the license terms. The copyright for the software is held by Tecplot, Inc. Documentation is provided for information only. It is subject to change without notice. It should not be interpreted as a commitment by Tecplot, Inc. Tecplot, Inc. assumes no liability or responsibility for documentation errors or inaccuracies. Tecplot, Inc. Post Office Box 52708 Bellevue, WA 98015-2708 U.S.A. Tel: 1.800.763.7005 (within the U.S. or Canada), 00 1 (425) 653-1200 (internationally) email: [email protected], [email protected] Questions, comments or concerns regarding this document: [email protected] For more information, visit http://www.tecplot.com THIRD PARTY SOFTWARE COPYRIGHT NOTICES SciPy 2001-2009 Enthought. Inc. All Rights Reserved. NumPy 2005 NumPy Developers. All Rights Reserved. VisTools and VdmTools 1992-2009 Visual Kinematics, Inc. All Rights Reserved. NCSA HDF & HDF5 (Hierarchical Data Format) Software Library and Utilities Contributors: National Center for Supercomputing Applications (NCSA) at the University of Illinois, Fortner Software, Unidata Program Center (netCDF), The Independent JPEG Group (JPEG), Jean-loup Gailly and Mark Adler (gzip), and Digital Equipment Corporation (DEC). -
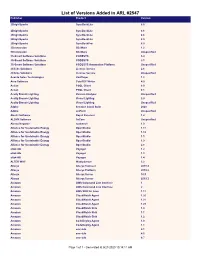
List of Versions Added in ARL #2547 Publisher Product Version
List of Versions Added in ARL #2547 Publisher Product Version 2BrightSparks SyncBackLite 8.5 2BrightSparks SyncBackLite 8.6 2BrightSparks SyncBackLite 8.8 2BrightSparks SyncBackLite 8.9 2BrightSparks SyncBackPro 5.9 3Dconnexion 3DxWare 1.2 3Dconnexion 3DxWare Unspecified 3S-Smart Software Solutions CODESYS 3.4 3S-Smart Software Solutions CODESYS 3.5 3S-Smart Software Solutions CODESYS Automation Platform Unspecified 4Clicks Solutions License Service 2.6 4Clicks Solutions License Service Unspecified Acarda Sales Technologies VoxPlayer 1.2 Acro Software CutePDF Writer 4.0 Actian PSQL Client 8.0 Actian PSQL Client 8.1 Acuity Brands Lighting Version Analyzer Unspecified Acuity Brands Lighting Visual Lighting 2.0 Acuity Brands Lighting Visual Lighting Unspecified Adobe Creative Cloud Suite 2020 Adobe JetForm Unspecified Alastri Software Rapid Reserver 1.4 ALDYN Software SvCom Unspecified Alexey Kopytov sysbench 1.0 Alliance for Sustainable Energy OpenStudio 1.11 Alliance for Sustainable Energy OpenStudio 1.12 Alliance for Sustainable Energy OpenStudio 1.5 Alliance for Sustainable Energy OpenStudio 1.9 Alliance for Sustainable Energy OpenStudio 2.8 alta4 AG Voyager 1.2 alta4 AG Voyager 1.3 alta4 AG Voyager 1.4 ALTER WAY WampServer 3.2 Alteryx Alteryx Connect 2019.4 Alteryx Alteryx Platform 2019.2 Alteryx Alteryx Server 10.5 Alteryx Alteryx Server 2019.3 Amazon AWS Command Line Interface 1 Amazon AWS Command Line Interface 2 Amazon AWS SDK for Java 1.11 Amazon CloudWatch Agent 1.20 Amazon CloudWatch Agent 1.21 Amazon CloudWatch Agent 1.23 Amazon -

SDL Contenta Server Upgrade Guide for Windows
SDL Contenta Server Upgrade Guide for Windows SDL Contenta 5.7 December 2018 Legal notice Copyright and trademark information relating to this product release. Copyright © 2009–2018 SDL Group. SDL Group means SDL PLC. and its subsidiaries and affiliates. All intellectual property rights contained herein are the sole and exclusive rights of SDL Group. All references to SDL or SDL Group shall mean SDL PLC. and its subsidiaries and affiliates details of which can be obtained upon written request. All rights reserved. Unless explicitly stated otherwise, all intellectual property rights including those in copyright in the content of this website and documentation are owned by or controlled for these purposes by SDL Group. Except as otherwise expressly permitted hereunder or in accordance with copyright legislation, the content of this site, and/or the documentation may not be copied, reproduced, republished, downloaded, posted, broadcast or transmitted in any way without the express written permission of SDL. Contenta is a registered trademark of SDL Group. All other trademarks are the property of their respective owners. The names of other companies and products mentioned herein may be the trademarks of their respective owners. Unless stated to the contrary, no association with any other company or product is intended or should be inferred. This product may include open source or similar third-party software, details of which can be found by clicking the following link: “Acknowledgments” on page 15. Although SDL Group takes all reasonable measures to provide accurate and comprehensive information about the product, this information is provided as-is and all warranties, conditions or other terms concerning the documentation whether express or implied by statute, common law or otherwise (including those relating to satisfactory quality and fitness for purposes) are excluded to the extent permitted by law.