Inferring the Effects of Wiping Motions Based on Haptic Perception
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Use Your Mophead
Use Your Mophead Hard-working,orking, high-performing mops makeake sense. Unisan™ mops up almost all cleaning challenges with innovative floor cleaning equipment that’s tough and environmentally friendly at the same time. The Patriot Mop offers great durability thanks to its unique yarn, sourced from military uniform manufacturing. The recycled yarn blends cotton and synthetics, including Kevlar®, for overall toughness and resistance to abrasion. The Patriot is designed for heavy duty use and reuse after laundering. EDGE® Nonwoven Cut End Wet Mops use a highly absorbent, 100% post-industrial fiber blend for increased absorption, so you get the same mopping power with less material. This leading-edge yarn is designed to avoid unraveling that leaves lint and broken strings behind. EDGE® heads are ideal for wax stripping, disinfecting, quick spill pick-up and general usage. Unisan takes mopping to the next level with innovative, eco-friendly materials. Mops & Equipment Dusters Bowl Brushes Brushes Brooms & Accessories Mops, Brooms & Brushes Cut-End Mop Heads CUT-END WET MOP HEADS Four-ply, cut-end yarn. Absorbent natural cotton fiber for general mopping. Rayon has immediate absorbency and wet release properties ideal for finishing. Cotton/synthetic blend absorbs 5.5 times its weight in water. Standard heads use clamp style mop handles; saddleback heads use clamp or gripper style handles; lieflat heads use lieflat screw-in handles (all sold separately). 12 mop heads per case. Handle sold No. Fiber Mop Size Case separately. A. EDGE® Nonwoven Cut End Wet Mop—Greater absorption gives the same mopping power with less material. Product contains 100% total recovered content. -

Class Room Cleaning
Muskogee Public Schools Custodial Procedures for classroom care CLASSROOM CLEANING PURPOSE FOR CLEANING CLASSROOMS A. Provide a clean healthy environment for the faculty, students, and visitors. B. Provide professional appearance in work areas, while daily disinfecting of critical area. Classroom Team Cleaning A. Students should put chairs on top of desk B. Students pick up books and supplies from floor C. Food or drinks should not be allowed in classrooms TOOLS NEEDED TO CLEAN A CLASSROOM A. Clean mop, bucket, and wringer filled with the proper cleaner according to manufacturer’s directions “Stride”. B. Spray bottle with “Triad or Virex” C. Spray bottle with “Degreaser” D. Trash can liners E. Clean rags F. Glass cleaner “Glance” G. Feather duster H. High duster I. Vacuum J. Dust mop K. Dust pan L. Dust Mop treatment M. Pick up brush or angle broom N. Putty knife O. “Wet Floor” sign P. Large rolling trash can Q. Material Safety Data Sheets for chemicals used R. Personal protective equipment as called for in MSDS S. If blood or other potentially infectious material is present, follow your site-specific exposure control plan and add biohazard bags or containers. Developed by Alice Robertson 7th & 8th Grade Center Professional Custodial Learning Community 10/27/10 Page 1 of 5 Muskogee Public Schools Custodial Procedures for classroom care PROCEDURES TO CLEAN A CLASSROOM Daily procedures A. Display “Wet Floor” signs at each entrance. B. High dust walls, ceilings, light fixtures, and vents C. Empty pencil sharpeners into waste baskets D. Pick up all large trash from floor and place into waste basket E. -
Custodial Contractual Service Bids
Custodial Contractual Service Bids Sandridge School District No. 172 Cook County, Illinois 60411 Sandridge School District No. 172 2950 Glenwood-Dyer Road Chicago Heights, IL 60411 (708) 895-2450 Invitation to Bid on Custodial Contractual Services BID OPENING: July 13, 2021, 10:00 a.m. Superintendent’s Office 2950 Glenwood-Dyer Road, Chicago Heights, IL 60411 NOTICE IS HEREBY GIVEN that sealed bids for the provisions of custodial services with an effective starting service date of July 26, 2021 will be received at the office of the Superintendent until the time and date indicated above. At that time they will be opened and read aloud. Bid proposals shall thereafter be irrevocable for a period of one hundred and twenty (120) days and shall be reviewed by the district so as to determine the lowest responsible bidder. No proposal received after the date and time indicated will be considered. The prospective bidder must be able to perform and must bid on all aspects of the bid to be eligible for award of the final contract. Each proposal must be wholly completed in the form prescribed in these bid documents and must be submitted in a sealed envelope which shall be marked with the following information: “Proposal for Custodial Services” Name and address of the contractual services bidder Attach the following to the submitted bid: Exhibit A – “Financial Forms for Submission” (To be supplied by bidder) Exhibit B – “Certificate of Eligibility to Bid” Exhibit C – “Proof of Insurability” Exhibit D – “Anti-collusion Affidavit” Exhibit E – “Sexual Harassment Certification” Exhibit F – “Cleaning Procedures” Exhibit G – “Drug Free Workplace Certification” Exhibit H – “Job Descriptions” (To be supplied by bidder) Exhibit I – “Cleaning Supplies” (To be supplied by bidder) The District looks forward to your participation in this bid. -

Removing Volcanic Ash from Inside the Home
Municipality of Anchorage Office of Emergency Management REMOVING VOLCANIC ASH FROM INSIDE THE HOME This information provided by the Municipality of Anchorage, Office of Emergency Management. The volcanic ash from is different than common household dust and dirt. Its crystalline structure of the new ash is sharp, jagged, and angular These wind-abraded particles could be easily brushed off, but the sharp angles of the ash cause it to cling to all surfaces, particularly to fabrics or surfaces covered with textiles. The sharp, crystalline structure of the ash causes it to scratch surfaces when it is brushed for removal. The jagged pieces in the ash will scratch porcelain enamel, glass, painted surfaces, appliances, wood furniture, acrylic furniture, hard surface flooring, and many other interior home surfaces. The static nature of the ash makes it cling to fabrics, hair, and shoes. CLOTHING • Avoid rubbing action on fabric that contains ash. The sharp particles may break or abrade the fibers that make up the yarns from which the fabric is woven or knit. • Shake garments vigorously outdoors to remove as much loose ash as possible. Vacuuming garments may also remove excessive soil. • Rinse and pre-soak rather than simply soaking. A more effective method of pretreatment might be to run water through the clothes until the water runs clear. An enzyme pre-soak product will not enhance cleaning. Most pre-soaks are enzyme products to remove protein stains. The ash is inorganic material; the particulates can be removed with detergent and water. • Use detergent to wash garments. You may wish to double the detergent to help suspend the hardness minerals found in the ash. -

Environmental Services Cleaning Guidebook
Environmental Services Cleaning Guidebook Adapted from Allina Hospitals and Clinics Environmental Services Cleaning Guidebook by the Minnesota Hospital Association (MHA), Minnesota Department of Health (MDH) and Stratis Health, with representatives from: CentraCare Health – Melrose, Grand Itasca Clinic and Hospital, Minnesota Valley Health Center, Park Nicollet Methodist Hospital, United Hospital, University of Minnesota Medical Center, and Windom Area Hospital, as a part of the “Controlling CDI” project. 1 2 Introduction Clostridium difficile infection (CDI) is becoming more prevalent as a health care-associated infection, causing diarrhea that can lead to colitis, colon perforation, sepsis, and, according to the Centers for Disease Control and Prevention (CDC), is fatal in approximately 14,000 Americans annually. CDC guidelines have been in place nationally for at least five years, targeting antimicrobial stewardship, early identification and treatment, and the prevention of health care facility transmission. A recent study by Sitzlar, et al. (2013) suggested that effective cleaning coupled with staff supervision is a powerful method in decreasing the potential for CDI transmission in hospitals. The Minnesota Hospital Association (MHA), in conjunction with Stratis Health and the Minnesota Department of Health (MDH), has been working with seven Minnesota hospitals: CentraCare Health – Melrose, Grand Itasca Clinic and Hospital, Minnesota Valley Health Center, Park Nicollet Methodist Hospital, United Hospital - a part of Allina Health, University of Minnesota Medical Center, and Windom Area Hospital, to adapt the Allina Health System environmental cleaning training and supervision model for statewide dissemination. The accompanying environmental services cleaning guidebook and training presentation apply to general infection and control principles, with CDI specific recommendations included, such as bleach or other sporicidal disinfectants. -

Brushes and Accessories
BRUSHES& ACCESSORIES Carlisle has the right professional grade cleaning tools to help you run a smarter, safer and more profitable operation. Our outstanding product selection offers innovative, hard-working products for everything from general cleaning, vehicle maintenance to restroom care. Product Page Product Page Acid Wash Brushes ................................................ 80, 82 Iron-Style Scrubs ..................................................... 76 Bowl Brushes. 87-88 Parts Cleaning Brushes ................................................ 83 Bowl Mops ......................................................... 87 Pointed End Scrubs ................................................... 77 Ceiling Fan Dusters ................................................... 86 Radiator Brushes ..................................................... 85 Counter Brushes ..................................................... 84 Scratch Brushes ..................................................... 79 Dip-Style Brushes .................................................... 82 Sponge ............................................................ 86 Dusters ............................................................ 86 Tile Brushes. .78 Ergonomic Scrubs ................................................. 74, 76 Utility Brushes ....................................................... 79 Flo-Thru Brushes .................................................. 80-81 Utility Scrubs ..................................................... 74-76 Force Cups ........................................................ -
Better for You, Better for the Environment
Proof 2 10/21/10 2011 OP238 NP256 Flow: Sec 6 pg 1 Spreads with OP239 NP255 NON-PRICED VERSION Better for You, Better for the Environment. The best mops are committed to all-round performance. Unisan™ mops tackle the toughest floor cleaning jobs, and help keep the environment healthy, too. It’s a win-win situation. The EchoMop Looped End Wet Mop Head has it all. It’s long-lasting, low-lint and quick-drying. It’s also a pioneer: the first mop made of fibers spun from recycled PET (polyethylene terephthalate) plastic bottles. By making a performance mop head with this material, we’re doing more than cleaning floors. We’re reducing landfill waste and energy consumption, and conserving petroleum resources. Another material that makes an environmental difference is microfiber. Our Microfiber Damp Mop and Microfiber Dust Mop clean effectively. This material picks up dust and dirt like a magnet, without harsh solutions and with minimal water. Innovative mops from Unisan are leading the way in environmentally friendly floor cleaning equipment. LS11_256_NP.indd 999 10/21/10 12:18:18 PM Proof 1 9/23/10 2011 OP239 NP257 Flow: Sec 6 pg 2 Spreads with 238 NP256 NON-PRICED VERSION not priced 2009 LAGASSE 5_1 OP 176 CM/PM Sect 05_Mops&Brooms Mops & Equipment Dusters Bowl Brushes Brushes Brooms & Accessories Mops, Brooms & Brushes LS11_257_NP.indd 239 9/23/10 9:24:31 AM Proof 1 10/27/10 Lagasse Supplier 2011 OP248 NP258 Flow: Sec 6 pg 3 Spreads with OP247 NP259 NON-PRICED VERSION Cut-End Mop Heads • Loop Mop Head Handle sold CUT-END WET MOP HEADS separately. -

General Cleaning Instructions for Elevator Interiors
Elevator Cab Renovations Toll Free: (613) 745-4870 [email protected] ____________________________________________________________________________________ GENERAL CLEANING AND MAINTENANCE FOR ELEVATOR INTERIORS. This package is designed to give instructions on the cleaning and maintenance of the many products used in the modernization of elevator interiors. The material contained within will provide general information, only, and may not apply to the customer’s specific requirements. If additional information is required, do not hesitate to call. WARNING: ALL CLEANING PRODUCTS SHOULD BE TESTED ON A SMALL INCONSPICUOUS LOCATION PRIOR TO FULL APPLICATION. 1 | P a g e Table of Contents Painted Surfaces .......................................................................................................................................... 4 Painted Surfaces .....................................................................................................................................................4 Ceilings ......................................................................................................................................................... 4 Aluminum Egg crate Louvers; .................................................................................................................................4 SS Drop Ceilings. .....................................................................................................................................................4 Wall Treatments ......................................................................................................................................... -
Nexstep 2020 Price List (LIST PRICE ONLY) Updated 112320.Xlsx
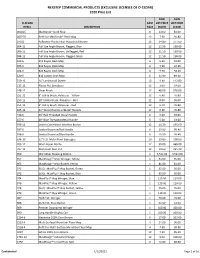
NEXSTEP COMMERCIAL PRODUCTS (EXCLUSIVE LICENSEE OF O-CEDAR) 2020 Price List NEW NEW O-CEDAR CASE LIST PRICE LIST PRICE ITEM # DESCRIPTION PACK (EACH) (CASE) 000225 MaxiScrub® Deck Mop 6 13.60 81.60 000226 Refill for MaxiScrub® Deck Mop 12 7.90 94.80 07012 Pollyanna Plastic Fiber Household Broom 12 14.80 177.60 094-12 Full Size Angle Broom, Flagged, Blue 12 11.50 138.00 096-12 Full Size Angle Broom, Unflagged, Red 12 11.50 138.00 098-12 Full Size Angle Broom, Flagged, Black 12 11.50 138.00 102-6 #12 Rayon Deck Mop 6 6.50 39.00 103-6 #16 Rayon Deck Mop 6 7.90 47.40 104-6 #20 Rayon Deck Mop 6 9.70 58.20 120-6 #32 Cotton Deck Mop 6 14.90 89.40 230-12 14" Lambswool Duster 12 9.40 112.80 235-12 Plastic Pot Scrubbers 12 2.00 24.00 248-12 Slicer Brush 12 48.00 576.00 252-12 9" Utility Brush, Polyester - Yellow 12 6.40 76.80 253-12 20" Utility Brush, Polyester - Red 12 8.00 96.00 254-12 9" Utility Brush, Polyester - Red 12 6.40 76.80 405-12 54" Wood Handle w/Metal Threads 12 6.40 76.80 456-6 60" Red Threaded Metal Handle 6 5.60 33.60 457-6 60" Blue Threaded Metal Handle 6 5.60 33.60 596-12 Janitor Corrections Wireless Broom 12 16.30 195.60 597-6 Janitor Broom w/Red Handle 6 15.90 95.40 598-6 Janitor Broom w/Blue Handle 6 15.90 95.40 636-10 22" H.D. -

MILWAUKEE DUSTLESS BRUSH Gordon Brush Wisconsin, LLC
MILWAUKEE DUSTLESS BRUSH Gordon Brush Wisconsin, LLC Innovative Products that Clean Better and Last Longer We of Milwaukee Dustless Brush pride ourselves in a team approach to serving our customers’ needs. The goal of our continuous improvement philosophy is to provide our customers with the best value possible. This value is a combination of innovative products built using only the highest quality components and delivered to our customers on time. Contents Product Trade Name Page Acid Brushes ......................................................................................................................................28 Bench Brushes ...................................................................................................................................14 Block Scrub Brushes .........................................................................................................................26 Bowl Brushes .....................................................................................................................................22 Brooms, Upright..................................................................................................................................8, 9, 11-13 Commercial Kitchen Tools ..................................................................................................................22-24 Corn Brooms, Natural Fiber ................................................................................................................12, 13 Corn Brooms, Synthetic Fiber ....................Speedy -

Dusting Guidelines for Stone Objects and Interior Architectural Features
December 2000 Number 15/2 Dusting Guidelines For Stone Objects And Interior Architectural Features Dust is everywhere. If ignored, it will ash component or that which is blown off of a aesthetically disfigure and may even physically dirt road, desert, or beach is quite abrasive and damage objects. However, if you establish and can scratch objects if pressure is applied during adhere to a routine maintenance plan, dusting its removal. If the dust in your building has an can become a simple and effective task. With abrasive component, you should consult with a regular dusting, dirt build-up can be avoided, conservator to create a proper and safe dusting costly cleaning programs can be spaced further protocol. (For information on volcanic dust, see apart, and the components of dust that cause Conserve O Gram 3/5.) Soot (from fires and allergic reactions or attract insects can be greatly puff-backs) is exceptionally tenacious and if reduced. Furthermore, a dusting regimen is a dusting alone is not effective in its elimination, way to ensure regular examination of objects for you will need a conservator’s assistance in changes in their condition. creating an effective removal plan. This Conserve O Gram is specifically written for Why Dust? the care of large stone objects and interior architectural features, including statuary and Dusting stone objects serves several functions: pedestals, sculptures, plaques, furniture, fireplace mantles, door and window architraves, • It eliminates a substance that is visually balustrades, and kitchen and bathroom fixtures. unattractive and obscures an object’s color, (It can also be used for similar objects in plaster, surface features, and form. -
Common Seashore Animals of Southeastern Alaska a Field Guide by Aaron Baldwin
Common seashore animals of Southeastern Alaska A field guide by Aaron Baldwin All pictures taken by Aaron Baldwin Last update 9/15/2014 unless otherwise noted. [email protected] Seashore animals of Southeastern Alaska By Aaron Baldwin Introduction Southeast Alaska (the “Alaskan Panhandle”) is an ecologically diverse region that extends from Yakutat to Dixon Entrance south of Prince of Wales Island. A complex of several hundred islands, fjords, channels, and bays, SE Alaska has over 3,000 miles of coastline. Most people who live or visit Southeast Alaska have some idea of the incredible diversity of nature found here. From mountain tops to the cold, dark depths of our many fjords, life is everywhere. The marine life of SE Alaska is exceptionally diverse for several reasons. One is simply the amount of coast, over twice the amount of the coastline of Washington, Oregon, and California combined! Within this enormous coastline there is an incredible variety of habitats, each with their own ecological community. Another reason for SE Alaska’s marine diversity is that we are in an overlap zone between two major faunal provinces. These provinces are defined as large areas that contain a similar assemblage of animals. From northern California to SE Alaska is a faunal province called the Oregonian Province. From the Aleutian Island chain to SE Alaska is the Aleutian Province. What this means is that while our sea life is generally similar to that seen in British Columbia and Washington state, we also have a great number of northern species present. History of this guide http://www.film.alaska.gov/ This guide began in 2009 as a simple guide to common seashore over 600 species! In addition to expanding the range covered, I animals of Juneau, Alaska.