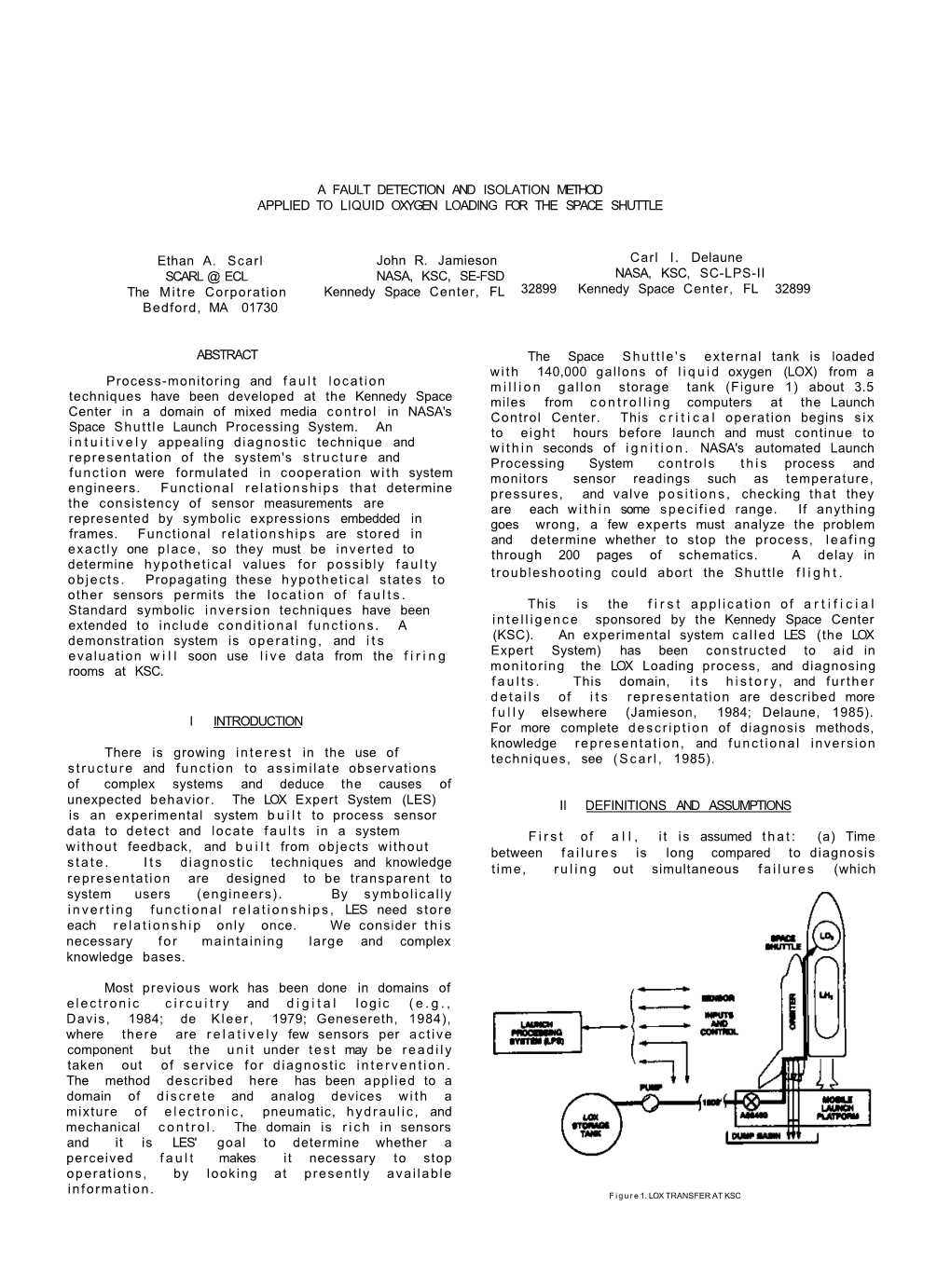
A Fault Detection and Isolation Method Applied to Liquid Oxygen Loading for the Space Shuttle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Atlas V Cutaway Poster
ATLAS V Since 2002, Atlas V rockets have delivered vital national security, science and exploration, and commercial missions for customers across the globe including the U.S. Air Force, the National Reconnaissance Oice and NASA. 225 ft The spacecraft is encapsulated in either a 5-m (17.8-ft) or a 4-m (13.8-ft) diameter payload fairing (PLF). The 4-m-diameter PLF is a bisector (two-piece shell) fairing consisting of aluminum skin/stringer construction with vertical split-line longerons. The Atlas V 400 series oers three payload fairing options: the large (LPF, shown at left), the extended (EPF) and the extra extended (XPF). The 5-m PLF is a sandwich composite structure made with a vented aluminum-honeycomb core and graphite-epoxy face sheets. The bisector (two-piece shell) PLF encapsulates both the Centaur upper stage and the spacecraft, which separates using a debris-free pyrotechnic actuating 200 ft system. Payload clearance and vehicle structural stability are enhanced by the all-aluminum forward load reactor (FLR), which centers the PLF around the Centaur upper stage and shares payload shear loading. The Atlas V 500 series oers 1 three payload fairing options: the short (shown at left), medium 18 and long. 1 1 The Centaur upper stage is 3.1 m (10 ft) in diameter and 12.7 m (41.6 ft) long. Its propellant tanks are constructed of pressure-stabilized, corrosion-resistant stainless steel. Centaur is a liquid hydrogen/liquid oxygen-fueled vehicle. It uses a single RL10 engine producing 99.2 kN (22,300 lbf) of thrust. -

Phase Change: Titan’S Disappearing Lakes
Phase Change: Titan’s Disappearing Lakes Investigation Notebook NYC Edition © 2018 by The Regents of the University of California. All rights reserved. No part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopy, recording, or any information storage or retrieval system, without permission in writing from the publisher. Teachers purchasing this Investigation Notebook as part of a kit may reproduce the book herein in sufficient quantities for classroom use only and not for resale. These materials are based upon work partially supported by the National Science Foundation under grant numbers DRL-1119584, DRL-1417939, ESI-0242733, ESI-0628272, and ESI-0822119. The Federal Government has certain rights in this material. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation. These materials are based upon work partially supported by the Institute of Education Sciences, U.S. Department of Education, through Grant R305A130610 to The Regents of the University of California. The opinions expressed are those of the authors and do not represent views of the Institute or the U.S. Department of Education. Developed by the Learning Design Group at the University of California, Berkeley’s Lawrence Hall of Science. Amplify. 55 Washington Street, Suite 800 Brooklyn, NY 11201 1-800-823-1969 www.amplify.com Phase Change: Titan’s Disappearing Lakes -

Launcherone Success Opens New Space Access Gateway Guy Norris January 22, 2021
1/22/21 7:05 1/6 LauncherOne Success Opens New Space Access Gateway Guy Norris January 22, 2021 With San Nicolas Island far below, LauncherOne headed for polar orbit. Credit: Virgin Orbit Virgin Orbit had barely tweeted news of the successful Jan. 17 space debut of its LauncherOne vehicle on social media when new launch contracts began arriving in the company’s email inbox. A testament to the pent-up market demand for small-satellite launch capability, the speedy reaction to the long-awaited demonstration of the new space-access vehicle paves the way for multiple follow-on Virgin Orbit missions by year-end and a potential doubling of the rate in 2022. First successful privately developed air-launched, liquid-fueled rocket Payloads deployed for NASA’s Venture Class Launch Services program The glitch-free !ight of LauncherOne on its second demonstration test was a critical and much-welcomed milestone for the Long Beach, California-based company. Coming almost nine years a"er the air-launch concept was #rst unveiled by Virgin founder Richard Branson, and six years a"er the start of full-scale development, the !ight followed last May’s #rst demonstration mission, which ended abruptly when the rocket motor shut o$ a"er just 4 sec. 1/22/21 7:05 2/6 A"er an exhaustive analysis and modi#cations to beef up the oxidizer feed line at the heart of the #rst !ight failure, the path to the Launch Demo 2 test was then delayed until January 2021 by the COVID-19 pandemic. With the LauncherOne system now proven, design changes veri#ed and the #rst 10 small satellites placed in orbit, Virgin Orbit is already focusing on the next steps to ramp up its production and launch-cadence capabilities. -

AEROSPACE ENGINEERING AE449 Senior Design Project I!1 Auburn University, Alabama
AEROSPACE ENGINEERING AE449 Senior Design Project I!1 Auburn University, Alabama FINAL STUDY REPORT FOR THE SPACE SHUTTLE II ADVANCED SPACE TRANSPORTATION SYSTEM Volume I: Executive Summary Submitted to: Dr. James O. Nichols Submitted by: James N. Adinaro Philip A. Benefield Shelby D. Johnson Lisa K. Knight Date Submitted: April 27, 1989 Table of Contents t . 1.0 ProjectSummary 1 2.0 Review 2 3.0 Proposed System Configuration 3 3.1 Changes in Preliminary Configuration 3 3.2 Wing 3 3.3 VerticalTail 4 3.4 Forward Fuselage 6 3.5 Mid Fuselage 6 3.6Aft Fuselage 8 3.7 Fuel and OxidizerTanks 8 3.8 Payload Bay and Payload Bay Doors 9 3.9Thrust Structure 12 3.10 Ascent Propulsion 12 3.11 Fuel/OxidizerFeed System 12 3.12 OrbitalManeuvering System/Reaction Control System 14 3.13 Landing Structures 14 • '" 4.0 Performance/Mission Analysis 15 4.1 Launch Event Schedule 15 4.2 Booster Launch/Landing Event Schedule 16 4.3 Orbital Event Schedule 17 4.4 Orbiter Landing Event Schedule 17 5.0 Stability and Control 19 6.0 Interface With Other Systems 21 7.0 Safety Analysis 22 7.1 Ascent Propulsion Failure Modes 24 7.2 Structural Failure Modes 24 7.3 Electronic Controls Failure Modes 25 8.0 Bibliography 27 9.0 Miscellaneous Figures 29 1.0 Project Summary This reportsummarizes an investigationintothe feasibilityof establishinga second generationspace transportationsystem. Incorporatingsuccessfulsystems from the Space Shuttle and technologicaladvances made sinceitsconception,the second generation shuttle presentedhere was designed tobe a lower-cost,more reliablesystem which would guarantee accessto space well intothe next century.A fullyreusable,all-liquidpropellant booster/orbitercombination using parallelburn was selectedas the base configuration. -
Liquid Oxygen
Safetygram 6 Liquid oxygen Oxygen is the second largest component of the atmosphere, comprising 20.8% by volume. Liquid oxygen is pale blue and extremely cold. Although nonflammable, oxygen is a strong oxidizer. Oxygen is necessary to support life. Oxygen will react with nearly all organic materials and metals, usually forming an oxide. Materials that burn in air will burn more vigorously in oxygen. Equipment used in oxygen service must meet stringent cleaning requirements, and systems must be constructed of materials that have high ignition temperatures and that are nonreactive with oxygen under the service conditions. Vessels should be manufactured to American Society of Mechanical Engineers (ASME) codes and designed to withstand the process temperatures and pressures. Liquid oxygen is a cryogenic liquid. Cryogenic liquids are liquefied gases that have a normal boiling point below –130°F (–90°C). Liquid oxygen has a boiling point of –297°F (–183°C). Because the temperature difference between the product and the surrounding environment is substantial—even in the winter—keeping liquid oxygen insulated from the surrounding heat is essential. The product also requires special equipment for handling and storage. Oxygen is often stored as a liquid, although it is used primarily as a gas. Liquid storage is less bulky and less costly than the equivalent capacity of high-pressure gaseous storage. A typical storage system consists of a cryogenic storage tank, one or more vaporizers and a pressure control system. The cryogenic tank is constructed, in principle, like a vacuum bottle. There is an inner vessel surrounded by an outer vessel. Between the vessels is an annular space that contains an insulating medium from which all the air has been removed. -

Mr. Soon-Young Park Korea Aerospace Research Institute (KARI), Korea, Republic Of, [email protected]
70th International Astronautical Congress 2019 Paper ID: 50565 IAF SPACE PROPULSION SYMPOSIUM (C4) Propulsion System (1) (1) Author: Mr. Soon-Young Park Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Yoonwan Moon Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Hwan-Seok CHOI Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Chang Ho Choi Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Sangyeop Han Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Yeoung-Min Han Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] Dr. Jinhan Kim Korea Aerospace Research Institute (KARI), Korea, Republic of, [email protected] DEVELOPMENT STATUS OF BOOSTER STAGE LIQUID ROCKET ENGINE OF KSLV-II PROGRAM Abstract South Korea's indigenous three-staged liquid propellant rocket Korea Space Launch Vehicle-II (KSLV- II) also known as Nuri is now developing by Korea Aerospace Research Institute (KARI). KSLV-II planned to launch into space in 2021 at the NARO Space Center located the southern coast of Korea peninsular. Both the booster stage and the second stage of KSLV-II are propelled by the newly developing 75-tonf thrust level liquid-propellant rocket engines (KRE-075) and the third stage is powered by a 7-tonf thrust level rocket engine (KRE-007). KRE-075 fueled by kerosene and liquid oxygen which have some heritage of predecessor LV (KSR-III and KSLV-I). For the simplicity of its design and the parallel development logic to reduce the development schedule of the key components such as combustion chamber and turbopump, we adopted the reliable gas-generator cycle. -

Mission Overview
Perseverance rover to a hyperbolic escape orbit collect and store samples of selected rock and MISSION where it will begin a 7-month journey to Mars. soil, and prepare for future human missions. will occur from Space Launch Complex-41 Perseverance rover will carry seven primary at Cape Canaveral Air Force Station, Florida. instruments: MASTCAM-Z, Mars Environmental Dynamics Analyzer (MEDA), Mars Oxygen ISRU OVERVIEW The Mars 2020 mission with its Perseverance Experiment (MOXIE), Planetary Instrument for rover is part of NASA’s Mars Exploration Pro- X-ray Lithochemistry (PIXL), Radar Imager for gram, a long-term efort of robotic exploration Mars’ Subsurface Experiment (RIMFAX), Scan- of the red planet. A team from the Jet Propulsion ning Habitable Environments with Raman & Laboratory (JPL) built the spacecraft. The Perse- Luminescence for Organics & Chemicals (SHER- verance rover will seek signs of ancient life and LOC), and SuperCam. Also, the Mars helicopter, collect rock and soil samples for possible return Ingenuity, will ride to Mars attached to the belly of the rover. The helicopter is a technology demonstration to test the first powered flight on Mars. Mars 2020 and the Perseverance rover are scheduled to arrive at Mars in February 2021. The mission duration is at least one Mars year (about One of the most powerful rockets 687 Earth days). ULA and its heritage vehicles ATLAS V in the Atlas V fleet, the 541 have launched every U.S. led mission to Mars. configuration, with four solid rocket Mars 2020 will continue the legacy started by boosters, provides the optimum earlier missions to provide NASA and JPL with performance to precisely deliver a crucial knowledge and understanding of the red planet. -

Analysis of Propellant Tank Masses
Analysis of Propellant Tank Masses Steven S. Pietrobon, Ph.D. Abstract Ð For the Direct 3.0 architecture the dry weight of the Earth departure stage (EDS) is critical for the architecture to work. We provide an independent analysis using actual data of previous liquid hydrogen and oxygen stages to show that the Direct 3.0 EDS dry stage mass is theoretically possible. However, we recommend a standard 15% margin be added to the EDS mass due to the combination of new technologies and techniques the stage will use. Index Terms Ð Jupiter, Direct, EDS I. INTRODUCTION N the Direct 3.0 architecture the Jupiter 246 launch vehicle is first used to launch an Earth depar- Iture stage (EDS) into low Earth orbit. A second Jupiter then launches the Altair Lunar lander and Orion crew exploration vehicle. The Altair/Orion stack then docks with the EDS which then fires to send Altair/Orion to the Moon. A controversial aspect of the Direct architecture has been the dry weight of the EDS. The current design has a dry weight of 11,238 kg (similar to the Saturn V S±IVB) for a propellant mass of 175,519 kg (65% greater than the propellant carried in the S±IVB). In order to understand how Direct achieves such a low mass we first analyse the stage masses of all previously constructed liquid hydrogen and oxygen stages. This allows us to obtain a very simple model of stage mass as a function of propellant mass. We then apply two key technologies used by Direct, a common bulkhead and the use of Aluminium Lithium alloy. -

Launch Moves Closer for UK
Information Classification: CONTROLLED Spaceport Cornwall: launch moves closer for the UK ● Spaceport Cornwall partner, Virgin Orbit, successfully completes first full orbital launch of satellite technology; bringing Cornwall one step closer to launch from UK soil ● Over 350 job roles to be created in space and associated industries through Spaceport Cornwall As vital space programmes continue during the pandemic, Virgin Orbit has successfully completed the first full orbital launch of its LauncherOne system in the USA. Excitement has been building for many weeks in anticipation of this launch, which brings the UK’s first ever launch from sovereign soil at Spaceport Cornwall a step closer. On Sunday 17th of January, Virgin Orbit successfully accomplished their first commercial launch, with the company’s carrier aircraft Cosmic Girl taking off from Mojave Air and Space Port in California. Following the partial success of their first launch demo last May, the Virgin Orbit team have been focused on getting to this second launch. The rocket used for Launch Demo 2 shipped out of the factory for pre- launch activities in early November. At Mojave Air and Space Port, the system underwent extensive checkouts and tests, including fully loading the rocket with propellants like cryogenic liquid oxygen to verify the health of all rocket systems. The work leading up to the launch benefited hugely from operational refinements, as the Virgin Orbit team completed technical milestones at a much faster and more efficient pace compared to the initial demo. During this launch, LauncherOne was carried to an altitude of more than 30,000 feet before it was dropped from the carrier aircraft and ignited its engines, launching into orbit. -

19630000838.Pdf
NASA SP-IO Office of Scientific and Technical Information NA110NAl AERONAUTICS AND SPACE ADMINISTRATION Washington, D.C. • November 1962 front (over: Atlas-Agena B INTRODUCTION THE space research pro gram of the United States, leading in the years just ahead to manned exploration of the moon, and in the more distant future to manned exploration of the near planets, turns on the ability of our scientists and en gineers to provide the means for p'ropelling useful pay loads through the earth's enveloping atmosphere and into the void of space. For this task, launch vehicles of a number of sizes and capabilities are necessary. Con sequently, the United States is developing a family of launch vehicles ranging in size and power from the slender Scout to the giant Nova. Obviously, it would be unwise to use a ten-ton truck to carry a few parcels or to risk a break-down by overloading a small truck. Similarly, it would be im practicable to use Saturn or Nova to orbit a small, light weight group of scientific instruments, or take the risk of failure involved in placing too much weight on any size rocket. Either would be expensive and inefficient. By developing a family of reliable launch vehicles, the Nation will have available the right size for the right job and avoid the expense of employing vehicles that are either larger and more powerful than necessary, or are marginal in power for the job at hand. [ I ] • For each of the nation's launch vehicles, missions have been assigned. These missions range from scientific research and exploration to tasks vitally necessary for the national defense. -

ARIANE Dépliant Techn GB 1/12/99 17:39 Page 3
ARIANE dépliant techn GB 1/12/99 17:39 Page 1 Europe Head office Boulevard de l’Europe B.P.177 - 91006 Evry Cedex - France Tel:+ 33 1 60 87 60 00 Arianespace 1999. Fax: + 33 1 60 87 62 47 vitz - Photos: F. Buxin, B. Paris, USA Subsidiary ARIANESPACE Inc. 601 13th Street - N.W. Suite 710 North Washington D.C. 20005 Tel:+ 1 202 628-3936 Fax: + 1 202 628-3949 TECHNICAL INFORMATION French Guiana Facilities ARIANESPACE Kourou B.P.809 97388 Kourou Cedex Tel:+ 594 33 67 07 Fax: + 594 33 69 13 Singapore Liaison office ARIANESPACE ASEAN Office Shenton House # 25-06 3 Shenton Way Singapour 068805 Tél : + 65 223 64 26 Fax : + 65 223 42 68 Japan Liaison office ARIANESPACE Tokyo Kasumigaseki Building, 31Fl. 3-2-5 Kasumigaseki Chiyoda-ku Tokyo 100-6031 Tél : + 81 3 3592-2766 Fax : + 81 3 3592-2768 Publication:Arianespace International Affairs and Corporate Communications - Design and printing: ByTheWay - Adaptation: - Design and printing:Affairs and Corporate Communications Publication:Arianespace - J. International ByTheWay Lenoro D. Matra Lanceurs, Parker,Aerospatiale ESA, Space, Matra Marconi Service Optique CSG, Snecma, X - Illustrations: D. Ducros, Medialogie. © www.arianespace.com ARIANE dépliant techn GB 1/12/99 17:39 Page 3 The reference for new generation heavy-lift launchers Arianespace is the world's com- mercial space transportation leader, earning this position through the management, marketing and operation of Europe's reliable Ariane 1-4 launcher series. To meet tomorrow's market requirements, Arianespace is introducing the Ariane 5 heavy- lift launcher. This capable new vehicle is perfectly tailored to the increasingly diversified demand for service - including heavier and larger satellites, a wider range of orbits and combined missions. -

SLS Core Stage, Including Pounds) Liquid Oxygen (LOX) Its Avionics
National Aeronautics and Space Administration Space Launch System Core Stage NASA’s Space Launch System (SLS) core stage is astronauts, and a large cargo to the Moon on a single the world’s tallest and most powerful rocket stage. mission. This reduces the number and complexity of Towering 212 feet with a diameter of 27.6 feet, it will in-space operations and increases the chances of store cryogenic liquid hydrogen and liquid oxygen mission success. and all the systems that will feed the stage’s four The core stage serves as the backbone of the rocket, RS-25 engines. It also houses the flight computers supporting the weight of the payload, upper stage, and much of the avionics needed to control the and crew vehicle, as well as the thrust of its four facts rocket’s flight. The core stage is designed to operate RS-25 engines and two five-segment solid rocket for approximately 500 seconds, reaching nearly boosters attached to the engine and intertank Mach 23 and more than 530,000 feet in altitude sections. before it separates from the upper stage and Orion spacecraft. The core stage is the same diameter as the space shuttle external tank and is covered with an orange SLS is an advanced, super heavy-lift launch vehicle spray-on foam to insulate the cryogenic propellants. that will provide an entirely new capability for science The stage is made up of 10 major barrel sections, and human exploration beyond Earth’s orbit. With four dome sections and seven rings. Each cylindrical unmatched payload mass and volume capability, SLS barrel section consists of eight aluminum panels that is the only rocket that can send the Orion spacecraft, NASA vary in length and height.