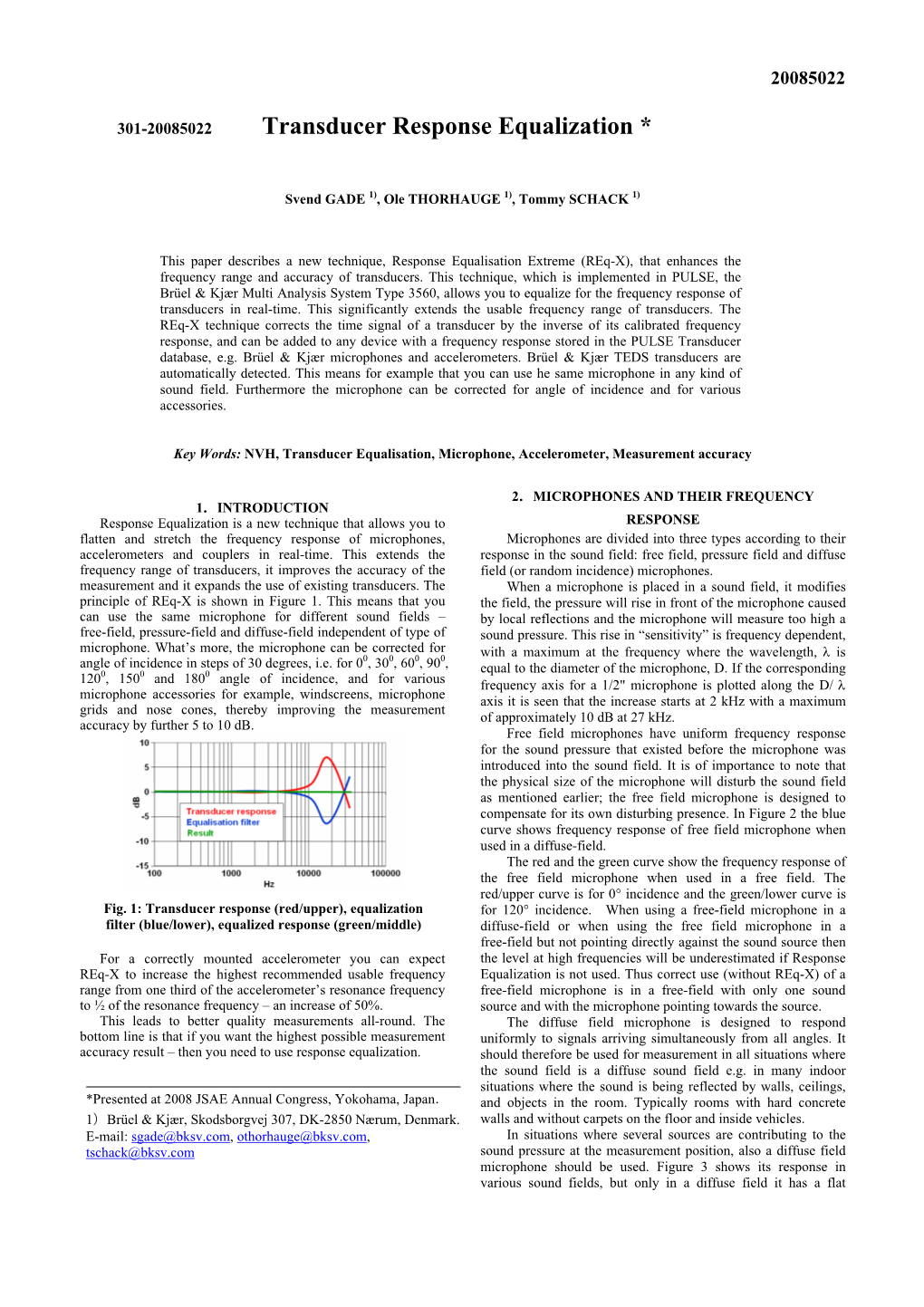
Transducer Response Equalization (Bn0382)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A GUIDE to USING FETS for SENSOR APPLICATIONS by Ron Quan
Three Decades of Quality Through Innovation A GUIDE TO USING FETS FOR SENSOR APPLICATIONS By Ron Quan Linear Integrated Systems • 4042 Clipper Court • Fremont, CA 94538 • Tel: 510 490-9160 • Fax: 510 353-0261 • Email: [email protected] A GUIDE TO USING FETS FOR SENSOR APPLICATIONS many discrete FETs have input capacitances of less than 5 pF. Also, there are few low noise FET input op amps Linear Systems that have equivalent input noise voltages density of less provides a variety of FETs (Field Effect Transistors) than 4 nV/ 퐻푧. However, there are a number of suitable for use in low noise amplifier applications for discrete FETs rated at ≤ 2 nV/ 퐻푧 in terms of equivalent photo diodes, accelerometers, transducers, and other Input noise voltage density. types of sensors. For those op amps that are rated as low noise, normally In particular, low noise JFETs exhibit low input gate the input stages use bipolar transistors that generate currents that are desirable when working with high much greater noise currents at the input terminals than impedance devices at the input or with high value FETs. These noise currents flowing into high impedances feedback resistors (e.g., ≥1MΩ). Operational amplifiers form added (random) noise voltages that are often (op amps) with bipolar transistor input stages have much greater than the equivalent input noise. much higher input noise currents than FETs. One advantage of using discrete FETs is that an op amp In general, many op amps have a combination of higher that is not rated as low noise in terms of input current noise and input capacitance when compared to some can be converted into an amplifier with low input discrete FETs. -

The Frequency Element: Using the Equalizer
Chapter 7 The Frequency Element: Using The Equalizer Even though an engineer has every intention of making his recording sound as big and as clear as possible during tracking and overdubs, it often happens that the frequency range of some (or even all) of the tracks are somewhat limited when it comes time to mix. This can be due to the tracks being recorded in a different studio where different monitors or signal path was used, the sound of the instruments themselves, or the taste of the artist or producer. When it comes to the mix, it’s up to the mixing engineer to extend the frequency range of those tracks if it’s appropriate. In the quest to make things sound bigger, fatter, brighter, and clearer, the equalizer is the chief tool used by most mixers, but perhaps more than any other audio tool, it’s how it’s used that separates the average engineer from the master. “I tend to like things to sound sort of natural, but I don’t care what it takes to make it sound like that. Some people get a very preconceived set of notions that you can’t do this or you can’t do that, but as Bruce Swedien said to me, he doesn’t care if you have to turn the knob around backwards; if it sounds good, it is good. Assuming that you have a reference point that you can trust, of course.” —Allen Sides “I find that the more that I mix, the less I actually EQ, but I’m not afraid to bring up a Pultec and whack it up to +10 if something needs it.” —Joe Chiccarelli The Goals Of Equalization While we may not think about it when we’re doing it, there are three primary goals when equalizing: To make an instrument sound clearer and more defined. -
Transducers and Sensors
3/7/2017 TRANSDUCERS AND SENSORS Dr. Ibrahim Al-Naimi Closed‐loop Control System 1 3/7/2017 CHAPTER ONE Introduction Functional Elements of a Measurement System • Basic Functional Elements 1‐Transducer Element 2‐ Signal Conditioning Element 3‐ Data Presentation Element • Auxiliary Functional Elements A‐ Calibration Element B‐ External Power supply 2 3/7/2017 Functional Elements of a Measurement System Transducer and Signal Conditioning 3 3/7/2017 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer Element • The Transducer element normally senses the desired input in one physical form and convert it to an output in another physical form. For example, the input variable to the transducer could be pressure, acceleration, or temperature and the output of transducer may be disp lacemen t, voltage, or resitistance change depending on the type of transducer element. 4 3/7/2017 Transducer Element • Single stage • Double stage Single Stage Transducer 5 3/7/2017 Double Stage Transducer Typical Examples of Transducer Elements 6 3/7/2017 Typical Examples of Transducer Elements Typical Examples of Transducer Elements 7 3/7/2017 Transducers classification • Based on power type classification ‐ Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) ‐ Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal ‐ Analogue Transducers (stain gauges, LVDT, etc…) ‐ Digital Transducers (Absolute and incremental encoders) 8 3/7/2017 Transducers classification • Based on the electrical phenomenon or parameter tha t may be chdhanged due to the whole process. -
Transducers in Audio ● Transducer: Any Mechanism That Transforms One Form of Energy Into Another Form of Energy
Transducers in Audio ● Transducer: Any mechanism that transforms one form of energy into another form of energy. ○ Physical energy into mechanical energy ○ Physical energy into electrical energy ○ Mechanical energy into electrical energy ○ Vice versa Audio is primarily concerned with turning physical acoustic energy into electrical energy and back again. What are our two most basic audio transducers? scienceaid.net https://socratic.org/questions/what-part-of-the-ear-contains-the-sensory-receptors-for-hearing From Acoustic to Electric Energy First...a short trip into basic electrical theory... Michael Faraday http://www.rigb.org/our-history/michael-faraday Electro-magnetism Faraday’s Law of Induction: Basically, any change in the magnetic field of a coil of wire will cause a voltage to be induced in a wire. Conversely, any change in the voltage on a coil of wire will cause the magnetic field to change. This is called electromagnetism, and the field created is called an electro-magnetic field. Capacitance When two conductors are given an opposite charge, an electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors (for example the distance between them) changes it causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png Capacitance When two conductors are given an opposite charge, a electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors, for example the distance between them, changes is causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png ● Alternating Current (AC) vs Direct Current (DC) ○ AC charge changes from positive to negative across the zero axis. -

TA-1VP Vocal Processor
D01141720C TA-1VP Vocal Processor OWNER'S MANUAL IMPORTANT SAFETY PRECAUTIONS ªª For European Customers CE Marking Information a) Applicable electromagnetic environment: E4 b) Peak inrush current: 5 A CAUTION: TO REDUCE THE RISK OF ELECTRIC SHOCK, DO NOT REMOVE COVER (OR BACK). NO USER- Disposal of electrical and electronic equipment SERVICEABLE PARTS INSIDE. REFER SERVICING TO (a) All electrical and electronic equipment should be QUALIFIED SERVICE PERSONNEL. disposed of separately from the municipal waste stream via collection facilities designated by the government or local authorities. The lightning flash with arrowhead symbol, within equilateral triangle, is intended to (b) By disposing of electrical and electronic equipment alert the user to the presence of uninsulated correctly, you will help save valuable resources and “dangerous voltage” within the product’s prevent any potential negative effects on human enclosure that may be of sufficient health and the environment. magnitude to constitute a risk of electric (c) Improper disposal of waste electrical and electronic shock to persons. equipment can have serious effects on the The exclamation point within an equilateral environment and human health because of the triangle is intended to alert the user to presence of hazardous substances in the equipment. the presence of important operating and (d) The Waste Electrical and Electronic Equipment (WEEE) maintenance (servicing) instructions in the literature accompanying the appliance. symbol, which shows a wheeled bin that has been crossed out, indicates that electrical and electronic equipment must be collected and disposed of WARNING: TO PREVENT FIRE OR SHOCK separately from household waste. HAZARD, DO NOT EXPOSE THIS APPLIANCE TO RAIN OR MOISTURE. -

Driverack 260 Owner's Manual-English
DriveRack® Complete Equalization & Loudspeaker Management System 260 Featuring Custom Tunings User Manual ® Table of Contents DriveRack TABLE OF CONTENTS Introduction 4.9 Compressor/Limiter .........................................................33 0.1 Defining the DriveRack 260 System .................................1 4.10 Alignment Delay ............................................................36 0.2 Service Contact Info ..........................................................2 4.11 Input Routing (IN) .........................................................36 0.3 Warranty .............................................................................3 4.12 Output ............................................................................37 Section 1 – Getting Started Section 5 – Utilities/Meters 1.1 Rear Panel Connections ....................................................4 5.1 LCD Contrast/Auto EQ Plot ............................................38 1.2 Front Panel .........................................................................5 5.2 PUP Program/Mute ..........................................................38 1.3 Quick Start .........................................................................6 5.3 ZC Setup ..........................................................................39 5.4 Security .............................................................................41 Section 2 – Editing Functions 5.5 Program List/Program Change ........................................43 5.6 Meters ...............................................................................44 -

Block Diagram of PA System
PHY_366 (A) - TECHNICAL ELECTRONICS- II UNIT 2 – PUBLIC ADDRESS SYSTEM Dr. Uday Jagtap Dept of Physics, Dhanaji Nana Mahavidyalaya, Faizpur. Contents: . Block diagram of P.A. system and its explanation, requirements of P A system, typical P.A. Installation planning (Auditorium having large capacity, college sports), Volume control, Tone control and Mixer system, . Concept of Hi-Fi system, Monophony, Stereophony, Quadra phony, Dolby-A and Dolby-B system, . CD- Player: Block diagram of CD player and function of each block. 29/01/2019, USJ Block diagram of P.A. system: 29/01/2019 Basic Requirements of PA System: . Acoustic feed back: The sound from the loudspeakers should not reach microphone. It may result in loud howling sound. Distribution of Sound Intensity: Instead of installing one or two powerful loudspeakers near the stage alone, audio power should be divided between several loudspeakers to spread it right up to the farthest point. This covers every specified area. Reverberation (Echo): Install several small power loudspeakers at various points to get rid of problem of overlapping of sound waves in the auditorium, rather than using single power high power unit. 29/01/2019, USJ Basic Requirements of PA System: . Orientation of speakers: The loudspeakers be oriented as to direct the sound towards the audience and not towards walls. The loudspeakers should preferably be placed a meter off the floor, so that their axes are about the height of the ears of the listeners. Selection of Microphone: Microphone for PA system should be preferably cardiod type, it will prevent reflection of sound from loudspeakers. For dramas use directive microphone. -

Using the BHM Binaural Head Microphone
Application Note – 11/17 BHM Using the BHM binaural head microphone Introduction 1 Recording with a binaural head microphone 2 Equalization of a BHM recording 2 Individual equalization curves 5 Using the equalization curves 5 Post-processing in ArtemiS SUITE 6 Playback of a BHM recording 7 Application example: BHM recording in a vehicle 7 Introduction HEAD acoustics offers a range of binaural audio sensors for recording sound events in different environments in a way that allows aurally accurate playback. This means that the recordings are made in a way that ensures that they – when played back with the correct playback equalization – give a listener the same impression as if he were present in the original sound field. These binaural sensors include, for example, the artificial head HMS (HEAD Measurement System) and the Binaural Head Microphone (BHM). The BHM allows binaural recordings to be made in places where an artificial head measurement system cannot be used. This is the case, for example, with recordings to be made on the driver’s seat in a moving vehicle. Here it is impossible to use an artificial head measurement system. Instead, a binaural head microphone can be worn by the driver, which measures the sound directly at the entrance of the driver’s ear canals (see figure1). Figure 1: Using the BHM │1│ HEAD acoustics Application Note BHM Recording with a binaural head microphone A frequent application for a binaural head microphone is recording in a vehicle. In order to obtain reproducible results, the following must be observed when making recordings with the BHM: Particularly in a complex acoustic environment as is a vehicle cabin, the positioning of the microphones has a significant influence on the recording. -

Basic Physics of Ultrasonographic Imaging
BASIC PHYSICS OF ULTlVlSONOGRAPHIC IMAGING Diagnostic Imaging and Laboratory Technology Essential Health Technologies Health Technology and Pharmaceuticals WORLD HEALTH ORGANIZATION Geneva BASIC PHYSICS OF ULTRASONOGRAPHIC IMAGING Editor Harald Ostensen Author Nimrod M. Tole, Ph.D. Associate Professor of Medical Physics Department of Diagnostic Radiology University of Nairobi WORLD HEALTH ORGANIZATION WHO Library Cataloguing-in-Publication Data Tole, Nimrod M. Basic physics of ultrasonic imaging / by Nimrod M. Tole. 1. Ultrasonography I. Title. ISBN 92 41592990 (NLM classification: WN 208) © World Health Organization 2005 All rights reserved. Publications of the World Health Organization can be obtained from WHO Press, World Health Organization, 20 Avenue Appia, 1211 Geneva 27, Switzerland (tel: +41 22 791 2476; fax: +41 22791 4857; email: [email protected]). Requests for permission to reproduce or translate WHO publications - whether for sale or for noncommercial distribution - should be addressed to WHO Press, at the above address (fax: +41 22791 4806; email: [email protected]). The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the World Health Organization concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. Dotted lines on maps represent approximate border lines for which there may not yet be full agreement. The mention of specific companies or of certain manufacturers' products does not imply that they are endorsed or recommended by the World Health Organization in preference to others of a similar nature that are not mentioned. -
Introduction to Music Technology
PUBLIC SCHOOLS OF EDISON TOWNSHIP DIVISION OF CURRICULUM AND INSTRUCTION INTRODUCTION TO MUSIC TECHNOLOGY Length of Course: Semester (Full Year) Elective / Required: Elective Schools: High Schools Student Eligibility: Grade 9-12 Credit Value: 5 credits Date Approved: September 24, 2012 Introduction to Music Technology TABLE OF CONTENTS Statement of Purpose ----------------------------------------------------------------------------------- 3 Introduction ------------------------------------------------------------------------------------------------- 4 Course Objectives ---------------------------------------------------------------------------------------- 6 Unit 1: Introduction to Music Technology Course and Lab ------------------------------------9 Unit 2: Legal and Ethical Issues In Digital Music -----------------------------------------------11 Unit 3: Basic Projects: Mash-ups and Podcasts ------------------------------------------------13 Unit 4: The Science of Sound & Sound Transmission ----------------------------------------14 Unit 5: Sound Reproduction – From Edison to MP3 ------------------------------------------16 Unit 6: Electronic Composition – Tools For The Musician -----------------------------------18 Unit 7: Pro Tools ---------------------------------------------------------------------------------------20 Unit 8: Matching Sight to Sound: Video & Film -------------------------------------------------22 APPENDICES A Performance Assessments B Course Texts and Supplemental Materials C Technology/Website References D Arts -

Chapter 1 Introduction to Measurement Systems
4/3/2019 Advanced Measurement Systems and Sensors Dr. Ibrahim Al-Naimi Chapter one Introduction to Measurement Systems 1 4/3/2019 Outlines • Control and measurement systems • Transducer/sensor definition and classifications • Signal conditioning definition and classifications • Units of measurements • Types of errors • Transducer/sensor transfer function • Transducer characteristics • Statistical analysis Closed-loop Control System 2 4/3/2019 Measurement System Transducer and Signal Conditioning 3 4/3/2019 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer and Sensor • Transducers are elements that respond to changes in the physical condition of a system and deliver output signals related to the measured, but of a different form and nature. • Sensor is the initial stage in any transducer. • The property of transducer element is affected by the variation of the external physical variable according to unique relationship. 4 4/3/2019 Transducers classification • Based on power type classification - Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) - Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal - Analogue Transducers (stain -

Maximizing Efficiency in Active Loudspeaker Systems
Maximizing Efficiency in Active Loudspeaker Systems Wolfgang Klippel, KLIPPEL GmbH, Dresden, Germany Increasing the efficiency of the electro-acoustical conversion is the key to modern audio devices generating the required sound output with minimum size, weight, cost and energy. There is unused potential for increasing the efficiency of the electro-dynamical transducer by using a nonlinear motor topology, a soft suspension and cultivating the modal resonances in the mechanical and acoustical system. However, transducers optimized for maximum efficiency are more prone to nonlinear and unstable behavior. Nonlinear adaptive control can compensate for the undesired signal distortion, protect the transducer against overload, stabilize the voice coil position and cope with time varying properties of the suspension. The paper discusses the design of modern active systems that combine the new opportunities provided by software algorithms with the optimization of the hardware components in the transducer and power amplifier. reducing power consumption in portable 1 Introduction applications with limited battery capacity. The user of loudspeakers, headphone and other For this discussion, the paper provides new audio devices expects that the audio signal can be definitions of the efficiency to consider the influence reproduced at sufficient amplitude and quality but of the spectral properties of the complex audio prefers products which are smaller, lighter, less cost signals (e.g. music). The paper explains the intensive and provide a longer stand-alone operation difference between efficiency and voltage in personal applications. sensitivity, which is a second important Creating such an audio product requires a characteristic of the transducer required to match the combination of hardware and software components transducer with the power amplifier.