Polygons, Polyhedra, Patterns & Beyond
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

And Twelve-Pointed Star Polygon Design of the Tashkent Scrolls
Bridges 2011: Mathematics, Music, Art, Architecture, Culture A Nine- and Twelve-Pointed Star Polygon Design of the Tashkent Scrolls B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University West Long Branch, New Jersey, 07764, USA E-mail: [email protected] Abstract In this paper we will explore one of the Tashkent Scrolls’ repeat units, that, when replicated using symmetry operations, creates an overall pattern consisting of “nearly regular” nine-pointed, regular twelve-pointed and irregularly-shaped pentagonal star polygons. We seek to determine how the original designer of this pattern may have determined, without mensuration, the proportion and placement of the star polygons comprising the design. We will do this by proposing a plausible Euclidean “point-joining” compass-and-straightedge reconstruction. Introduction The Tashkent Scrolls (so named because they are housed in Tashkent at the Institute of Oriental Studies at the Academy of Sciences) consist of fragments of architectural sketches attributed to an Uzbek master builder or a guild of architects practicing in 16 th century Bukhara [1, p. 7]. The sketch from the Tashkent Scrolls that we will explore shows only a small portion, or the repeat unit , of a nine- and twelve-pointed star polygon design. It is contained within a rectangle and must be reflected across the boundaries of this rectangle to achieve the entire pattern. This drawing, which for the remainder of this paper we will refer to as “T9N12,” is similar to many of the 114 Islamic architectural and ornamental design sketches found in the much larger, older and better preserved Topkapı Scroll, a 96-foot-long architectural scroll housed at the Topkapı Palace Museum Library in Istanbul. -
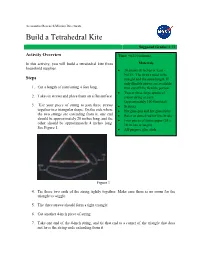
Build a Tetrahedral Kite
Aeronautics Research Mission Directorate Build a Tetrahedral Kite Suggested Grades: 8-12 Activity Overview Time: 90-120 minutes In this activity, you will build a tetrahedral kite from Materials household supplies. • 24 straws (8 inches or less) - NOTE: The straws need to be Steps straight and the same length. If only flexible straws are available, 1. Cut a length of yarn/string 4 feet long. then cut off the flexible portion. • Two or three large spools of 2. Take six straws and place them on a flat surface. cotton string or yarn (approximately 100 feet total) 3. Use your piece of string to join three straws • Scissors together in a triangular shape. On the side where • Hot glue gun and hot glue sticks the two strings are extending from it, one end • Ruler or dowel rod for kite bridle should be approximately 20 inches long, and the • Four pieces of tissue paper (24 x other should be approximately 4 inches long. 18 inches or larger) See Figure 1. • All-purpose glue stick Figure 1 4. Tie these two ends of the string tightly together. Make sure there is no room for the triangle to wiggle. 5. The three straws should form a tight triangle. 6. Cut another 4-inch piece of string. 7. Take one end of the 4-inch string, and tie that end to a corner of the triangle that does not have the string ends extending from it. Figure 2. 8. Add two more straws onto the longest piece of string. 9. Next, take the string that holds the two additional straws and tie it to the end of one of the 4-inch strings to make another tight triangle. -

On the Archimedean Or Semiregular Polyhedra
ON THE ARCHIMEDEAN OR SEMIREGULAR POLYHEDRA Mark B. Villarino Depto. de Matem´atica, Universidad de Costa Rica, 2060 San Jos´e, Costa Rica May 11, 2005 Abstract We prove that there are thirteen Archimedean/semiregular polyhedra by using Euler’s polyhedral formula. Contents 1 Introduction 2 1.1 RegularPolyhedra .............................. 2 1.2 Archimedean/semiregular polyhedra . ..... 2 2 Proof techniques 3 2.1 Euclid’s proof for regular polyhedra . ..... 3 2.2 Euler’s polyhedral formula for regular polyhedra . ......... 4 2.3 ProofsofArchimedes’theorem. .. 4 3 Three lemmas 5 3.1 Lemma1.................................... 5 3.2 Lemma2.................................... 6 3.3 Lemma3.................................... 7 4 Topological Proof of Archimedes’ theorem 8 arXiv:math/0505488v1 [math.GT] 24 May 2005 4.1 Case1: fivefacesmeetatavertex: r=5. .. 8 4.1.1 At least one face is a triangle: p1 =3................ 8 4.1.2 All faces have at least four sides: p1 > 4 .............. 9 4.2 Case2: fourfacesmeetatavertex: r=4 . .. 10 4.2.1 At least one face is a triangle: p1 =3................ 10 4.2.2 All faces have at least four sides: p1 > 4 .............. 11 4.3 Case3: threefacesmeetatavertes: r=3 . ... 11 4.3.1 At least one face is a triangle: p1 =3................ 11 4.3.2 All faces have at least four sides and one exactly four sides: p1 =4 6 p2 6 p3. 12 4.3.3 All faces have at least five sides and one exactly five sides: p1 =5 6 p2 6 p3 13 1 5 Summary of our results 13 6 Final remarks 14 1 Introduction 1.1 Regular Polyhedra A polyhedron may be intuitively conceived as a “solid figure” bounded by plane faces and straight line edges so arranged that every edge joins exactly two (no more, no less) vertices and is a common side of two faces. -

THE GEOMETRY of PYRAMIDS One of the More Interesting Solid
THE GEOMETRY OF PYRAMIDS One of the more interesting solid structures which has fascinated individuals for thousands of years going all the way back to the ancient Egyptians is the pyramid. It is a structure in which one takes a closed curve in the x-y plane and connects straight lines between every point on this curve and a fixed point P above the centroid of the curve. Classical pyramids such as the structures at Giza have square bases and lateral sides close in form to equilateral triangles. When the closed curve becomes a circle one obtains a cone and this cone becomes a cylindrical rod when point P is moved to infinity. It is our purpose here to discuss the properties of all N sided pyramids including their volume and surface area using only elementary calculus and geometry. Our starting point will be the following sketch- The base represents a regular N sided polygon with side length ‘a’ . The angle between neighboring radial lines r (shown in red) connecting the polygon vertices with its centroid is θ=2π/N. From this it follows, by the law of cosines, that the length r=a/sqrt[2(1- cos(θ))] . The area of the iscosolis triangle of sides r-a-r is- a a 2 a 2 1 cos( ) A r 2 T 2 4 4 (1 cos( ) From this we have that the area of the N sided polygon and hence the pyramid base will be- 2 2 1 cos( ) Na A N base 2 4 1 cos( ) N 2 It readily follows from this result that a square base N=4 has area Abase=a and a hexagon 2 base N=6 yields Abase= 3sqrt(3)a /2. -

Applying the Polygon Angle
POLYGONS 8.1.1 – 8.1.5 After studying triangles and quadrilaterals, students now extend their study to all polygons. A polygon is a closed, two-dimensional figure made of three or more non- intersecting straight line segments connected end-to-end. Using the fact that the sum of the measures of the angles in a triangle is 180°, students learn a method to determine the sum of the measures of the interior angles of any polygon. Next they explore the sum of the measures of the exterior angles of a polygon. Finally they use the information about the angles of polygons along with their Triangle Toolkits to find the areas of regular polygons. See the Math Notes boxes in Lessons 8.1.1, 8.1.5, and 8.3.1. Example 1 4x + 7 3x + 1 x + 1 The figure at right is a hexagon. What is the sum of the measures of the interior angles of a hexagon? Explain how you know. Then write an equation and solve for x. 2x 3x – 5 5x – 4 One way to find the sum of the interior angles of the 9 hexagon is to divide the figure into triangles. There are 11 several different ways to do this, but keep in mind that we 8 are trying to add the interior angles at the vertices. One 6 12 way to divide the hexagon into triangles is to draw in all of 10 the diagonals from a single vertex, as shown at right. 7 Doing this forms four triangles, each with angle measures 5 4 3 1 summing to 180°. -

Polygon Review and Puzzlers in the Above, Those Are Names to the Polygons: Fill in the Blank Parts. Names: Number of Sides
Polygon review and puzzlers ÆReview to the classification of polygons: Is it a Polygon? Polygons are 2-dimensional shapes. They are made of straight lines, and the shape is "closed" (all the lines connect up). Polygon Not a Polygon Not a Polygon (straight sides) (has a curve) (open, not closed) Regular polygons have equal length sides and equal interior angles. Polygons are named according to their number of sides. Name of Degree of Degree of triangle total angles regular angles Triangle 180 60 In the above, those are names to the polygons: Quadrilateral 360 90 fill in the blank parts. Pentagon Hexagon Heptagon 900 129 Names: number of sides: Octagon Nonagon hendecagon, 11 dodecagon, _____________ Decagon 1440 144 tetradecagon, 13 hexadecagon, 15 Do you see a pattern in the calculation of the heptadecagon, _____________ total degree of angles of the polygon? octadecagon, _____________ --- (n -2) x 180° enneadecagon, _____________ icosagon 20 pentadecagon, _____________ These summation of angles rules, also apply to the irregular polygons, try it out yourself !!! A point where two or more straight lines meet. Corner. Example: a corner of a polygon (2D) or of a polyhedron (3D) as shown. The plural of vertex is "vertices” Test them out yourself, by drawing diagonals on the polygons. Here are some fun polygon riddles; could you come up with the answer? Geometry polygon riddles I: My first is in shape and also in space; My second is in line and also in place; My third is in point and also in line; My fourth in operation but not in sign; My fifth is in angle but not in degree; My sixth is in glide but not symmetry; Geometry polygon riddles II: I am a polygon all my angles have the same measure all my five sides have the same measure, what general shape am I? Geometry polygon riddles III: I am a polygon. -

Squaring the Circle a Case Study in the History of Mathematics the Problem
Squaring the Circle A Case Study in the History of Mathematics The Problem Using only a compass and straightedge, construct for any given circle, a square with the same area as the circle. The general problem of constructing a square with the same area as a given figure is known as the Quadrature of that figure. So, we seek a quadrature of the circle. The Answer It has been known since 1822 that the quadrature of a circle with straightedge and compass is impossible. Notes: First of all we are not saying that a square of equal area does not exist. If the circle has area A, then a square with side √A clearly has the same area. Secondly, we are not saying that a quadrature of a circle is impossible, since it is possible, but not under the restriction of using only a straightedge and compass. Precursors It has been written, in many places, that the quadrature problem appears in one of the earliest extant mathematical sources, the Rhind Papyrus (~ 1650 B.C.). This is not really an accurate statement. If one means by the “quadrature of the circle” simply a quadrature by any means, then one is just asking for the determination of the area of a circle. This problem does appear in the Rhind Papyrus, but I consider it as just a precursor to the construction problem we are examining. The Rhind Papyrus The papyrus was found in Thebes (Luxor) in the ruins of a small building near the Ramesseum.1 It was purchased in 1858 in Egypt by the Scottish Egyptologist A. -

Binary Icosahedral Group and 600-Cell
Article Binary Icosahedral Group and 600-Cell Jihyun Choi and Jae-Hyouk Lee * Department of Mathematics, Ewha Womans University 52, Ewhayeodae-gil, Seodaemun-gu, Seoul 03760, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2-3277-3346 Received: 10 July 2018; Accepted: 26 July 2018; Published: 7 August 2018 Abstract: In this article, we have an explicit description of the binary isosahedral group as a 600-cell. We introduce a method to construct binary polyhedral groups as a subset of quaternions H via spin map of SO(3). In addition, we show that the binary icosahedral group in H is the set of vertices of a 600-cell by applying the Coxeter–Dynkin diagram of H4. Keywords: binary polyhedral group; icosahedron; dodecahedron; 600-cell MSC: 52B10, 52B11, 52B15 1. Introduction The classification of finite subgroups in SLn(C) derives attention from various research areas in mathematics. Especially when n = 2, it is related to McKay correspondence and ADE singularity theory [1]. The list of finite subgroups of SL2(C) consists of cyclic groups (Zn), binary dihedral groups corresponded to the symmetry group of regular 2n-gons, and binary polyhedral groups related to regular polyhedra. These are related to the classification of regular polyhedrons known as Platonic solids. There are five platonic solids (tetrahedron, cubic, octahedron, dodecahedron, icosahedron), but, as a regular polyhedron and its dual polyhedron are associated with the same symmetry groups, there are only three binary polyhedral groups(binary tetrahedral group 2T, binary octahedral group 2O, binary icosahedral group 2I) related to regular polyhedrons. -

Can Every Face of a Polyhedron Have Many Sides ?
Can Every Face of a Polyhedron Have Many Sides ? Branko Grünbaum Dedicated to Joe Malkevitch, an old friend and colleague, who was always partial to polyhedra Abstract. The simple question of the title has many different answers, depending on the kinds of faces we are willing to consider, on the types of polyhedra we admit, and on the symmetries we require. Known results and open problems about this topic are presented. The main classes of objects considered here are the following, listed in increasing generality: Faces: convex n-gons, starshaped n-gons, simple n-gons –– for n ≥ 3. Polyhedra (in Euclidean 3-dimensional space): convex polyhedra, starshaped polyhedra, acoptic polyhedra, polyhedra with selfintersections. Symmetry properties of polyhedra P: Isohedron –– all faces of P in one orbit under the group of symmetries of P; monohedron –– all faces of P are mutually congru- ent; ekahedron –– all faces have of P the same number of sides (eka –– Sanskrit for "one"). If the number of sides is k, we shall use (k)-isohedron, (k)-monohedron, and (k)- ekahedron, as appropriate. We shall first describe the results that either can be found in the literature, or ob- tained by slight modifications of these. Then we shall show how two systematic ap- proaches can be used to obtain results that are better –– although in some cases less visu- ally attractive than the old ones. There are many possible combinations of these classes of faces, polyhedra and symmetries, but considerable reductions in their number are possible; we start with one of these, which is well known even if it is hard to give specific references for precisely the assertion of Theorem 1. -

Barn-Raising an Endo-Pentakis-Icosi-Dodecaherdon
BRIDGES Mathematical Connections in Art, Music, and Science Barn-Raising an Endo-Pentakis-Icosi-Dodecaherdon Eva Knoll and Simon Morgan Rice University Rice University School Mathematics Project MS-172 6100 Main Street Houston, Texas 77005 [email protected] Abstract The workshop is planned as the raising of an endo-pentakis-icosi-dodecaherdon with a 1 meter edge length. This collective experience will give the participants new insights about polyhedra in general. and deltahedra in particular. The specific method of construction applied here. using kite technology and the snowflake layout allows for a perspective entirely different from that found in the construction of hand-held models or the observation of computer animations. In the present case. the participants will be able to pace the area of the flat shape and physically enter the space defined by the polyhedron. Introduction 1.1 The Workshop. The event is set up so that the audience participates actively in the construction. First, the triangles are laid out by six groups of people in order to complete the net. Then the deltahedron is assembled collectively, under the direction of the artist. The large scale of the event is designed expressly to give the participant a new point of view with regards to polyhedra. Instead of the "God's eye view" of hand held shapes, or the tunnel vision allowed by computer modelling, the barn-raising will give the opportunity to observe the deltahedron on a human scale, where the shape's structure is tangible in terms of the whole body, not limited to the finger tips and the eye. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs. -

Order in Space
Order in space A.K. van der Vegt VSSD Other textbooks on mathematics, published by VSSD Mathematical Systems Theory, G. Olsder and J.W. van der Woude, x + 210 pp. See http://www.vssd.nl/hlf/a003.htm Numerical Methods in Scientific Computing, J. van Kan, A. Segal and F. Vermolen, xii + 279 pp. See http://www.vssd.nl/hlf/a002.htm By the author of Order in space: From Plastics to Polymers, A.K. van der Vegt, 268 pp. See http://www.vssd.nl/hlf/m028.htm © VSSD Edition on the internet, 2001 Printed edition 2006 Published by: VSSD Leeghwaterstraat 42, 2628 CA Delft, The Netherlands tel. +31 15 27 82124, telefax +31 15 27 87585, e-mail: [email protected] internet: http://www.vssd.nl/hlf URL about this book: http://www.vssd.nl/hlf/a017.htm A collection of digital pictures and/or an electronic version can be made available for lecturers who adopt this book. Please send a request by e-mail to [email protected] All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photo-copying, recording, or otherwise, without the prior written permission of the publisher. NUR 918 ISBN-10: 90-71301-61-3 ISBN-13: 978-90-71301-61-2 Keywords: geometry 3 PREFACE This book deals with a very old subject. Many centuries ago some people were already fascinated by polyhedra, and they spent much time in investigating regular spatial structures. In the terminology of polyhedra we, therefore, meet the names of Archimedes, Pythagoras, Plato, Kepler etc.