What Are Lyapunov Exponents, and Why Are They Interesting?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2006 Annual Report
Contents Clay Mathematics Institute 2006 James A. Carlson Letter from the President 2 Recognizing Achievement Fields Medal Winner Terence Tao 3 Persi Diaconis Mathematics & Magic Tricks 4 Annual Meeting Clay Lectures at Cambridge University 6 Researchers, Workshops & Conferences Summary of 2006 Research Activities 8 Profile Interview with Research Fellow Ben Green 10 Davar Khoshnevisan Normal Numbers are Normal 15 Feature Article CMI—Göttingen Library Project: 16 Eugene Chislenko The Felix Klein Protocols Digitized The Klein Protokolle 18 Summer School Arithmetic Geometry at the Mathematisches Institut, Göttingen, Germany 22 Program Overview The Ross Program at Ohio State University 24 PROMYS at Boston University Institute News Awards & Honors 26 Deadlines Nominations, Proposals and Applications 32 Publications Selected Articles by Research Fellows 33 Books & Videos Activities 2007 Institute Calendar 36 2006 Another major change this year concerns the editorial board for the Clay Mathematics Institute Monograph Series, published jointly with the American Mathematical Society. Simon Donaldson and Andrew Wiles will serve as editors-in-chief, while I will serve as managing editor. Associate editors are Brian Conrad, Ingrid Daubechies, Charles Fefferman, János Kollár, Andrei Okounkov, David Morrison, Cliff Taubes, Peter Ozsváth, and Karen Smith. The Monograph Series publishes Letter from the president selected expositions of recent developments, both in emerging areas and in older subjects transformed by new insights or unifying ideas. The next volume in the series will be Ricci Flow and the Poincaré Conjecture, by John Morgan and Gang Tian. Their book will appear in the summer of 2007. In related publishing news, the Institute has had the complete record of the Göttingen seminars of Felix Klein, 1872–1912, digitized and made available on James Carlson. -

Amie Wilkinson 1
Amie Wilkinson 1 Amie Wilkinson Department of Mathematics, University of Chicago 5734 S. University Avenue Chicago, Illinois 60637 (773) 702-7337 [email protected] ACADEMIC POSITIONS • Professor of Mathematics, University of Chicago, 2012 { present. • Professor of Mathematics, Northwestern University, 2005 { 2012. • Associate Professor of Mathematics, Northwestern University, 2002 { 2005. • Assistant Professor of Mathematics, Northwestern University, 1999 { 2002. • Boas Assistant Professor of Mathematics, Northwestern University, 1996 { 1999. • Benjamin Peirce Instructor, Harvard University, 1995 { 1996. Visiting Positions • Visiting Professor, University of Chicago, Fall and Spring Quarters 2003{2004, Fall Quarter 2011. • Professeur Invit´e, Universit´ede Bourgogne, May 2002 and Sept 2003. • Member, Institut des Hautes Etudes Scientifiques (IHES), Summer 1993, 1996, 1998. • Visitor, IBM T.J. Watson Labs, Yorktown NY, Winter 1992 and 1994, Summer 1997, 1998, 2000, and 2001. • Graduate Research Assistant, The Center for Nonlinear Studies, Los Alamos National Laboratories, Summer, 1992. EDUCATION • Ph.D. in Mathematics, University of California, Berkeley, May 1995 • A.B. in Mathematics, Harvard University, June 1989 DATE OF BIRTH April, 1968. U.S. citizen. Amie Wilkinson 2 RESEARCH INTERESTS • Ergodic theory and smooth dynamical systems • Geometry and regularity of foliations • Actions of discrete groups on manifolds • Dynamical systems of geometric origin GRANTS, FELLOWSHIPS AND AWARDS • Levi L. Conant Prize, 2020. • Foreign Member, Academia Europaea, 2019. • Fellow of the American Mathematical Society, 2013. • Ruth Lyttle Satter Prize, 2011. • NSF Grant \Ergodicity, Rigidity, and the Interplay Between Chaotic and Regular Dynamics" $758,242, 2018{2021. • NSF Grant \Innovations in Bright Beam Science" (co-PI) $680,000, 2015{2018. • NSF Grant \RTG: Geometry and topology at the University of Chicago" (co-PI) $1,377,340, 2014{2019. -

CURRENT EVENTS BULLETIN Friday, January 8, 2016, 1:00 PM to 5:00 PM Room 4C-3 Washington State Convention Center Joint Mathematics Meetings, Seattle, WA
A MERICAN M ATHEMATICAL S OCIETY CURRENT EVENTS BULLETIN Friday, January 8, 2016, 1:00 PM to 5:00 PM Room 4C-3 Washington State Convention Center Joint Mathematics Meetings, Seattle, WA 1:00 PM Carina Curto, Pennsylvania State University What can topology tell us about the neural code? Surprising new applications of what used to be thought of as “pure” mathematics. 2:00 PM Yuval Peres, Microsoft Research and University of California, Berkeley, and Lionel Levine, Cornell University Laplacian growth, sandpiles and scaling limits Striking large-scale structure arising from simple cellular automata. 3:00 PM Timothy Gowers, Cambridge University Probabilistic combinatorics and the recent work of Peter Keevash The major existence conjecture for combinatorial designs has been proven! 4:00 PM Amie Wilkinson, University of Chicago What are Lyapunov exponents, and why are they interesting? A basic tool in understanding the predictability of physical systems, explained. Organized by David Eisenbud, Mathematical Sciences Research Institute Introduction to the Current Events Bulletin Will the Riemann Hypothesis be proved this week? What is the Geometric Langlands Conjecture about? How could you best exploit a stream of data flowing by too fast to capture? I think we mathematicians are provoked to ask such questions by our sense that underneath the vastness of mathematics is a fundamental unity allowing us to look into many different corners -- though we couldn't possibly work in all of them. I love the idea of having an expert explain such things to me in a brief, accessible way. And I, like most of us, love common-room gossip. -

President's Report
Newsletter Volume 43, No. 3 • mAY–JuNe 2013 PRESIDENT’S REPORT Greetings, once again, from 35,000 feet, returning home from a major AWM conference in Santa Clara, California. Many of you will recall the AWM 40th Anniversary conference held in 2011 at Brown University. The enthusiasm generat- The purpose of the Association ed by that conference gave rise to a plan to hold a series of biennial AWM Research for Women in Mathematics is Symposia around the country. The first of these, the AWM Research Symposium 2013, took place this weekend on the beautiful Santa Clara University campus. • to encourage women and girls to study and to have active careers The symposium attracted close to 150 participants. The program included 3 plenary in the mathematical sciences, and talks, 10 special sessions on a wide variety of topics, a contributed paper session, • to promote equal opportunity and poster sessions, a panel, and a banquet. The Santa Clara campus was in full bloom the equal treatment of women and and the weather was spectacular. Thankfully, the poster sessions and coffee breaks girls in the mathematical sciences. were held outside in a courtyard or those of us from more frigid climates might have been tempted to play hooky! The event opened with a plenary talk by Maryam Mirzakhani. Mirzakhani is a professor at Stanford and the recipient of multiple awards including the 2013 Ruth Lyttle Satter Prize. Her talk was entitled “On Random Hyperbolic Manifolds of Large Genus.” She began by describing how to associate a hyperbolic surface to a graph, then proceeded with a fascinating discussion of the metric properties of surfaces associated to random graphs. -

What Are Lyapunov Exponents, and Why Are They Interesting?
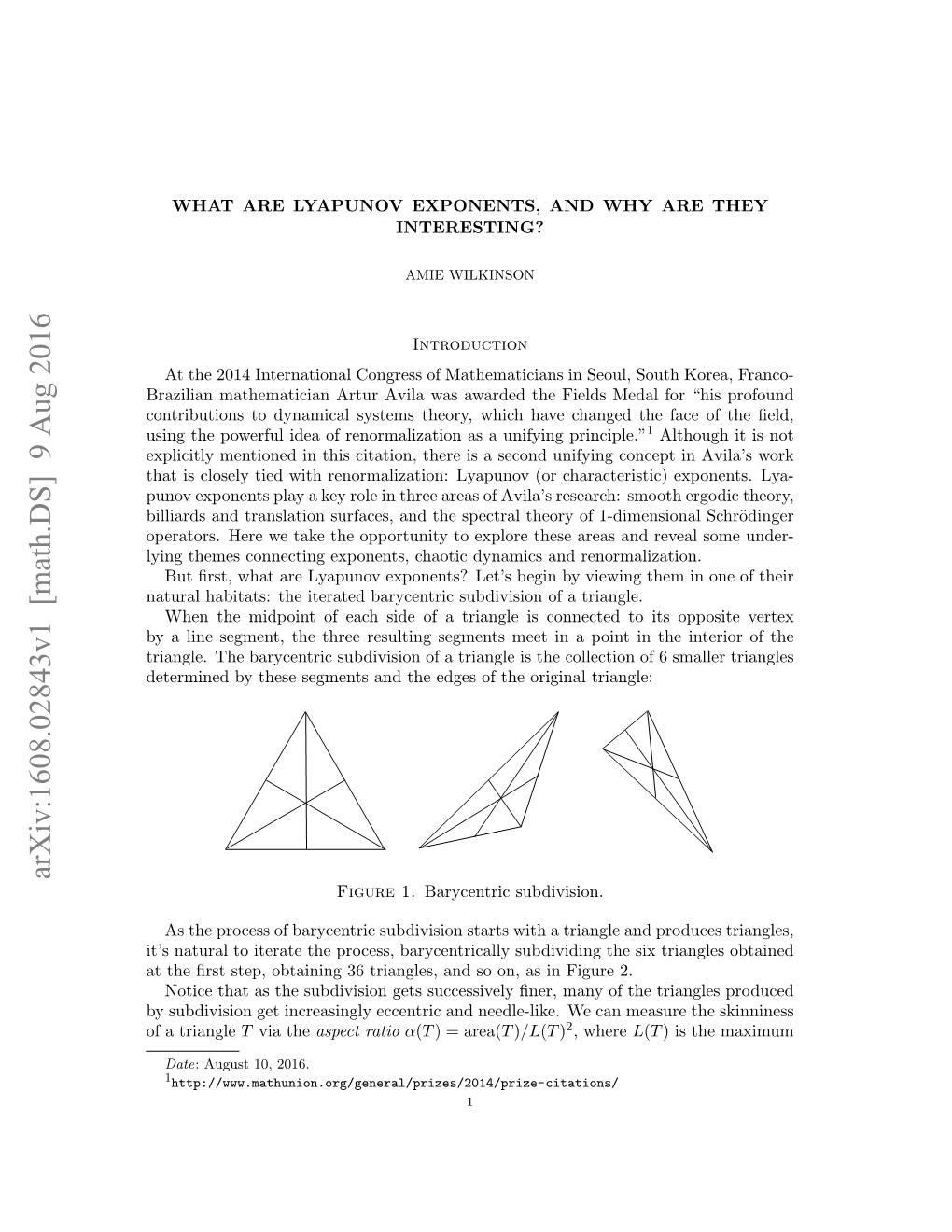
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 54, Number 1, January 2017, Pages 79–105 http://dx.doi.org/10.1090/bull/1552 Article electronically published on September 6, 2016 WHAT ARE LYAPUNOV EXPONENTS, AND WHY ARE THEY INTERESTING? AMIE WILKINSON Introduction At the 2014 International Congress of Mathematicians in Seoul, South Korea, Franco-Brazilian mathematician Artur Avila was awarded the Fields Medal for “his profound contributions to dynamical systems theory, which have changed the face of the field, using the powerful idea of renormalization as a unifying principle.”1 Although it is not explicitly mentioned in this citation, there is a second unify- ing concept in Avila’s work that is closely tied with renormalization: Lyapunov (or characteristic) exponents. Lyapunov exponents play a key role in three areas of Avila’s research: smooth ergodic theory, billiards and translation surfaces, and the spectral theory of 1-dimensional Schr¨odinger operators. Here we take the op- portunity to explore these areas and reveal some underlying themes connecting exponents, chaotic dynamics and renormalization. But first, what are Lyapunov exponents? Let’s begin by viewing them in one of their natural habitats: the iterated barycentric subdivision of a triangle. When the midpoint of each side of a triangle is connected to its opposite vertex by a line segment, the three resulting segments meet in a point in the interior of the triangle. The barycentric subdivision of a triangle is the collection of 6 smaller triangles determined by these segments and the edges of the original triangle: Figure 1. Barycentric subdivision. Received by the editors August 2, 2016. -

Stable Accessibility Is C1 Dense
Stable accessibility is C1 dense Dmitry Dolgopyat and Amie Wilkinson August 27, 2003 Abstract We prove that in the space of all C r (r ≥ 1) partially hyperbolic diffeomorphisms, there is a C 1 open and dense set of accessible dif- feomorphisms. This settles the C 1 case of a conjecture of Pugh and Shub. The same result holds in the space of volume preserving or symplectic partially hyperbolic diffeomorphisms. Combining this theorem with results in [Br], [Ar] and [PugSh3], we obtain several corollaries. The first states that in the space of volume preserving or symplectic partially hyperbolic diffeomorphisms, topological transitivity holds on an open and dense set. Further, on a symplectic n-manifold (n ≤ 4) the C 1-closure of the stably transitive symplectomorphisms is precisely the closure of the partially hyperbolic symplectomorphisms. Finally, stable ergodicity is C 1 open and dense among the volume preserving, partially hyperbolic diffeomorphisms satisfying the additional technical hypotheses of [PugSh3] . Introduction This paper is about the accessibility property of partially hyperbolic diffeo- morphisms. We show that accessibility holds for a C1 open and dense set in the space of all partially hyperbolic diffeomorphisms, thus settling the C1 version of a conjecture of Pugh and Shub [PugSh1]. Partially hyper- bolic diffeomorphisms are similar to Anosov diffeomorphisms, in that they possess invariant hyperbolic directions, but unlike Anosov diffeomorphisms, they can also possess invariant directions of non-hyperbolic behavior. Ac- cessibility means that the hyperbolic directions fill up the manifold on a macroscopic scale. Accessibility often provides enough hyperbolicity for a 1 variety of chaotic properties, such as topological transitivity [Br] and ergod- icity [PugSh3], to hold. -

Press Release
Press release 13 August 2014 Two Fields Medals 2014 awarded to ERC laureates The 2014 Fields Medals were awarded today to four outstanding mathematicians, of whom two are grantees of the European Research Council (ERC): Prof. Artur Avila (Brazil-France), an ERC Starting grant holder since 2010, and Prof. Martin Hairer (Austria) has been selected for funding under an ERC Consolidator grant in 2013. They received the prize respectively for their work on dynamical systems and probability, and on stochastic analysis. The other two laureates are Prof. Manjul Barghava (Canada-US) and Prof. Maryam Mirzakhani (Iran). The Medals were announced at the International Congress of Mathematicians (ICM) taking place from 13 – 21 August in Seoul, South Korea. On the occasion of the announcement, ERC President Prof. Jean-Pierre Bourguignon, a mathematician himself, said: “On behalf of the ERC Scientific Council, I would like to congratulate warmly all four Fields Medallists for their outstanding contributions to the field of mathematics. My special congratulations go to Artur Avila and Martin Hairer, who are both brilliant scientists supported by the ERC. We are happy to see that their remarkable talent in the endless frontiers of science has been recognised. The Fields Medals awarded today are also a sign that the ERC continues to identity and fund the most promising researchers across Europe; this is true not only in mathematics but in all scientific disciplines.” EU Commissioner for Research, Innovation and Science, Máire Geoghegan-Quinn, said: “I would like to congratulate the four laureates of the Fields Medal announced today. The Fields Medal, the highest international distinction for young mathematicians, is a well- deserved honour for hardworking and creative young researchers who push the boundaries of knowledge. -

Learning from Fields Medal Winners
TechTrends DOI 10.1007/s11528-015-0011-6 COLUMN: RETHINKING TECHNOLOGY & CREATIVITY IN THE 21ST CENTURY Creativity in Mathematics and Beyond – Learning from Fields Medal Winners Rohit Mehta1 & Punya Mishra1 & Danah Henriksen2 & the Deep-Play Research Group # Association for Educational Communications & Technology 2016 For mathematicians, mathematics—like music, poetry, advanced mathematics through their work in areas as special- or painting—is a creative art. All these arts involve— ized and diverse as dynamical systems theory, the geometry of and indeed require—a certain creative fire. They all numbers, stochastic partial differential equations, and the dy- strive to express truths that cannot be expressed in ordi- namical geometry of Reimann surfaces. nary everyday language. And they all strive towards An award such as the Fields Medal is a recognition of beauty — Manjul Bhargava (2014) sustained creative effort of the highest caliber in a challenging Your personal life, your professional life, and your cre- domain, making the recipients worthy of study for scholars ative life are all intertwined — Skylar Grey interested in creativity. In doing so, we continue a long tradi- tion in creativity research – going all the way back to Galton in Every 4 years, the International Mathematical Union rec- the 19th century – of studying highly accomplished individ- ognizes two to four individuals under the age of 40 for their uals to better understand the nature of the creative process. We achievements in mathematics. These awards, known as the must point out that the focus of creativity research has shifted Fields Medal, have often been described as the “mathemati- over time, moving from an early dominant focus on genius, cian’s Nobel Prize” and serve both a form of peer-recognition towards giftedness in the middle of the 20th century, to a more of highly influential and creative mathematical work, as well contemporary emphasis on originality of thought and work as an encouragement of future achievement. -

Read Press Release
The Work of Artur Avila Artur Avila has made outstanding contributions to dynamical systems, analysis, and other areas, in many cases proving decisive results that solved long-standing open problems. A native of Brazil who spends part of his time there and part in France, he combines the strong mathematical cultures and traditions of both countries. Nearly all his work has been done through collaborations with some 30 mathematicians around the world. To these collaborations Avila brings formidable technical power, the ingenuity and tenacity of a master problem-solver, and an unerring sense for deep and significant questions. Avila's achievements are many and span a broad range of topics; here we focus on only a few highlights. One of his early significant results closes a chapter on a long story that started in the 1970s. At that time, physicists, most notably Mitchell Feigenbaum, began trying to understand how chaos can arise out of very simple systems. Some of the systems they looked at were based on iterating a mathematical rule such as 3x(1−x). Starting with a given point, one can watch the trajectory of the point under repeated applications of the rule; one can think of the rule as moving the starting point around over time. For some maps, the trajectories eventually settle into stable orbits, while for other maps the trajectories become chaotic. Out of the drive to understand such phenomena grew the subject of discrete dynamical systems, to which scores of mathematicians contributed in the ensuing decades. Among the central aims was to develop ways to predict long-time behavior. -

On the Ergodicity of Partially Hyperbolic Systems
ANNALS OF MATHEMATICS On the ergodicity of partially hyperbolic systems By Keith Burns and Amie Wilkinson SECOND SERIES, VOL. 171, NO. 1 January, 2010 anmaah Annals of Mathematics, 171 (2010), 451–489 On the ergodicity of partially hyperbolic systems By KEITH BURNS and AMIE WILKINSON Abstract Pugh and Shub have conjectured that essential accessibility implies ergodicity for a C 2, partially hyperbolic, volume-preserving diffeomorphism. We prove this conjecture under a mild center bunching assumption, which is satisfied in particular by all partially hyperbolic systems with 1-dimensional center bundle. We also 1 ı obtain ergodicity results for C C partially hyperbolic systems. Introduction In[Hop39], Eberhard Hopf introduced a simple argument that proved the ergodicity (with respect to Liouville measure) of the geodesic flow of a compact, negatively curved surface. The argument has since been applied to increasingly general classes of dynamical systems. The key feature that these systems possess is hyperbolicity. The strongest form of hyperbolicity is uniform hyperbolicity. A diffeomorphism f M M of a compact manifold M is uniformly hyperbolic or W ! Anosov if there exists a splitting of the tangent bundle into Tf -invariant subbundles, given by TM Es Eu; D ˚ and a continuous Riemannian metric such that, for every unit vector v TM , 2 Tf v < 1 if v Es; k k 2 Tf v > 1 if v Eu: k k 2 Anosov flows are defined similarly, with Es Eu complementary to the bundle ˚ E0 that is tangent to the flow direction. The bundles Es and Eu of an Anosov system are tangent to the stable and unstable foliations ᐃs and ᐃu, respectively. -

Rev. Acad. Colomb. Cienc. Ex. Fis. Nat. 41(160):399-400, Julio-Septiembre De 2017
Rev. Acad. Colomb. Cienc. Ex. Fis. Nat. 41(160):399-400, julio-septiembre de 2017 400 ISSN 0370-3908 eISSN 2382-4980 Academia Colombiana de Ciencias Exactas, Físicas y Naturales Vol. 41 • Número 160 • Págs. 269-412 • Julio - Septiembre de 2017 · Bogotá - Colombia Comité editorial Editora Elizabeth Castañeda, Ph. D. Instituto Nacional de Salud, Bogotá, Colombia Editores asociados Ciencias Biomédicas Ciencias Físicas Luis Fernando García, M.D., M.Sc. Pedro Fernández de Córdoba, Ph. D. Universidad de Antioquia, Medellin, Colombia Universidad Politécnica de Valencia, España Gustavo Adolfo Vallejo, Ph. D. Diógenes Campos Romero, Dr. rer. nat. Universidad del Tolima, Ibagué, Colombia Universidad Nacional de Colombia, Luis Caraballo, Ph. D. Bogotá, Colombia Universidad de Cartagena, Cartagena, Colombia Román Eduardo Castañeda, Dr. rer. nat. Juanita Ángel, Ph. D. Universidad Nacional, Medellín, Colombia Pontificia Universidad Javeriana, María Elena Gómez, Doctor Bogotá, Colombia Universidad del Valle, Cali Manuel Franco, Ph. D. Gabriel Téllez, Ph. D. Pontificia Universidad Javeriana, Bogotá, Colombia Universidad de los Andes, Bogotá, Colombia Alberto Gómez, Ph. D. Jairo Roa-Rojas, Ph. D. Pontificia Universidad Javeriana, Universidad Nacional de Colombia, Bogotá, Colombia Bogotá, Colombia John Mario González, Ph. D. Ángela Stella Camacho Beltrán, Dr. rer. nat. Universidad de los Andes, Bogotá, Colombia Universidad de los Andes, Bogotá, Colombia Ciencias del Comportamiento Hernando Ariza Calderón, Doctor Guillermo Páramo, M.Sc. Universidad del Quindío, Armenia, Colombia Universidad Central, Bogotá, Colombia Edgar González, Ph. D. Rubén Ardila, Ph. D. Pontificia Universidad Javeriana, Universidad Nacional de Colombia, Bogotá, Colombia Bogotá, Colombia Guillermo González, Ph. D. Fernando Marmolejo-Ramos, Ph. D. Universidad Industrial de Santander, Universidad de Adelaide, Adelaide, Australia Bucaramanga, Colombia Ciencias Naturales Ligia Sierra, Ph. -

Januar 2007 FØRSTE DOKTORGRAD I
INFOMATJanuar 2007 Kjære leser! FØRSTE DOKTORGRAD I INFOMAT ønsker alle et godt nytt år. MATEMATIKKDIDAKTIKK Det ble aldri noe desember- nummer. Redaktørens harddisk VED HiA hadde et fatalt sammenbrudd like før Jul og slike hendelser er altså nok til at enkelte ting stopper opp. Våre utmerkede dataingeniører ved Matematisk institutt i Oslo klarte å redde ut alle dataene, og undertegnede lærte en lekse om back-up. Science Magazine har kåret beviset for Poincaré-formod- ningen til årets vitenskapelige gjennombrudd i 2006. Aldri før har en matematikkbegiven- het blitt denne æren til del. Men Foto: Torstein Øen hyggelig er det og det er et vik- tig signal om at det ikke bare er Den 27. november disputerte indiske Sharada Gade for doktorgraden anvendt vitenskap som er be- i matematikk-didaktikk ved Høgskolen i Agder. Dette er den første tydningsfullt for samfunnet. matematikkdidaktikk-doktoren høgskolen har kreert etter at studiet ble HiA har fått kreert sin første opprettet i 2002. doktor i matematikkdidaktikk og er på full fart mot universi- Dermed er et viktig krav for å ta steget opp i universitetsklassen opp- tetsstatus! Vi gratulerer både fylt. HiA må levere doktorgrader i andre fag enn nordisk og det sørget høgskolen og den nye doktoren Sharada Gade for. Hennes avhandling dreier seg om viktigheten av Sharada Gade. mening, mål og lærerens rolle i matematikkundervisningen. hilsen Arne B. INFOMAT kommer ut med 11 nummer i året og gis ut av Norsk Matematisk Forening. Deadline for neste utgave er alltid den 10. i neste måned. Stoff til INFOMAT sendes til infomat at math.ntnu.no Foreningen har hjemmeside http://www.matematikkforeningen.no/INFOMAT Ansvarlig redaktør er Arne B.