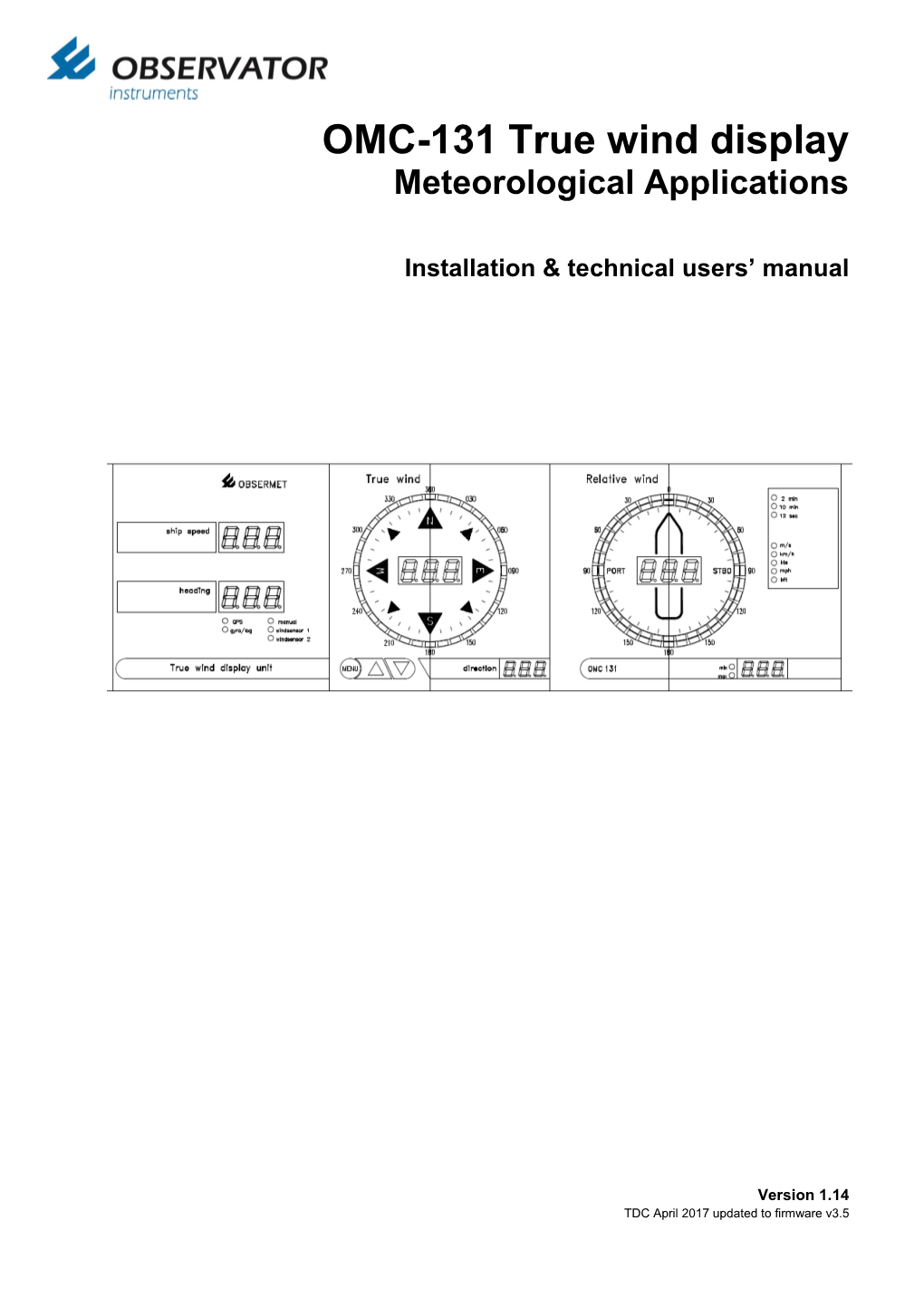
OMC-131 True Wind Display Meteorological Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Event Information, Policies, and Agreements
Bow to Stern Boating Event Information, Policies, and Agreements This document includes: General Information, Policies, Procedures, Agreement Statements, and Waivers For the Following Events: Rental/Charter, ASA Certification/Lesson, Day Camp, and Other Program. Contact Bow to Stern if you have any questions concerning this information. Updated: March 18, 2021 Table of Contents General Information ............................................................................................................................................. 4 Registration ................................................................................................................................................................... 4 What to Bring ................................................................................................................................................................ 4 Overnight Rentals/Charters/Lessons ............................................................................................................................ 4 Captain and Vessel Check-In/Out Procedures ........................................................................................................ 4 Captain Check-In ............................................................................................................................................................ 4 Captain Check-In Times ................................................................................................................................................. 4 -
Skilful Vessel Handling
Skilful Vessel Handling Capt. Øystein Johnsen MNI Buskerud and Vestfold University College March 2014 Manoeuvring of vessels that are held back by an external force This consideration is written in belated wisdom according to the accident of Bourbon Dolphin in April 2007 When manoeuvring a vessel that are held back by an external force and makes little or no speed through the water, the propulsion propellers run up to the maximum, and the highest sideways force might be required against wind, waves and current. The vessel is held back by 1 800 meters of chain and wire, weight of 300 tons. 35 knops wind from SW, waves about 6 meter and 3 knops current heading NE has taken her 840 meters to the east (stb), out of the required line of bearing for the anchor. Bourbon Dolphin running her last anchor. The picture is taken 37 minutes before capsizing. The slip streams tells us that all thrusters are in use and the rudders are set to port. (Photo: Sean Dickson) 2 Lack of form stability I Emil Aall Dahle It is Aall Dahle’s opinion that the whole fleet of AHT/AHTS’s is a misconstruction because the vessels are based on the concept of a supplyship (PSV). The wide open after deck makes the vessels very vulnerable when tilted. When an ordinary vessel are listing an increasingly amount of volume of air filled hull is forced down into the water and create buoyancy – an up righting (rectification) force which counteract the list. Aall Dahle has a doctorate in marine hydrodynamics, has been senior principle engineer in NMD and DNV. -

Selene 45 Classic Explorer
Tel: +64 9 377 3328 Fax: +64 9 377 3325 info@yachtfindersglobal.co.nz Selene 45 Classic Explorer Description General The Selene 45 is an entirely new Next Year: 2022 Generation Selene. She is the smallest model of the popular and proven Selene Pilothouse Price: $1,254,732 Trawler line. Unlike her predecessor, the galley Additional Charges: None on the Selene 45 is offset to starboard providing Boat Type: Power a more spacious and accommodating salon. The pilothouse settee is L-shaped and also offset to Displacement Hull Type: starboard. There is room for a small helm chair Motoryacht www.yachtfindersglobal.co.nz in... Location: New Boat Engine/Fuel: Diesel Hull Material: GRP Dimensions Engines Length: 45 ft No. of Engines: 1 LOA: 14.76m Cummins or John Engine Brand: Deere Beam: 4.78m Engine(s) HP: 230 Draft: 1.59m Cruising Speed: 9 Knots Displacement: 62,830 lbs Max Speed: 10 Knots Builder / Designer Tankage Builder: Jet Tern Marine Fuel: 3785 Litres Designer: Howard Chen Water: 870 Litres Holding: Yes 1 2 Cook Gelcoat for hull, deck, superstructure & Manship S/S #316 opening portlights non-skid Manship S/S #316 hatches for pilothouse & fwd. Vinylester resin for the first 4 layers lamination stateroom Cymax bi-axis uni-direction stitched roving / mat Diamond/Sea-Glaze Dutch doors for pilothouse P&S, saloon entrance Taiwan Glass mat Taco S/S #316 solid upper & lower dual fender Divinycell core sandwich structure for hull side rails shell above the waterline & superstructure S/S #316 handrail for foredeck & dinghy deck Longitudinal stringers & transverse frames system S/S #316 telescope swim ladder 4 watertight bulkheads ( chain locker, fwd. -

After 88 Years - Four-Masted Barque PEKING Back in Her Homeport Hamburg
Four-masted barque PEKING - shifting Wewelfsfleth to Hamburg - September 2020 After 88 Years - Four-masted Barque PEKING Back In Her Homeport Hamburg Four-masted barque PEKING - shifting Wewelfsfleth to Hamburg - September 2020 On February 25, 1911 - 109 years ago - the four-masted barque PEKING was launched for the Hamburg ship- ping company F. Laeisz at the Blohm & Voss shipyard in Hamburg. The 115-metres long, and 14.40 metres wide cargo sailing ship had no engine, and was robustly constructed for transporting saltpetre from the Chilean coast to European ports. The ship owner’s tradition of naming their ships with words beginning with the letter “P”, as well as these ships’ regular fast voyages, had sailors all over the world call the Laeisz sailing ships “Flying P-Liners”. The PEKING is part of this legendary sailing ship fleet, together with a few other survivors, such as her sister ship PASSAT, the POMMERN and PADUA, the last of the once huge fleet which still is in active service as the sail training ship KRUZENSHTERN. Before she was sold to England in 1932 as stationary training ship and renamed ARETHUSA, the PEKING passed Cape Horn 34 times, which is respected among seafarers because of its often stormy weather. In 1975 the four-master, renamed PEKING, was sold to the USA to become a museum ship near the Brooklyn Bridge in Manhattan. There the old ship quietly rusted away until 2016 due to the lack of maintenance. -Af ter returning to Germany in very poor condition in 2017 with the dock ship COMBI DOCK III, the PEKING was meticulously restored in the Peters Shipyard in Wewelsfleth to the condition she was in as a cargo sailing ship at the end of the 1920s. -
Course Objectives Chapter 2 2. Hull Form and Geometry
COURSE OBJECTIVES CHAPTER 2 2. HULL FORM AND GEOMETRY 1. Be familiar with ship classifications 2. Explain the difference between aerostatic, hydrostatic, and hydrodynamic support 3. Be familiar with the following types of marine vehicles: displacement ships, catamarans, planing vessels, hydrofoil, hovercraft, SWATH, and submarines 4. Learn Archimedes’ Principle in qualitative and mathematical form 5. Calculate problems using Archimedes’ Principle 6. Read, interpret, and relate the Body Plan, Half-Breadth Plan, and Sheer Plan and identify the lines for each plan 7. Relate the information in a ship's lines plan to a Table of Offsets 8. Be familiar with the following hull form terminology: a. After Perpendicular (AP), Forward Perpendiculars (FP), and midships, b. Length Between Perpendiculars (LPP or LBP) and Length Overall (LOA) c. Keel (K), Depth (D), Draft (T), Mean Draft (Tm), Freeboard and Beam (B) d. Flare, Tumble home and Camber e. Centerline, Baseline and Offset 9. Define and compare the relationship between “centroid” and “center of mass” 10. State the significance and physical location of the center of buoyancy (B) and center of flotation (F); locate these points using LCB, VCB, TCB, TCF, and LCF st 11. Use Simpson’s 1 Rule to calculate the following (given a Table of Offsets): a. Waterplane Area (Awp or WPA) b. Sectional Area (Asect) c. Submerged Volume (∇S) d. Longitudinal Center of Flotation (LCF) 12. Read and use a ship's Curves of Form to find hydrostatic properties and be knowledgeable about each of the properties on the Curves of Form 13. Calculate trim given Taft and Tfwd and understand its physical meaning i 2.1 Introduction to Ships and Naval Engineering Ships are the single most expensive product a nation produces for defense, commerce, research, or nearly any other function. -

Why Consider Inverted Bows on Military Ships Or Why
ATMA 2018 WHY CONSIDER INVERTED BOWS ON MILITARY SHIPS? OR WHY NOT ? Philippe GOUBAULT Naval Group – Direction of Innovation and Technical Expertise – Bouguenais (France) Stéphane LE PALLEC, Yann FLOCH Naval Group – Surface Ship Design Department – Lorient (France) SOMMAIRE La forme des étraves des navires a connu de nombreuses évolutions au cours de l’histoire de la construction navale. Ces évolutions suivent en général l’avènement de nouveaux besoins ou de nouvelles connaissances. L’industrie navale est cependant très conservatrice, ce qui tend à ralentir des évolutions significatives. Ceci s’applique en particulier au cas des étraves discutées dans ce papier. Dans les dernières 50 -70 ans, ce qui est assez court dans l’échelle de l’histoire, les étraves des navires ont évolué pour intégrer un dévers assez important afin de mieux surmonter les vagues lors d’opérations sur mer forte. L’action de ces étraves tend à disperser les embruns sur les côtés et produire des forces de rappel afin d’éviter l’enfournement de l’avant sous la vague. Cela a marqué une amélioration par rapport aux étraves assez droites des navires avant cette période. On assiste cependant depuis le début des années 90 à une recrudescence des designs de navires avec des étraves droites ou inversées. Il est légitime de se demander ce que cela apporte et quel risque prend on le cas échéant en adoptant ce changement. Naval Group s’est lancé depuis une dizaine d’année dans un programme complet d’études et d’essais afin de déterminer l’intérêt et les conditions de succès d’un design avec une étrave inversée. -

GNX™ Wind Owner's Manual
GNX™ Wind Owner’s Manual © 2016 Garmin Ltd. or its subsidiaries All rights reserved. Under the copyright laws, this manual may not be copied, in whole or in part, without the written consent of Garmin. Garmin reserves the right to change or improve its products and to make changes in the content of this manual without obligation to notify any person or organization of such changes or improvements. Go to www.garmin.com for current updates and supplemental information concerning the use of this product. Garmin®, the Garmin logo, and quatix® are trademarks of Garmin Ltd. or its subsidiaries, registered in the USA and other countries. GNX™ is a trademark of Garmin Ltd. or its subsidiaries. These trademarks may not be used without the express permission of Garmin. NMEA 2000® and the NMEA 2000 logo are registered trademarks of the National Marine Electronics Association. Table of Contents Getting Started............................................................... 1 Keys............................................................................................ 1 Instrument Screen...................................................................... 1 Viewing Sensor Information........................................................ 1 Wind Rose............................................................................. 1 Steer-Pilot Mode............................................................. 2 Using Steer-Pilot Mode with the AWA or TWA Setting............... 2 Using Steer-Pilot Mode with the BTW or CTS Setting................ 2 Using -

Parts of a Ship: the Basics
Parts of a Ship: The Basics PORT SIDE MAIN FORE MAIN WINDLASS STERN AFT BOW TILLER MAST MAST HATCH HATCH STARBOARD SIDE Overhead view of the schooner Sultana he front of a ship is called the bow, and the back is called the stern. If you were standing T on the ship’s deck looking forward (towards the bow), the left side would be the port side and the right side would be the starboard side. Close to Sultana’s stern is the tiller, a long stick attached to a device called a rudder used for steering the ship. Other important items include the main mast, the fore mast and the windlass (a large simple machine used for pulling up the anchor). POOP DECK QUARTER DECK MIDDLE DECK FORE DECK MAIN TILLER HATCH ultana’s deck is divided into four sections. At the front of the ship is the fore deck, where S the anchors are stored and the fore mast is located. The largest section of the ship is the middle deck where the main hatch is located. Historically, this is where cargo would have been loaded and unloaded. Towards the ship’s stern is the quarter deck. On larger ships, only the high ranking officers were allowed to stand in this area. Sultana’s smallest deck is the poop deck, where sailors steered with the tiller. Parts of a Ship: The Basics NAME: ____________________________________________ DATE: ____________ DIRECTIONS: Use information from the reading to answer each of the following questions in a complete sentence. 1. What is the front of a ship called? What do you call the back end of a ship? 2. -

The MAROB Voluntary Marine Observation Program
The MAROB Voluntary Marine Observation Program (With instructions specific for sending MAROBs via the QTH Reporter webform) All Information with Respect to the MAROB Program is Preliminary and Subject to Revision What is the MAROB Program? The MAROB Program is an experimental voluntary marine observation program of the National Weather Service in the early stages of development. It seeks the participation of all mariners, both commercial and recreational, which are not part of the more in-depth Voluntary Observing Ship (VOS) program. It is the goal of the program to collect as many marine observations as practicable, to improve the accuracy of coastal, offshore and high seas forecasts, by taking advantage of technological advancements in marine communications and the proliferation of the Internet. Who May Participate in the MAROB Program? Any mariner is welcome to participate in the MAROB program. However, we ask that commercial vessels, which are routinely underway, consider participating in the international Voluntary Observing Ship (VOS) program, see www.vos.noaa.gov or call 1-228-688-1457 for information. I Have Some Concern about Piracy or my Competition If you have some concern about piracy or your competition (e.g. while racing or fishing) you should likely not participate in a voluntary vessel position or weather reporting system such as MAROB where your position is widely disseminated and may become known to others. Where some degree anonymity is desired, use the identity "SHIP" in your report. Never enter a report with a false position What Training is Required to Participate in MAROB? At present, no training is required to participate in the MAROB Program. -

THE DELAWARE V. the OSPREY. [2 Wall
YesWeScan: The FEDERAL CASES Case No. 3,763. THE DELAWARE V. THE OSPREY. [2 Wall. Jr. 268;11 Am. Law Reg. 15; 1 Phila. 358, 401; 27 Hunt, Mer. Mag. 589; 9 Leg. Int. 82, 130; 4 Am. Law J. (N. S.) 533.] Circuit Court, E. D. Pennsylvania. Sept. Term, 1852. COLLISION AT NIGHT—STEAMER AND SAILING VESSEL—SIGNAL LIGHTS. 1. Although the court cannot establish a rule to bind vessels navigating the high seas to carry signal lights, yet where one vessel does so and another does not, the court, in case of a collision, will go some way to treat the dark boat as the wrong doer. [Cited in Baker v. The City of New York, Case No. 705; The Frank Moffatt, Id. 5,660. Explained in Pope v. The B. B. Forbes, Id. 11,275. Distinguished in The Hypodame, 6 Wall. (73 U. S.) 225.] 2. The court going in advance of hitherto adjudicated cases, would seem to enforce the obligation upon all boats navigating bays and rivers, not only to show lights on an approach, but to carry them constantly. [Cited in The City of Savannah, 41 Fed. 893.] The steamer Osprey was on her way to sea, out of Delaware bay, with three signal lanterns in place, heading for the lights of Cape Henlopen, on the west. The barque Delaware, without any lights, came into the capes with the wind free to pass up the bay, and the tide against her. When at some distance from the steamer, the sails of the barque shut out the Cape Henlopen lights from the pilot of the steamer, and from this fact the pilot inferred a sailing vessel was between him and them, and of course, that the sailing vessel was heading to starboard of the steamer. -

True Wind Angle
User’s Guide by TrueWind David Burch About TrueWind...................................................................2 How to use TrueWind...........................................................3 Definitions Wind direction............................................................4 Apparent wind............................................................4 Apparent wind angle..................................................4 Apparent wind speed.................................................. 5 True wind angle.......................................................... 5 True wind speed ......................................................... 5 Speed .......................................................................... 6 Heading ...................................................................... 6 Discussion Telltales ...................................................................... 7 Electronic wind instruments....................................... 7 True wind versus apparent wind ................................ 8 Tips, tricks, and special cases .................................... 8 How to find true wind Reading the water....................................................... 9 Formulas and diagrams .............................................. 10 Graphical method ....................................................... 12 2 Starpath TrueWind INDEX About Starpath TrueWind Starpath TrueWind is a Windows program designed to compute very conveniently true wind from apparent wind for use in maneuvering and weather analysis. -

The Significance of Keel Laying
The Significance of Keel Laying By Colin Darlington 2018-10-14 18:45:01 The laying of the keel of a ship is one of the significant dates in that ship’s life. The date in effect marks the birth of the ship. It had been years since there was a keel laid for a ship of the Royal Canadian Navy, until, on June 9, 2016, the keel was laid for what will become HMCS Harry DeWolf, first of the patrol ships of the Arctic and Offshore Patrol Ship (AOPS) project. This event was the first of a number of traditional naval ceremonies in the coming years as the Royal Canadian Navy obtains ships under the National Shipbuilding Strategy. The keel of a ship is the “primary fore-and-aft part of a ship’s frame. It runs along the bottom connecting the stem and the stern.” In a wooden or older steel ship, the keel extends the whole length of the vessel. Attached to it are the stem (the foremost steel part forming the bow), sternpost (the upright structural member at the stern) and the ribs of the vessel. This definition reflects how ships were customarily built. 1 Nowadays a ship may be built of modules, or blocks, fabricated separately with fittings and equipment inside, then brought together to form the hull and superstructure of the ship. In the case of the patrol vessels, each is composed of three mega- blocks made up from a total of 62 smaller blocks. It can be the lowering of part or whole of a large block onto a cradle on the building ways that is the “keel laying” for a modern naval vessel.