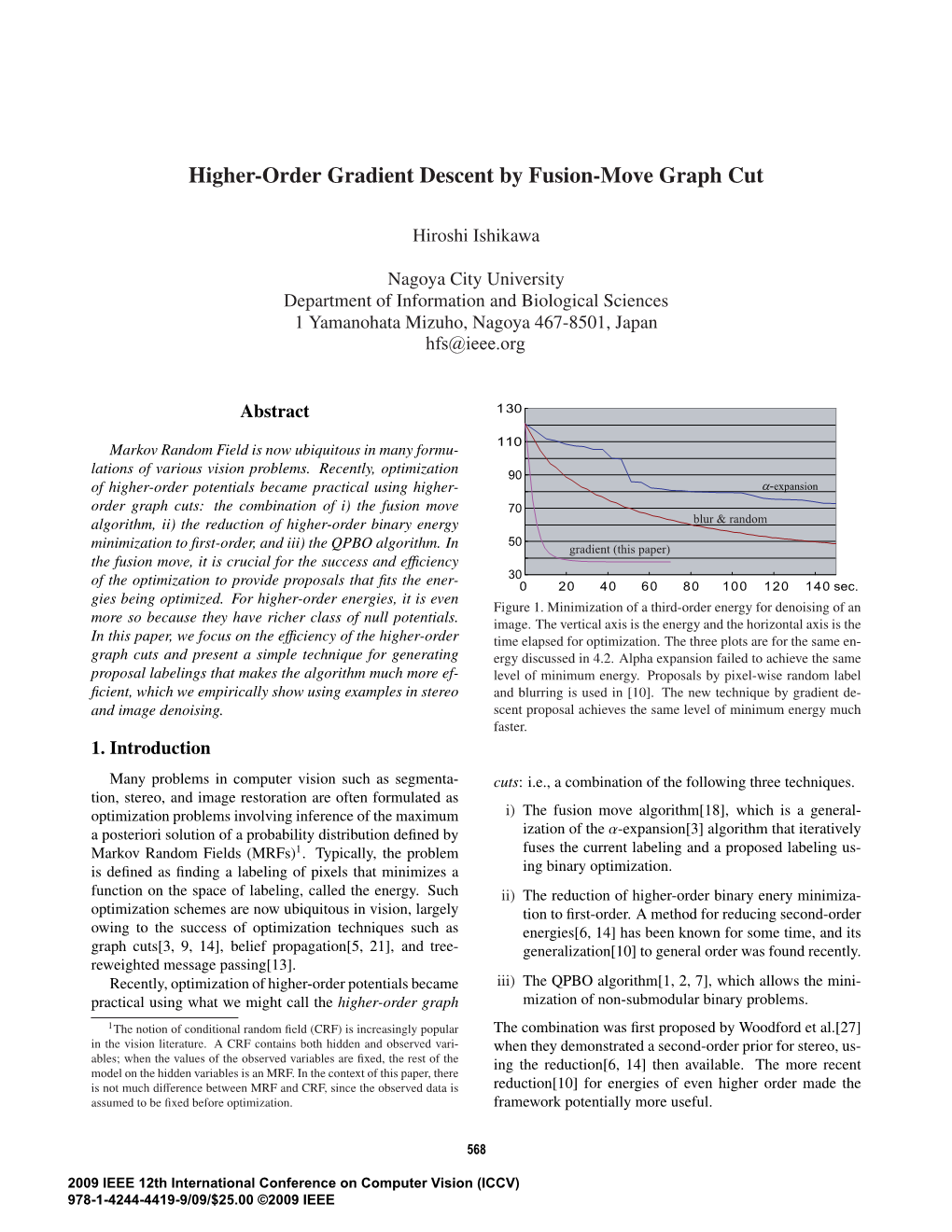
Higher-Order Gradient Descent by Fusion-Move Graph Cut
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

“Graph Cut Based Image Segmentation Using Statistical Priors and Its
“GRAPH CUT BASED IMAGE SEGMENTATION USING STATISTICAL PRIORS AND ITS APPLICATION TO OBJECT DETECTION AND THIGH CT TISSUE IDENTIFICATION ANALYSIS” by TAPOSH BISWAS A THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in the Natural Resources Graduate Program of Delaware State University DOVER, DELAWARE May 2018 This thesis is approved by the following members of the Final Oral Review Committee: Dr. Sokratis Makrogiannis, Committee Chairperson, Department of Mathematical Science, Delaware State University Dr. Thomas A. Planchon, Committee Member, Department of Physics and Engineering, Delaware State University Dr. Qi Lu, Committee Member, Department of Physics and Engineering, Delaware State University Dr. Matthew Tanzy, External Committee Member, Department of Mathematical Science, Delaware State University COPYRIGHT Copyright ©2018 by Taposh Biswas. All rights reserved. DEDICATION This thesis is dedicated to my parents Monoranjan Biswas and Dipti Biswas who have supported curiosity throughout my life. Without their persistent guidance, support, and advice, the successes I have achieved till now would never have come to fruition. ii ACKNOWLEDGEMENTS First, I would like to thank Dr. Sokratis Makrogiannis for giving me the opportunity to be a part of his research group (MIVIC) and supporting me through my thesis. It is an honor to work with him; he was always there for helping me improve my programming skills and assisting me with my research. I really appreciate his contributions of time, ideas and funding to complete my master’s degree. His door was always to discuss about any problem. I would like to thank the Federal Research and Development Matching Grant Program of the Delaware Economic Development Office (DEDO) for the funding and giving me the opportunity to complete my degree. -

Random Fields for Image Registration
Computer Aided Medical Procedures Prof. Dr. Nassir Navab Dissertation Random Fields for Image Registration Benjamin M. Glocker Fakultät für Informatik Technische Universität München TECHNISCHE UNIVERSITÄT MÜNCHEN Computer Aided Medical Procedures & Augmented Reality / I16 Random Fields for Image Registration Benjamin M. Glocker Vollständiger Abdruck der von der Fakultät für Informatik der Technischen Universität München zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften (Dr. rer. nat.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr. Peter O. A. Struss Prüfer der Dissertation: 1. Univ.-Prof. Dr. Nassir Navab 2. Prof. Dr. Nikos Paragios, Ecole Centrale de Paris / Frankreich Die Dissertation wurde am 09.09.2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Informatik am 16.05.2011 angenommen. Abstract Image registration is one of the key components in computer vision and medical image analysis. Motion compensation, multi-modal fusion, atlas matching, image stitching, or optical flow estimation are only some of the applications where efficient registration methods are needed. The task of registration is to recover a spatial transformation which aligns corresponding structures visible in the images. This is commonly formulated as an optimization problem based on an objective function which evaluates the quality of a transformation with respect to the image data and some prior information. So far, mainly classical continuous methods have been considered for the critical part of optimization. In this thesis, discrete labeling of random fields is introduced as a novel promising and powerful alternative. A general framework is derived which allows to represent both linear and non-linear image registration as labeling problems where random variables play the role of transformation parameters. -

Pylon Model for Semantic Segmentation
A Pylon Model for Semantic Segmentation Victor Lempitsky Andrea Vedaldi Andrew Zisserman Visual Geometry Group, University of Oxford∗ fvilem,vedaldi,[email protected] Abstract Graph cut optimization is one of the standard workhorses of image segmentation since for binary random field representations of the image, it gives globally optimal results and there are efficient polynomial time implementations. Often, the random field is applied over a flat partitioning of the image into non-intersecting elements, such as pixels or super-pixels. In the paper we show that if, instead of a flat partitioning, the image is represented by a hierarchical segmentation tree, then the resulting energy combining unary and boundary terms can still be optimized using graph cut (with all the corresponding benefits of global optimality and efficiency). As a result of such inference, the image gets partitioned into a set of segments that may come from different layers of the tree. We apply this formulation, which we call the pylon model, to the task of semantic seg- mentation where the goal is to separate an image into areas belonging to different semantic classes. The experiments highlight the advantage of inference on a segmentation tree (over a flat partitioning) and demonstrate that the optimization in the pylon model is able to flex- ibly choose the level of segmentation across the image. Overall, the proposed system has superior segmentation accuracy on several datasets (Graz-02, Stanford background) com- pared to previously suggested approaches. 1 Introduction Semantic segmentation (i.e. the task of assigning each pixel of a photograph to a semantic class label) is often tackled via a “flat” conditional random field model [10, 29]. -

Global Optimization for Image Segmentation with High-Level Priors
Noname manuscript No. (will be inserted by the editor) Branch-and-Mincut: Global Optimization for Image Segmentation with High-Level Priors Victor Lempitsky · Andrew Blake · Carsten Rother the date of receipt and acceptance should be inserted later Abstract Efficient global optimization techniques such 1 Introduction as graph cut exist for energies corresponding to binary image segmentation from low-level cues. However, in- Binary image segmentation is often posed as a graph troducing a high-level prior such as a shape prior or partition problem. This is because efficient graph algo- a color-distribution prior into the segmentation pro- rithms such as st-mincut permit fast global optimiza- cess typically results in an energy that is much harder tion of the functionals measuring the quality of the to optimize. The main contribution of the paper is a segmentation. As a result, difficult image segmentation new global optimization framework for a wide class of problems can be solved efficiently, robustly, and inde- such energies. The framework is built upon two power- pendently of initialization. Yet, while graphs can rep- ful techniques: graph cut and branch-and-bound. These resent energies based on localized low-level cues, they techniques are unified through the derivation of lower are much less suitable for representing non-local cues bounds on the energies. Being computable via graph and priors describing the foreground or the background cut, these bounds are used to prune branches within a segment as a whole. branch-and-bound search. Consider, for example, the situation when the shape of the foreground segment is known a priori to be sim- We demonstrate that the new framework can com- ilar to a particular template (segmentation with shape pute globally optimal segmentations for a variety of seg- priors). -

Spatio-Temporal Video Segmentation with Shape Growth Or Shrinkage Constraint Yuliya Tarabalka, Guillaume Charpiat, Ludovic Brucker, Bjoern Menze
Spatio-Temporal Video Segmentation with Shape Growth or Shrinkage Constraint Yuliya Tarabalka, Guillaume Charpiat, Ludovic Brucker, Bjoern Menze To cite this version: Yuliya Tarabalka, Guillaume Charpiat, Ludovic Brucker, Bjoern Menze. Spatio-Temporal Video Seg- mentation with Shape Growth or Shrinkage Constraint. IEEE Transactions on Image Processing, Institute of Electrical and Electronics Engineers, 2014, 23 (9), pp.3829-3840. hal-01052543 HAL Id: hal-01052543 https://hal.inria.fr/hal-01052543 Submitted on 28 Jul 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 9, SEPTEMBER 2014 3829 Spatio-Temporal Video Segmentation With Shape Growth or Shrinkage Constraint Yuliya Tarabalka, Member, IEEE,GuillaumeCharpiat,LudovicBrucker,andBjoernH.Menze Abstract—We propose a new method for joint segmentation volume [6]–[8]. In this case, the segmentation of the entire of monotonously growing or shrinking shapes in a time sequence image set supports each of the individual segmentations. of noisy images. The task of segmenting the image time series is Graph-based methods gained popularity among omniscient expressed as an optimization problem using the spatio-temporal graph of pixels, in which we are able to impose the constraint approaches, in particular those using hierarchical model [8], of shape growth or of shrinkage by introducing monodirectional normalized cuts [6] or graph cuts [9]. -

A Reduction Method for Graph Cut Optimization Nicolas Lermé, François Malgouyres
A Reduction Method For Graph Cut Optimization Nicolas Lermé, François Malgouyres To cite this version: Nicolas Lermé, François Malgouyres. A Reduction Method For Graph Cut Optimization. Pattern Analysis and Applications, Springer Verlag, 2014, 17 (2), pp.361-378. 10.1007/s10044-013-0337-7. hal-01486804v5 HAL Id: hal-01486804 https://hal.archives-ouvertes.fr/hal-01486804v5 Submitted on 10 Mar 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. PATTERN ANALYSIS AND APPLICATIONS 1 A Reduction Method For Graph Cut Optimization N. Lermé, F. Malgouyres hal-00606921, version 3 - Jul 2012 M. Lermé is with the Laboratoire d’Informatique de Paris Nord, University Paris 13, 99 avenue Jean-Baptiste Clément, 93430 Villetaneuse, France. Phone: +33 (0)1-49-40-32-13. Fax: +33 (0)1-48-26-07-12. E-mail: [email protected] M. Malgouyres is with the Institut Mathématiques de Toulouse, University Paul Sabatier, 118 route de Narbonne, F-31062 Toulouse Cedex 9, France. Phone: +33 (0)5-61-55-85-83. Fax: +33 (0)5-61-55-75-99. E-mail: [email protected] toulouse.fr July 3, 2012 DRAFT PATTERN ANALYSIS AND APPLICATIONS 2 Abstract In a couple of years, graph cuts methods appeared as a leading method in computer vision and graphics due to their efficiency in computing globally optimal solutions. -

Algorithm for Fuzzy Maximum Flow Probdlemin Hyper
Linli Zhu et al.; Sch. J. Phys. Math. Stat., 2016; Vol-3; Issue-2 (Mar-May); pp-77-83 Scholars Journal of Physics, Mathematics and Statistics ISSN 2393-8056 (Print) Sch. J. Phys. Math. Stat. 2016; 3(2):77-83 ISSN 2393-8064 (Online) ©Scholars Academic and Scientific Publishers (SAS Publishers) (An International Publisher for Academic and Scientific Resources) Algorithm for Fuzzy Maximum Flow Probdlemin Hyper-Network Setting (II) Linli Zhu1*, Yu Pan1, Wei Gao2 1School of Computer Engineering, Jiangsu University of Technology, Changzhou 213001, China 2School of Information, Yunnan Normal University, Kunming 650500, China *Corresponding Author: Linli Zhu Email: [email protected] Abstract: Maximum flow problem on hypergraphs (hyper-networks) is an extension of maximum flow problem on normal graphs. In this report, we discuss a generalized fuzzy version of maximum flow problem in hyper-networks setting, and a new fuzzy maximum flow algorithm in hyper-network setting is obtained. Our algorithm mainly based on fuzzy set theory and incremental graph, and the technology of -cut is also employed to determine the fuzzy maximum flow. The implement procedure is manifested at last. Keywords: Hypergraph, maximum flow problem, incremental graph, -cut. INTRODUCTION AND NOTATIONS There is an important component of graph theory and artificial intelligence which is Maximum flow problem of weighted graph and it shows extensive applications in various fields like: computer network, data mining, image segmentation and ontology computation [1-7]. Hyper-graph, a subset system for limited set, is one of the most general discrete structures, and is the generalization of the common graph. In terms of lots of practical problems, the usage of the concept of hyper-graph shows more effective than the concept of graph. -

Multichannel Phase Unwrapping with Graph-Cuts Giampaolo Ferraioli, Aymen Shabou, Florence Tupin, and Vito Pascazio
1 Multichannel phase unwrapping with Graph-cuts Giampaolo Ferraioli, Aymen Shabou, Florence Tupin, and Vito Pascazio Abstract—Markovian approaches have proven to be effective minimum Lp norm unwrapping methods. Therefore, they do for solving the multichannel phase unwrapping problem, es- not optimally exploit statistical properties of the noise present pecially when dealing with noisy data and big discontinuities. on the data and they are not optimal from the information This paper presents a markovian approach to solve the phase unwrapping problem based on a new a priori model, the Total theoretical point of view. Moreover, differently from these Variation, and graph-cut based optimization algorithms. The approaches, we propose an algorithm that is able to unwrap proposed method turns to be fast, simple and robust. A set of and restore the solution at the same time. experimental results on both simulated and real data illustrate In the next section, we introduce the multichannel phase un- the effectiveness of our approach. wrapping (MCPU) technique with an inhomogeneous GMRF model. In section III, we present our new approach based on I. INTRODUCTION TV model and graph-cut optimization algorithms. Finally, we present some results showing the reconstruction obtained on In interferometric synthetic aperture radar systems, estima- simulated and real data. tion of the phase is a crucial point since there exists a known relation between InSAR phase and height values of the ground [1]. It is known that the measured phase (wrapped phase) is II. MULTICHANNEL PHASE UNWRAPPING given in the principal interval [−π, π], so phase unwrapping Multichannel phase unwrapping approach consists in com- (PU) problem has to be solved providing the absolute phase bining two or more independent interferograms. -
Graph Cuts for Fast Optimization in Markov Random Field Based Remote Sensing Image Analysis
Graph cuts for fast optimization in Markov Random Field based Remote Sensing image analysis Abdulmain Karimov March, 2010 Graph cuts for fast optimization in Markov Random Field based Remote Sensing image analysis by Abdulmain Karimov Thesis submitted to the International Institute for Geo-information Science and Earth Observation in partial fulfilment of the requirements for the degree of Master of Science in Geo-information Science and Earth Observation, Specialisation: Geoinformatics Thesis Assessment Board Chair: Ms Dr. Ir. W. Bijker External examiner: Dr. Ir. B.G.H. Gorte Supervisor: Dr. V.A. Tolpekin Second supervisor: Prof. Dr. A. Stein INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION ENSCHEDE, THE NETHERLANDS Disclaimer This document describes work undertaken as part of a programme of study at the International Institute for Geo-information Science and Earth Observation. All views and opinions expressed therein remain the sole responsibility of the author, and do not necessarily represent those of the institute. Abstract Optimization of energy is a challenging issue in Markov Random Field (MRF) based remote sensing image analysis. Traditional energy minimization methods such as Iterated Conditional Modes (ICM) and Simulated Annealing (SA) are widely used to deal with this problem. ICM does not provide a globally best estimation but it concentrates on local area and it does not provide optimal solution. SA is used to find globally optimal solutions for MRF based image analysis problems which allow approximating the global minimum of energy function that produces better quality of solutions, but at it takes long computational time to approximate the global minimum. Therefore, in order to address this problem faster energy minimization methods from vision are proposed. -
Multi-View Reconstruction Using Photo-Consistency and Exact Silhouette Constraints: a Maximum-Flow Formulation
Multi-view Reconstruction using Photo-consistency and Exact Silhouette Constraints: A Maximum-Flow Formulation Sudipta N. Sinha Marc Pollefeys Department of Computer Science, University of North Carolina at Chapel Hill, USA. Abstract when seen from different views must produce pixels with similar colors; this is the color consistency or the photo- This paper describes a novel approach for reconstructing a consistency constraint. In the ill-posed reconstruction prob- closed continuous surface of an object from multiple cali- lem, different scenes can be consistent with the same set of brated color images and silhouettes. Any accurate recon- color images. Theoritically the union of all photo-consistent struction must satisfy (1) photo-consistency and (2) silhou- scenes, the photo hull [12] is a unique reconstruction, but it ette consistency constraints. Most existing techniques treat is sensitive to the sampling rate of 3D voxels, the range of these cues identically in optimization frameworks where sil- textures in the scene and image noise. The reconstructed houette constraints are traded off against photo-consistency shape when re-projected must coincide with the respective and smoothness priors. Our approach strictly enforces sil- silhouettes; this is the silhouette consistency constraint.The houette constraints, while optimizing photo-consistency and exact visual hull’s silhouettes [1, 2] should be considered, smoothness in a global graph-cut framework. We transform when calibration or segmentation errors are present. the reconstruction problem into computing max-flow / min- SFS methods compute the visual hull [1, 14, 2, 5]; the cut in a geometric graph, where any cut corresponds to a maximal shape consistent with a set of silhouettes. -

Multi-Label Markov Random Fields As an Efficient and Effective Tool For
Numer. Math. Theor. Meth. Appl. Vol. 6, No. 1, pp. 169-198 doi: 10.4208/nmtma.2013.mssvm09 February 2013 Multi-Label Markov Random Fields as an Efficient and Effective Tool for Image Segmentation, Total Variations and Regularization Dorit S. Hochbaum∗ Department of Industrial Engineering and Operations Research, University of California, Berkeley, Ca 94720, USA. Received 6 December 2011; Accepted (in revised version) 12 September 2012 Available online 11 January 2013 Abstract. One of the classical optimization models for image segmentation is the well known Markov Random Fields (MRF) model. This model is a discrete optimization problem, which is shown here to formulate many continuous models used in image segmentation. In spite of the presence of MRF in the literature, the dominant perception has been that the model is not effective for image segmentation. We show here that the reason for the non-effectiveness is due to the lack of access to the optimal solution. Instead of solving optimally, heuristics have been engaged. Those heuristic methods cannot guarantee the quality of the solution nor the running time of the algorithm. Worse still, heuristics do not link directly the input functions and parameters to the output thus obscuring what would be ideal choices of parameters and functions which are to be selected by users in each particular application context. We describe here how MRF can model and solve efficiently several known continuous models for image segmentation and describe briefly a very efficient polynomial time algorithm, which is provably fastest possible, to solve optimally the MRF problem. The MRF algorithm is enhanced here compared to the algorithm in Hochbaum (2001) by allowing the set of assigned labels to be any discrete set. -

QPBO At-A-Glance(Copy)
Quadratic Pseudo-Boolean Optimization(QPBO): Theory and Applications At-a-Glance Presented By: Ahmad Al-Kabbany Under the Supervision of: Prof.Eric Dubois 12 June 2012 Outline Introduction The limitations of graph-cuts (GC) QPBO theory and properties What are we now able to do? Some results from the literature On-going work Key resources on QPBO A.Al-KabbanyJune 14, 2012 2 Introduction GC Limitations QPBO Capabilities Results On-going Key Work Resources Where am I in the literature? Labelling problems in IP and CV Intensities (restoration) Disparities (stereo) Motion vector components (optical flow) Objects/surfaces (segmentation) A.Al-KabbanyJune 14, 2012 3 Introduction GC Limitations QPBO Capabilities Results On-going Key Work Resources Where am I in the literature? A.Al-KabbanyJune 14, 2012 4 Introduction GC Limitations QPBO Capabilities Results On-going Key Work Resources Where am I in the literature? Labelling problems in IP and CV Intensities (restoration) Disparities (stereo) Motion vector components (optical flow) Objects/surfaces (segmentation) Formulated as optimization problems Minimizing a certain energy function Approximate inference on graphical models Markov random fields A.Al-KabbanyJune 14, 2012 5 Introduction GC Limitations QPBO Capabilities Results On-going Key Work Resources Where am I in the literature? The Markovian Property Gibbs-Markov random field model Neighbourhood system Defined on a sampling structure Γ, a subset of Λ Given a site “x” in Γ, and N a subset of Γ x {N ,x} is a valid neighbourhood