Fluid Power Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fluid Power, Rate Training Manual
DOCUMENT RESUME ED 070 578 SE 014 125 TITLE Fluid Power, Rate TrainingManual. INSTITUTION Bureau of Naval Personnel,Washington, D. C. REPORT NO NAVPERS-16193-B PUB DATE 70 NOTE 305p. EDRS PRICE MF-$0.65 HC-$13.16 DESCRIPTORS Force; *Hydraulics; Instructional Materials; *Mechanical Equipment; Military Personnel; *Military Science; *Military Training; Physics; *Supplementary Textbooks; Textbooks ABSTRACT Fundamentals of hydraulics and pneumatics are presented in this manual, prepared for regular navy and naval reserve personnel who are seeking advancement to Petty Officer Third Class. The history of applications of compressed fluids is described in connection with physical principles. Selection of types of liquids and gases is discussed with a background of operating temperature ranges, contamination control techniques, lubrication aspects, and safety precautions. Components in closed- and open-center fluid systems are studied in efforts to familiarize circuit diagrams. Detailed descriptions are made for .the functions of fluidlines, connectors, sealing devices, wipers, backup washers, containers, strainers, filters, accumulators, pumps, and compressors. Control and measurements of fluid flow and pressure are analyzed in terms of different types of flowmeters, pressure gages, and values; and methods of directing flow and converting power into mechanical force and motion, in terms of directional control valves, actuating cylinders, fluid motors, air turbines, and turbine governors. Also included are studies of fluidics, trouble shooting, hydraulic power drive, electrohydraulic steering, and missile and aircraft fluid power systems. Illustrations for explanation use and a glossary of general terms are included in the appendix. (CC) IDLE AV Agile 4'Aly , _ - , 141 ye ,,- I -,, FLUID POWER BUREAU OF OF NAVAL PERSONNEL .1% RATE TRAINING MANUAL NAVPERS 16,1937B PREFACE Fluid Power is written for personnel of the Navy and Naval Reserve whose duties and responsibilities require them to have a knowledge of the fundamentals of hydraulics and pneumatics. -
A Review of Biological Fluid Power Systems and Their Potential Bionic Applications
The University of Manchester Research A review of biological fluid power systems and their potential bionic applications DOI: 10.1007/s42235-019-0031-6 Document Version Accepted author manuscript Link to publication record in Manchester Research Explorer Citation for published version (APA): Liu, C., Wang, Y., Ren, L., & Ren, L. (2019). A review of biological fluid power systems and their potential bionic applications. Journal of Bionic Engineering. https://doi.org/10.1007/s42235-019-0031-6 Published in: Journal of Bionic Engineering Citing this paper Please note that where the full-text provided on Manchester Research Explorer is the Author Accepted Manuscript or Proof version this may differ from the final Published version. If citing, it is advised that you check and use the publisher's definitive version. General rights Copyright and moral rights for the publications made accessible in the Research Explorer are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Takedown policy If you believe that this document breaches copyright please refer to the University of Manchester’s Takedown Procedures [http://man.ac.uk/04Y6Bo] or contact [email protected] providing relevant details, so we can investigate your claim. Download date:04. Oct. 2021 A review of biological fluid power systems and their potential bionic applications Chunbao Liu1,2, Yingjie Wang 1,2, Luquan Ren 2, Lei Ren2,3 1 School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China 2 Key Laboratory of Bionic Engineering, Ministry of Education, Jilin University, Changchun 130022, China 3 School of Mechanical, Aerospace and Civil Engineering, University of Manchester, Manchester M13 9PL, UK Abstract Nature has always inspired human achievements in industry, and biomimetics is increasingly being applied in fluid power technology. -

What Is Hydraulic and Pneumatic System
Module-01 : INTRODUCTION TO HYDRAULIC AND PNEUMATIC SYSTEMS Lecture-01 : What is Hydraulic and Pneumatic System: Fluid power systems use fluids to transmit power and motion. Both liquids and gases are called fluids. Hence both these types of fluids are used in fluid power technology. Under liquids mostly mineral oil with suitable additives are used instead of plain water - (which, however, is used also in some cases) and under gases usually atmospheric air is used after cleaning it suitably. However, synthetic fluids with additives and other gasses are also used for specific purposes, such as fire resistance or the fluid itself is the product- milk as an example. That is the state of art behind these two modern technologies of industrial oil-hydraulics and pneumatics. Fluid power technology actually has a long history behind it. From early days of civilization mankind could feel the existence of power in the water currents of rivers and streams, in ocean waves and in the flowing breeze and in the turbulent storms. Early men could even harness some of these natural sources of energy. Wind energy, for example, was utilized in sailing boats and water current to drive water wheels. Hydroelectric power generation still uses the same idea, of course now-a- days in a much more efficient way. Fluid power technology in its earliest forms mostly took advantage of the motion of fluids or scientifically speaking of its kinetic energy. But the present day oil hydraulics mostly depends on the pressure-energy of the fluids rather than its velocity and in some cases it is even called as hydrostatic transmission of power. -
Design, Manufacture and Simulate a Hydraulic Bending Press
Int. J. Mech. Eng. & Rob. Res. 2013 Manar Abd Elhakim Eltantawie, 2013 ISSN 2278 – 0149 www.ijmerr.com Vol. 2, No. 1, January 2013 © 2013 IJMERR. All Rights Reserved Research Paper DESIGN, MANUFACTURE AND SIMULATE A HYDRAULIC BENDING PRESS Manar Abd Elhakim Eltantawie1* *Corresponding Author: Manar Abd Elhakim Eltantawie, [email protected] A small hydraulic press for V-bending operation is designed, manufactured and modeled. The hydraulic bending press consists of hydraulic circuit, punch, die and PLC control unit. Automation studio and SimHydraulic in Matlab/Simulink library are used to model the hydraulic circuit. Using PLC program, the bending operation is controlled. The press had to be capable of withstanding 2 tons of force. The punch and dies are designed to be rigidly fixed and easily removable, changeable to any kind of forming operation with decreasing of spring back effect of the sheet metal. Keywords: Hydraulic circuit, Bending press, SimHydraulic, Spring-back, PLC INTRODUCTION Hydraulic bending press has many Bending is a metal forming process in which advantages over other type of press, (1) It a force is applied to a piece of sheet metal may cost less than an equivalent mechanical causing bending of it to an angle and forming press. (2) Its production rate is equal to the the desired shape. Bending is typically mechanical press in a small lot of production, performed on a machine called a press brake where hand feeding and single stroking which can be manually or automatically occur. (3) In addition, the die shut heights operated. A press brake contains an upper tool variation do not change the force applied. -
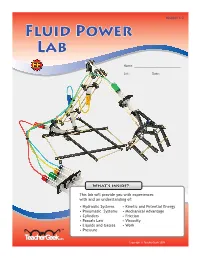
Fluid Power Lab
Revision 3.0 Fluid Power Lab Name: ___________________________ Set: ____________ Date: ___________ What’s inside? This lab will provide you with experiences with and an understanding of: • Hydraulic Systems • Kinetic and Potential Energy • Pneumatic Systems • Mechanical Advantage • Cylinders • Friction • Pascals Law • Viscosity • Liquids and Gasses • Work ™ • Pressure Copyright © TeacherGeek 2008 Fluid Power Lab ™ Page 2 Fluid Power Fluid power is an area of technology dealing with the generation, control and transmission of pressurized fluids. A fluid can be a gas or a liquid. Pneumatics Hydraulics Pneumatic systems use Compressor Hydraulic systems use a liquid a gas to transmit and (Pump) to transmit power. store power. Pneumatic Hydraulic Hydraulic Pump, Nail Gun Cylinder Reservoir and Controls Hydraulics make heavy equipment incredibility powerful. Hose (Pipeline) Tank to Store Compressed Air Pneumatic Devices 1. List 2 devices that use pneumatics for operation. Describe how they use pneumatics. Device How does it use pneumatics? Hydraulic Devices 2. List 2 devices that use hydraulics for operation. Describe how they use hydraulics. Device How does it use hydraulics? Copyright © TeacherGeek 2008 Fluid Power Lab ™ Page 3 Cylinders Cylinders transform pressure and fluid flow into mechanical force. Anatomy of a Cylinder Fluid Port Fluid Port Chambers A and B are sealed, Piston Piston Rod Mount so fluid can only enter or exit through the ports. Pressure in a A B chamber creates a force on the Piston and rod piston. slide in cylinder Cylinder Double-Acting Cylinders Most cylinders are double-acting. Double acting cylinders allow pressurized fluid to flow on either side of the piston, allowing it to be powered in both directions. -

Introduction to Fluid Power
This sample chapter is for review purposes only. Copyright © The Goodheart-Willcox Co., Inc. All rights reserved. Chapter 1 Introduction to Fluid Power The Fluid Power Field Since the beginning of time, long before written history, humankind has searched for ways to conveniently transmit energy from its source to where it is needed and then convert the energy into a useful form to do work. This chapter introduces the fluid power field as an approach that provides an effective means of transferring, controlling, and converting energy. Selected Key Terms Internet Resources The following names and terms will be used in www.ideafi nder.com/history/inventors/watt.htm Objectives this chapter. As you read the text, record the mean- The Great Idea Finder After completing this chapter, you will be able to: ing and importance of each. Additionally, you may Provides information on James Watt and other inventors ■ use other sources, such as manufacturer literature, who made major contributions to industrial development Define the terms fluid power, hydraulic system, and pneumatic system. during the Industrial Revolution. ■ an encyclopedia, or the Internet, to obtain more Explain the extent of fluid power use in current society and provide information. www.island-of-freedom.com/pascal.htm several specific examples. actuator Island of Freedom ■ List the advantages and disadvantages of fluid power systems. Archimedes Provides details of the contributions of Blaise Pascal and others to science, mathematics, and philosophy. ■ Discuss scientific discoveries and applications important to the historical Bernoulli, Daniel www.nfpa.com development of the fluid power industry. Boyle, Robert Bramah, Joseph National Fluid Power Association Charles, Jacques A good overall review of the basic aspects of fluid power systems. -

Lecture 1 INTRODUCTION to HYDRAULICS and PNEUMATICS
Lecture 1 INTRODUCTION TO HYDRAULICS AND PNEUMATICS Learning Objectives Upon completion of this chapter, the student should be able to: Explain the meaning of fluid power. List the various applications of fluid power. Differentiate between fluid power and transport systems. List the advantages and disadvantages of fluid power. Explain the industrial applications of fluid power. List the basic components of the fluid power. List the basic components of the pneumatic systems. Differentiate between electrical, pneumatic and fluid power systems. Appreciate the future of fluid power in India. 1.1 Introduction In the industry we use three methods for transmitting power from one point to another. Mechanical transmission is through shafts, gears, chains, belts, etc. Electrical transmission is through wires, transformers, etc. Fluid power is through liquids or gas in a confined space. In this chapter, we shall discuss a structure of hydraulic systems and pneumatic systems. We will also discuss the advantages and disadvantages and compare hydraulic, pneumatic, electrical and mechanical systems. 1.2 Fluid Power and Its Scope Fluid power is the technology that deals with the generation, control and transmission of forces and movement of mechanical element or system with the use of pressurized fluids in a confined system. Both liquids and gases are considered fluids. Fluid power system includes a hydraulic system (hydra meaning water in Greek) and a pneumatic system (pneuma meaning air in Greek). Oil hydraulic employs pressurized liquid petroleum oils and synthetic oils, and pneumatic employs compressed air that is released to the atmosphere after performing the work. Perhaps it would be in order that we clarify our thinking on one point. -

2018 Annual Report on the US Fluid Power Industry
a 2018 ANNUAL REPORT ON THE U.S. FLUID POWER INDUSTRY Foreword Welcome to our sixth annual report on the U.S. fluid power industry—one of the most important yet least understood industries in the U.S. economy. Most people do not know that: • Fluid power (hydraulics and pneumatics) is a workhorse across the U.S. economy, the technology of choice for dozens of industries and hundreds of applications. • In 2018, the manufacture of fluid power components was a $23.5 billion industry in the United States. It was also competitive worldwide, with 2018 exports valued at $6.5 billion. Fluid power systems transmit more power • It is estimated that 862 companies in the United States employ more than 67,149 people in the manufacture of fluid power components, representing an annual payroll of more than $4.3 billion. in a smaller space than other forms of power • Fluid power has a major downstream economic impact. Ten key industries that depend on fluid power include an estimated 23,200 companies in the United States, employing more than 778,056 people for an annual transmission, making fluid power payroll of more than $49.5 billion. • Fluid power and the industries it serves depend on a highly educated workforce, leading to investment in new the technology of choice across dozens fluid power education and training resources. More two-year and four-year colleges are teaching fluid power. of industries and hundreds of applications. • Fluid power systems consume a major portion of our nation’s energy. Existing technologies and best practices have been shown to reduce energy use in some fluid power systems by 30% or more. -

Instructions & Repair Parts Manual for Piranha 25 Ton Press Brake
Serial No._________________________________________ Instructions & Repair Parts Manual for Piranha 25 Ton Press Brake No part of this manual may be stored in a retrieval system, transmitted, or reproduced in any way. Including, but not limited to photocopy, photograph, and magnetic or other record without the prior agreement and written per- mission of Mega Manufacturing, Inc. PIRANHA 25 TON PRESS BRAKE PIRANHA ■ P.O. Box 457 ■ Hutchinson, Kansas 67504 Voice (800) 338-5471 ■ Fax (620) 662-1719 ■ www.piranhafab.com Piranha P.O. Box 457 Hutchinson, Ks 67504 Voice (800) 338-5471 Fax (316) 662-1719 Web Site www.piranhafab.com No part of this manual may be stored in a retrieval system, transmitted, or, reproduced in any way. Including but not limited to photocopy, photograph, and magnetic or other record without the prior agreement and written permission of Mega Manufacturing Inc. PN: T2924 25-4 GEN II Manual Table of Contents Safety .......................................................................................................................................... 1 Warning Labels ........................................................................................................................... 2 Tooling Installation Safety.......................................................................................................... 4 Safety Standards & Specifications .............................................................................................. 5 Introduction................................................................................................................................ -

Modeling of a Hydraulic Braking System
Modeling of a Hydraulic Braking System CHRISTOPHER LUNDIN Master’s Degree Project Stockholm, Sweden 2015 IR-EE-SB 2015:000 Abstract The objective of this thesis is to derive an analytical model representing a re- duced form of a mine hoist hydraulic braking system. Based primarily on fluid mechanical and mechanical physical modeling, along with a number of simplifying assumptions, the analytical model will be derived and expressed in the form of a system of differential equations including a set of static functions. The obtained model will be suitable for basic simulation and analysis of system dynamics, with the aim to capture the fundamentals regarding feedback control of the brake system pressure. The thesis will mainly cover hydraulic servo valve and brake caliper modeling including static modeling of brake lining stress-strain and disc spring deflection- force characteristics. Nonlinearities such as servo valve hysteresis, saturation, effects of under- or overlapping spool geometry, flow forces, velocity limitations and brake caliper frictional forces have intentionally been excluded in order not to make the model overly complex. The hydraulic braking system will be described in detail and basic theory that is needed regarding fluid properties and fluid mechanics will also be covered so as to facilitate the reader in his understanding of the material presented in this work. Overall, the scope of this thesis is broad and more work remains in order to complement the model of the system both qualitatively and quantitatively. Although not complete in its simplified form and with known nonlinearities aside, the validity of the model in the lower frequency domain is confirmed by results given in form of measurements and dynamic simulation. -

U.S. Fluid Power Industry
2017 ANNUAL REPORT ON THE U.S. FLUID POWER INDUSTRY National Fluid Power Association www.nfpa.com At a glance: An American workhorse Fluid power (hydraulics and pneumatics) is the technology of choice for dozens of industries and hundreds of applications—and a workhorse of the U.S. economy. $21.7 BILLION $5.9 BILLION 67,000 PEOPLE It’s a $21.7 billion dollar industry And the industry’s impact is global, that, here in the U.S., directly employs with exports valued at $5.9 billion. more than 67,000 people and indirectly supports jobs for 775,000 more. Let’s take a closer look at uid power—enduring and essential. © NFPA, 2017 Annual Report on the U.S. Fluid Power Industry Understanding the uid power advantage Fluid power systems transmit more power in a smaller space than is possible with other technologies. Hydraulics and pneumatics both use a uid to transmit power from one place to another. LIQUID GAS In hydraulics, the uid is a liquid – usually oil. In pneumatics, it’s a gas – usually compressed air. Fluid power systems typically use valves to control direction, speed, force and torque. They can handle challenges from tunnel-boring through hard rock to precision placement of delicate machine components. © NFPA, 2017 Annual Report on the U.S. Fluid Power Industry Applying uid power across industries Hydraulic Advantages: Pneumatic Advantages: High power-to-weight ratio Inexpensive and lightweight High torque at low speed Simple control systems Ability to hold torque constant Clean and non-reactive in magnetic environments Ruggedness and -
Fluid Power (Part 1) – Hydraulic Principles
Fluid Power (Part 1) – Hydraulic Principles Course No: M04-016 Credit: 4 PDH A. Bhatia Continuing Education and Development, Inc. 22 Stonewall Court Woodcliff Lake, NJ 07677 P: (877) 322-5800 [email protected] NAVEDTRA 12964 Naval Education and July 1990 Training Manual Training Command 0502-LP-213-2300 (TRAMAN) Fluid Power DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Nonfederal government personnel wanting a copy of this document must use the purchasing instructions on the inside cover. FLUID POWER NAVEDTRA 12964 1990 Edition Prepared by MWC Albert Beasley, Jr. CHAPTER 1 INTRODUCTION TO FLUID POWER Fluid power is a term which was created to hazardous fluids, liquid contamination, and include the generation, control, and application control of contaminants. of smooth, effective power of pumped or Chapter 4 covers the hydraulic pump, the compressed fluids (either liquids or gases) when component in the hydraulic system which this power is used to provide force and motion generates the force required for the system to to mechanisms. This force and motion maybe in perform its design function. The information the form of pushing, pulling, rotating, regulating, provided covers classifications, types, operation, or driving. Fluid power includes hydraulics, which and construction of pumps. involves liquids, and pneumatics, which involves Chapter 5 deals with the piping, tubing and gases. Liquids and gases are similar in many flexible hoses, and connectors used to carry fluids respects. The differences are pointed out in the under pressure. appropriate areas of this manual. Chapter 6 discusses the classification, types, and operation of valves used in the control of This manual presents many of the funda- flow, pressure, and direction of fluids.