GRT1-ECT Operation Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RX130 Group RX Capacitive Touch Evaluation System CPU Board User's Manual 1
User’s Manual 表紙 RX130 Group 32 RX Capacitive Touch Evaluation System CPU Board User’s Manual Renesas 32-bit Microcontroller RX Family/RX100 Series Renesas Solution Starter Kit RX Capacitance Touch Evaluation System All information contained in these materials, including products and product specifications, represents information on the product at the time of publication and is subject to change by Renesas Electronics Corp. without notice. Please review the latest information published by Renesas Electronics Corp. through various means, including the Renesas Electronics Corp. website (http://www.renesas.com). www.renesas.com Rev.1.00 Feb 2016 Notice 1. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. You are fully responsible for the incorporation of these circuits, software, and information in the design of your equipment. Renesas Electronics assumes no responsibility for any losses incurred by you or third parties arising from the use of these circuits, software, or information. 2. Renesas Electronics has used reasonable care in preparing the information included in this document, but Renesas Electronics does not warrant that such information is error free. Renesas Electronics assumes no liability whatsoever for any damages incurred by you resulting from errors in or omissions from the information included herein. 3. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. -
Support Manual Revision 00
OMRON Connect Support Manual, V00 Prepared and controlled by QA/RA/TCS Department, OHE OMRON Healthcare Europe B.V. Support Manual Revision 00 OMRON Connect, Support Manual 1 of 23 OMRON Connect Support Manual, V00 Prepared and controlled by QA/RA/TCS Department, OHE Contents Acronyms and abbreviations .......................................................................................................... 3 0 Document section flowchart .................................................................................................... 4 1 General use description .......................................................................................................... 5 1.1 Download and installment of OMRON Connect .............................................................. 5 1.2 Transferring data to OMRON Connect ............................................................................ 6 2 List of supported smartphones (up to April 2016) ................................................................... 7 3 List of supported OMRON devices .......................................................................................... 8 4 FAQ section ............................................................................................................................. 9 4.1 FAQ App ........................................................................................................................... 9 4.1.1 OMRON Connect devices/recommended mobile devices and OS’s....................... 9 4.1.2 Device registration/settings -
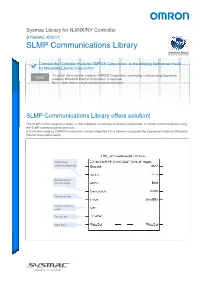
SLMP Communications Library
Sysmac Library for NJ/NX/NY Controller SYSMAC-XR017 SLMP Communications Library Connect the Controller made by OMRON Corporation to the existing Sequencer made by Mitsubishi Electric Corporation To install the Controller made by OMRON Corporation, connecting to the existing Sequencer Issue made by Mitsubishi Electric Corporation is required. But it takes time to create communications programs. SLMP Communications Library offers solution! The SLMP Communications Library is the collection of software functional components to control communications using the SLMP communications protocol. A Controller made by OMRON Corporation can be integrated into a network composed the Sequencer made by Mitsubishi Electric Corporation easily. SLMP frame communicating code Device code for the write target First device No. Number of device points Timeout time Write data System Configurations Request message / Command Ethernet Mitsubishi Electric Sequencer Response message / Response Compatible Models OMRON Corporation Name Model Version NX701-1@@@ NX1P2-@@@@@@(1) Machine Automation Controller NJ501-@@@@ Version 1.18 or later NJ/NX CPU Unit NJ301-@@@@ NJ101-@@@@ NX102-@@@@ Version 1.30 or later Industrial PC Platform NY5@@-1 Version 1.18 or later NY IPC Machine Controller NY5@@-5 Automation Software SYSMAC-SE2@@@ Version 1.23 or higher Sysmac Studio Mitsubishi Electric Corporation Name Model MELSEC iQ-R series Sequencer MELSEC-Q/L series MELSEC iQ-F series Function Block (FB) Specifications Name FB name Description Reading values from the specified device is possible. Device Read SLMP_DeviceRead The read position, size, and type(word, bit) can be specified. SLMP_DeviceWriteWord, Writing values to the specified device is possible. Device Write SLMP_DeviceWriteBool The write position and size can be specified. -
Model M2 Basic • Instruction Manual EN • Gebrauchsanweisung DE
HEM-7116-E(V)_EN_DE.book Page 1 Monday, June 18, 2012 4:21 PM Digital Automatic Blood Pressure Monitor Model M2 Basic • Instruction Manual EN • Gebrauchsanweisung DE IM-HEM-7116-E(V)-03-05/2012 5331307-2C 12E1131 HEM-7116-E(V)_EN_DE.book Page 2 Monday, June 18, 2012 4:21 PM Contents Before using the unit Introduction..................................................................................3 Important Safety Information......................................................4 1. Overview..................................................................................7 2. Preparation............................................................................10 2.1 Installing/Replacing the Batteries......................................10 Operating instructions 3. Using the Unit........................................................................12 3.1 How to Sit Correctly When Taking a Measurement ..........12 3.2 Applying the Arm Cuff .......................................................14 3.3 Taking a Reading..............................................................16 3.4 Instructions for Special Conditions....................................19 3.5 Using the Memory Function ..............................................20 4. Quick Reference Guide ........................................................22 Care and maintenance 5. Handling Errors and Problems............................................23 5.1 Error Messages.................................................................23 5.2 Troubleshooting ................................................................25 -
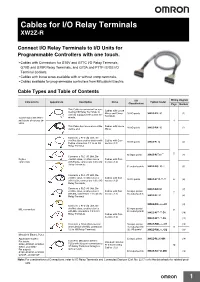
Cables for I/O Relay Terminals XW2Z-R
Cables for I/O Relay Terminals XW2Z-R Connect I/O Relay Terminals to I/O Units for Programmable Controllers with one touch. • Cables with Connectors for G70V and G7TC I/O Relay Terminals, G70D and G70R Relay Terminals, and G70A and P7TF-IS/OS I/O Terminal Sockets. • Cables with loose wires available with or without crimp terminals. • Cables available for programmable controllers from Mitsubishi Electric. Cable Types and Table of Contents I/O Wiring diagram Connects to Appearance Description Name Typical model Classification Page Number This Cable is convenient for con- Cables with Loose necting I/O Relay Terminals to Wires and Crimp 16 I/O points XW2Z-RY C (1) devices equipped with screw ter- Terminals Connections with termi- minals. nal blocks of various de- 4 vices This Cable has loose wires at the Cables with Loose 16 I/O points XW2Z-RA C (2) device end. Wires Connects a PLC I/O Unit, De- viceNet slave or other device with Cables with Con- 16 I/O points XW2Z-R C (3) Fujitsu connectors 1:1 to an I/O nectors (1:1) Relay Terminal. 5 32 input points XW2Z-RI C- (4) Connects a PLC I/O Unit, De- Fujitsu viceNet slave, or other device Cables with Con- connectors with Fujitsu connectors 1:2 to I/O nectors (1:2) Relay Terminals. 32 output points XW2Z-RO C- (5) Connects a PLC I/O Unit, De- viceNet slave, or other device Cables with Con- 48 I/O points XW2Z-R C- - 6(6) with Fujitsu connectors 1:3 to I/O nectors (1:3) Relay Terminals. -

ISSM2020 –International Symposium on Semiconductor Manufacturing SPONSORSHIP December 15-16, 2020, Tokyo, Japan
ISSM2020 –International Symposium on Semiconductor Manufacturing SPONSORSHIP December 15-16, 2020, Tokyo, Japan Shozo Saito Chairman, ISSM2020 Organizing Committee Device & System Platform Development Center Co., Ltd. Shuichi Inoue, ATONARP INC. It is our great pleasure to announce that The 28th annual International Symposium on Semiconductor Manufacturing (ISSM) 2020 will be held on December 15-16, 2020 at KFC Hall, Ryogoku, Tokyo in cooperation with e-Manufacturing & Design Collaboration Symposium (eMDC) which is sponsored by TSIA with support from SEMI and GSA. The program will feature keynote speeches by world leading speakers, timely and highlighted topics and networking sessions focusing on equipment/materials/software/services with suppliers' exhibits. ISSM continues to contribute to the growth of the semiconductor industry through its infrastructure for networking, discussion, and information sharing among the world's professionals. We would like you to cooperate with us by supporting the ISSM 2020. Please see the benefit of ISSM2020 sponsorship. Conference Overview Date: December 15-16, 2020 Location: KFC (Kokusai Fashion Center) Hall 1-6-1 Yokoami Sumidaku, Tokyo 130-0015 Japan +81-3-5610-5810 Co-Sponsored by: IEEE Electron Devices Society Minimal Fab Semiconductor Equipment Association of Japan (SEAJ) Semiconductor Equipment and Materials International (SEMI) Taiwan Semiconductor Industry Association (TSIA) Endorsement by: The Japan Society of Applied Physics Area of Interest: Fab Management Factory Design & Automated Material -

PUBLIC SUBMISSION Posted: November 20, 2020 Tracking No
Page 1 of 2 As of: 11/23/20 10:03 AM Received: November 18, 2020 Status: Posted PUBLIC SUBMISSION Posted: November 20, 2020 Tracking No. 1k4-9k60-8cjw Comments Due: December 03, 2020 Submission Type: Web Docket: PTO-C-2020-0055 Request for Comments on Discretion to Institute Trials Before the Patent Trial and Appeal Board Comment On: PTO-C-2020-0055-0001 Discretion to Institute Trials Before the Patent Trial and Appeal Board Document: PTO-C-2020-0055-0452 Comment from Japan Business Machine and Information System Industries Association Submitter Information Name: Hideaki Chishima Address: Lila Hijirizaka 7FL 3-4-10, Mita Minato-ku, Tokyo, Japan, 1080073 Email: [email protected] Phone: +81-3-6809-5495 Fax: +81-3-3451-1770 Submitter's Representative: Hideki Sanatake Organization: Japan Business Machine and Information System Industries Association General Comment Dear Sir, This post is for Japan Business Machine and Information System Industries Association (JBMIA) to submit its comments in response to solicitation of public comments by USPTO as announced in Federal Register / Docket No. PTO-C-2020-0055. The comments are attached hereto. JBMIA is a Japanese incorporated association which was renamed in 2002 from Japan Business Machine Makers Association established originally in 1960. JBMIA consists of 40 member companies engaged in business machine and information system and 5 supporting companies. Almost all of the member companies have actively filed patent applications in the USA. https://www.fdms.gov/fdms/getcontent?objectId=0900006484967b2a&format=xml&sho... 11/23/2020 Page 2 of 2 Sincerely, Hideaki Chishima (Mr) Intellectual Property Committee Secretariat Attachments JBMIA Comment (finnal) https://www.fdms.gov/fdms/getcontent?objectId=0900006484967b2a&format=xml&sho.. -

NY-Series Industrial Box PC Hardware User's Manual (W553) 1 Introduction
Industrial PC Platform NY-series Industrial Box PC Hardware User's Manual NYB££-££0 NYB££-££1 NYB££-££2 NYB££-££3 NYB££-££4 Industrial Box PC W553-E2-09 NOTE All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or other- wise, without the prior written permission of OMRON. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because OMRON is constantly striving to improve its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in this publica- tion. Trademarks • Sysmac and SYSMAC are trademarks or registered trademarks of OMRON Corporation in Japan and other countries for OMRON factory automation products. • Windows is a registered trademark of Microsoft Corporation in the USA and other countries. • The SD and SDHC logos are trademarks of SD-3C, LLC. • CFAST is a registered trademark of CompactFlash Association. • Intel, the Intel Logo, Celeron and Intel Core are trademarks of Intel Corporation in the U.S. and/or other countries. Other company names and product names in this document are the trademarks or registered trade- marks of their respective companies. Copyrights Microsoft product screen shots reprinted with permission from Microsoft Corporation. Introduction Introduction Thank you for purchasing the Industrial Box PC. -
Published on 7 October 2016 1. Constituents Change the Result Of
The result of periodic review and component stocks of TOPIX Composite 1500(effective 31 October 2016) Published on 7 October 2016 1. Constituents Change Addition( 70 ) Deletion( 60 ) Code Issue Code Issue 1810 MATSUI CONSTRUCTION CO.,LTD. 1868 Mitsui Home Co.,Ltd. 1972 SANKO METAL INDUSTRIAL CO.,LTD. 2196 ESCRIT INC. 2117 Nissin Sugar Co.,Ltd. 2198 IKK Inc. 2124 JAC Recruitment Co.,Ltd. 2418 TSUKADA GLOBAL HOLDINGS Inc. 2170 Link and Motivation Inc. 3079 DVx Inc. 2337 Ichigo Inc. 3093 Treasure Factory Co.,LTD. 2359 CORE CORPORATION 3194 KIRINDO HOLDINGS CO.,LTD. 2429 WORLD HOLDINGS CO.,LTD. 3205 DAIDOH LIMITED 2462 J-COM Holdings Co.,Ltd. 3667 enish,inc. 2485 TEAR Corporation 3834 ASAHI Net,Inc. 2492 Infomart Corporation 3946 TOMOKU CO.,LTD. 2915 KENKO Mayonnaise Co.,Ltd. 4221 Okura Industrial Co.,Ltd. 3179 Syuppin Co.,Ltd. 4238 Miraial Co.,Ltd. 3193 Torikizoku co.,ltd. 4331 TAKE AND GIVE. NEEDS Co.,Ltd. 3196 HOTLAND Co.,Ltd. 4406 New Japan Chemical Co.,Ltd. 3199 Watahan & Co.,Ltd. 4538 Fuso Pharmaceutical Industries,Ltd. 3244 Samty Co.,Ltd. 4550 Nissui Pharmaceutical Co.,Ltd. 3250 A.D.Works Co.,Ltd. 4636 T&K TOKA CO.,LTD. 3543 KOMEDA Holdings Co.,Ltd. 4651 SANIX INCORPORATED 3636 Mitsubishi Research Institute,Inc. 4809 Paraca Inc. 3654 HITO-Communications,Inc. 5204 ISHIZUKA GLASS CO.,LTD. 3666 TECNOS JAPAN INCORPORATED 5998 Advanex Inc. 3678 MEDIA DO Co.,Ltd. 6203 Howa Machinery,Ltd. 3688 VOYAGE GROUP,INC. 6319 SNT CORPORATION 3694 OPTiM CORPORATION 6362 Ishii Iron Works Co.,Ltd. 3724 VeriServe Corporation 6373 DAIDO KOGYO CO.,LTD. 3765 GungHo Online Entertainment,Inc. -

The State of the PV Industry - an Association Perspective
The State of the PV Industry - An Association Perspective Karen Savala President, SEMI Americas Outline Teaching • About SEMI & PV Group students about solar energy • Semiconductor & PV • Global Energy Market & Renewables • Global PV Market • U.S. PV Market • The Importance of Standards • Call for Action Providing a voice for the solar industry Public Policy White Papers About SEMI • Global industry association w/ offices in US, Belgium, Germany, France, China, Taiwan, Singapore, Korea, Japan, Russia, and India • 1900+ member companies (480+ PV) • Established 1970 to serve the semiconductor supply chain • Today serves members in: • Semiconductor, Photovoltaic, Flat Panel Display, Emerging Markets – MEMS, LED/SSL, Printed Electronics, and Nanotechnology • Governed by Board of Directors with extensive advisory committee and Special Interest Group (SIG) structure SEMI PV Group Formed to represent SEMI member companies involved in the solar/PV manufacturing supply chain. Our Focus is PV Manufacturing • Leverage semiconductor's existing core competencies in order to create a long-term sustainable market through: • Supply chain collaboration & roadmapping activities (ITRS model) • International standards development • Global public policy and advocacy • Expand the market while continuing to drive down costs • Achieve the carbon reduction goals proposed by many nations PV Group's Global Scope •More than 480 global companies form PV Group, many of them with history and expertise in semiconductor manufacturing •More than160 SEMI PV Group member companies reside in the United States • Advisory Committees established in Europe, North America, China, India, Taiwan and Korea; Japan in formation • Our member companies cover the PV manufacturing supply chain from feedstock to module assembly and balance of systems SEMI is Governed by an International Board of Directors Energy/PV Solar Standing Committee • M. -

PLC Programming Software Settings MITSUBISHI ELECTRIC GX
12 Ladder Transfer PLC Programming Software Settings Set the COM port number configured in the [Ladder Transfer Setting] window of LadderComOp to the following window of the relevant PLC programming software to enable communication with the PLC. Example: [Ladder Transfer Setting] window, COM port number 9 MITSUBISHI ELECTRIC GX Developer/GX Works2 For [Transmission speed], specify the same value as the baud rate between the V9 series unit and the PLC. OMRON CX-Programmer Be sure to select “SYSMAC WAY” for [Network Type]. [Network Settings] dialog [Driver] [Port Name] For [Baud Rate], specify the same value between the V9 unit and the PLC. Panasonic “FPWIN GR” [Communication Settings] dialog [Port No.] For [Baud Rate], specify the same value between the V9 unit and the PLC. Yokogawa Electric “Wide Field2” [Environmental Settings] dialog [Communication Settings] [COM Port No.] 12-18 12.2 Serial Connection between the V9 Series Unit and PLC Fuji Electric SX-Programmer Expert (D300win) 1 For [Baud rate], specify the same value as the baud rate between the V9 series unit and the PLC. 12 3 Siemens “STEP 7-Micro/WIN” [Set PG/PC Interface] dialog [PC/PPI cable (PPI)] [Properties]. 4 The baud rate between the V9 unit and the PC is fixed to 115 Kbps. 5 Siemens SIMATIC Manager 6 Set [Connection to:] in the range of 7 COM1 to 8. [Transmission rate:] does not need to be changed. 8 9 10 12-19 12 Ladder Transfer Telemecanique Drivers Manager Specify the same baud rate for both the V9 series unit and PLC. V-SFT [System Setting] [Hardware Setting] [Ladder Transfer] [Detailed Setting] UNI-TELWAY Slave Address Specify the same [Base] and [Numbers] values. -

Human Machine Interface Solution Kit R0K5RX231D000BR Overview
APPLICATION NOTE R01AN2586EJ0102_RX231 RX231 Group Rev.1.02 2016.12.01 Human Machine Interface Solution Kit R0K5RX231D000BR Overview This document is the user’s manual for the Human Machine Interface Solution Kit (R0K5RX231D000BR). R0K5RX231D000BR (also referred to as the HMI Solution Kit herein) uses the Renesas Electronics Corporation RX231 32-bit microcontroller and Smart Analog IC. The HMI Solution Kit board serves as a demo and evaluation system for USB, LCD, touch key, voice record & playback, and motion detection functions and low-power operations. (1) Demo applications Demo programs are preloaded before shipment; the R0K5RX231D000BR is ready for immediate use. ・Low-power demo: power-saving example of device using wake-up upon motion detection ・Voice record & playback demo: voice memo and pre-set sound replay based on MCU software (2) Evaluation Applications ・Software development using Kit system hardware ・Function expansions to MCU or Smart Analog IC using connectors CN3, CN5 and CN6 ・Sensor mediation through Workbench6: Integrated Development Environment for Renesas Capacitive Touch ・Debugging via E1 emulator. Programing in USB boot mode. R01AN2586EJ0102_RX231 Rev.1.02 Page 1 of 35 2016.12.01 RX231 Group Human Machine Interface Solution Kit R0K5RX231D000BR Contents 1. Important Notes ................................................................................................................................. 4 2. Safety Items .....................................................................................................................................